







 本文介绍了车载雷达在自动泊车、自适应巡航等驾驶辅助系统中的应用,重点讲解了距离估计的基本原理,包括距离与电磁波往返时间的关系、调制脉冲连续波的重要性、脉冲重复间隔对最大探测距离的影响,以及噪声环境下的时间延迟估计。同时,讨论了距离分辨率的概念及其与脉冲宽度的关联,并提及了解决短脉冲能量低问题的脉冲压缩技术。
本文介绍了车载雷达在自动泊车、自适应巡航等驾驶辅助系统中的应用,重点讲解了距离估计的基本原理,包括距离与电磁波往返时间的关系、调制脉冲连续波的重要性、脉冲重复间隔对最大探测距离的影响,以及噪声环境下的时间延迟估计。同时,讨论了距离分辨率的概念及其与脉冲宽度的关联,并提及了解决短脉冲能量低问题的脉冲压缩技术。
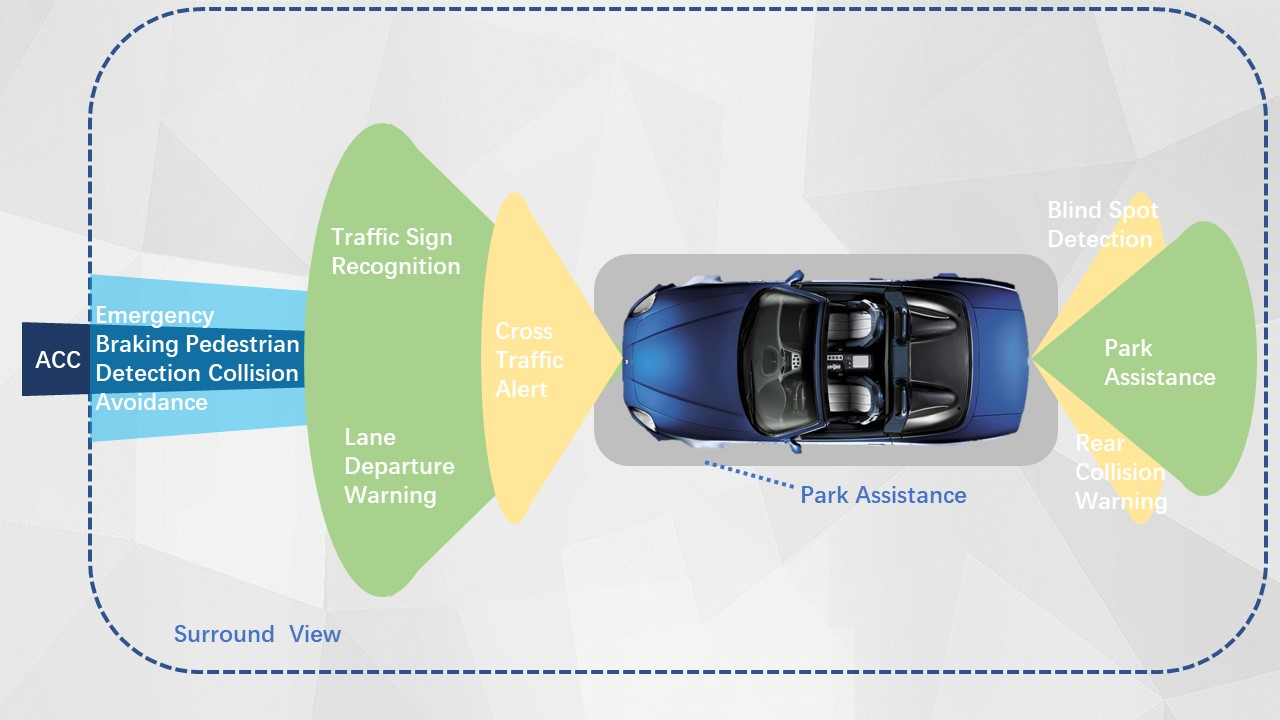
目前,雷达主要被用于提升车辆驾驶的舒适度和安全性,比如常见的自动泊车(Park Assisi,PA),自适应驾驶巡航(Adaptive Cruise Control,ACC)等,下面将会给出现有的车辆ADAs系统中所包含的内容,其中每个子系统由于应用场景的不同,分别具有不同的雷达测量指标要求,这一点在实际的工程应用中十分重要。但是,需要指出的是,不管是什么场景下的应用,其基本的原理和算法是相同的。下面的部分将会对automotive radar的基本估计问题,比如距离估计,速度估计等问题的基本原理进行介绍。
由于目前的automotive radar所采用的主要是工作在24GHz以及77GHz的毫米波,因此我们可以获得较高的距离和速度分辨率。基本的估计主要包括三个方面:距离,速度和方位等。下面首先介绍automotive radar的距离估计原理。
距离估计是automotive radar中一个基本的估计问题,目标相对于雷达的距离 R R R是由电磁波从发射到接收的这段时间决定的,若令这段时间为 τ \tau τ,则此时目标的距离 R = ( c τ / 2 ) R=(c\tau/2) R=(cτ/2),除2是因为从发射到接收是一个来回,因此,目标的距离是由 τ \tau τ确定得到。而雷达发射电磁波信号的形式对估计信号来回时间 τ \tau τ的估计是十分重要的,举个例子,调制后的脉冲连续波(CW)包含周期的短脉冲和静默段
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









