




研究背景
在机器人抓取领域,传统方法常受限于对已知物体的依赖、静态抓取姿态的局限性,以及对外部干扰(如碰撞、观测噪声)的低适应性。苏黎世联邦理工学院联合香港科技大学以优傲机器人(UR5机械臂)搭载灵巧手为硬件载体,提出了一套基于强化学习的动态灵巧抓取框架,旨在解决 “未知物体泛化抓取” 和 “干扰下稳健抓取” 两大核心问题。
该框架通过单视角视觉输入即可实现对500余种未知物体(包括薄型、小型、重型、可变形及透明物体)的抓取,并能在意外碰撞、外力扰动等场景下保持稳定。最终在仿真中实现247,786个未知物体97.0% 的抓取成功率,在真实场景中实现512个未知物体94.6%的成功率,突破了传统方法对已知物体模型和多视角感知的依赖。
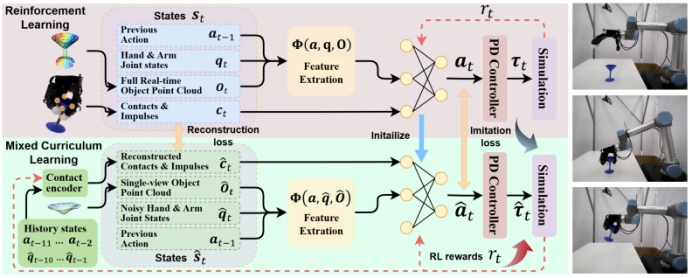
RobustDexGrasp框架:首先使用由强化学习(RL)驱动的特权视觉触觉感知来训练一个教师策略。然后,我们使用单视图对象点云和嘈杂的本体感觉来训练一个学生策略,由我们的混合课程学习方法驱动,该方法从IL开始以高效地蒸馏教师策略,并逐渐过渡到RL以在干扰下进行探索。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1371
1371

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









