






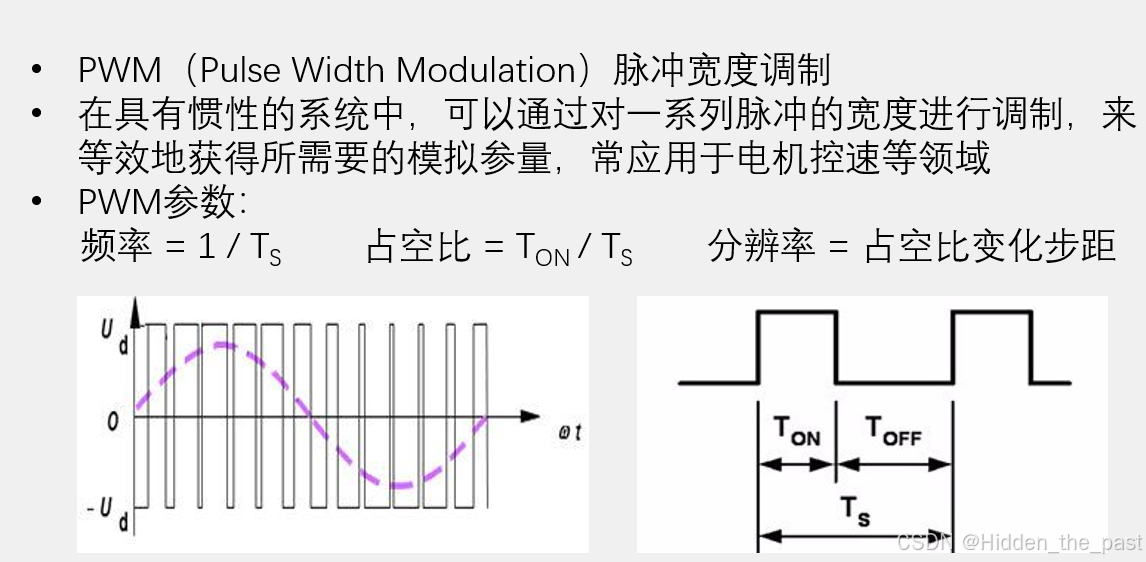
 pwm需要在惯性系统中使用 给人的感觉就是 “ 天下武功,唯快不破”;
pwm需要在惯性系统中使用 给人的感觉就是 “ 天下武功,唯快不破”;
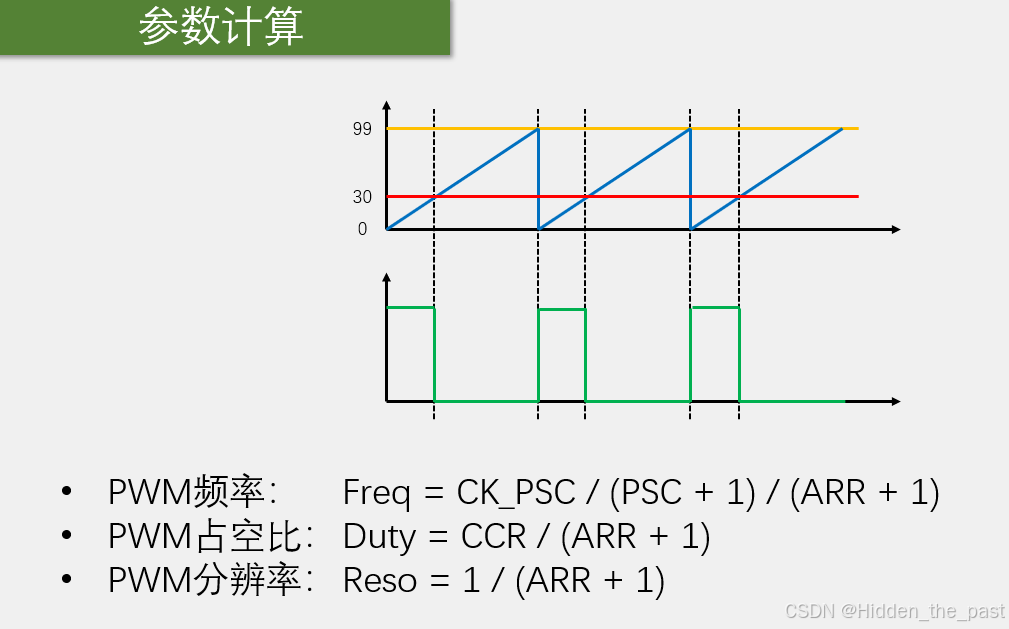
PWM的频率和和计数器溢出频率一样,计算公式如上图
定时器的输出比较通道如下:
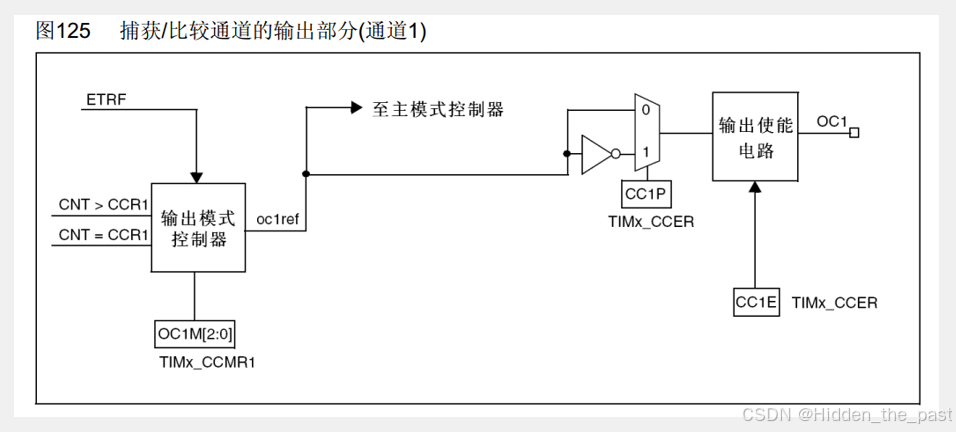
通过CNT和CRR的值不断比较,通过输出模式控制器来输出oc1ref,可以把ref 映射到主模式的TRGO输出上去,还可以在CC1P中选择是否输出高低电平反转的信号,即极性选择 ,然后再选择是否使能输出,最后时OC1引脚,CH1通道的引脚,可以通过引脚定义表来知道具体是那个GPIO口;
输出模式控制器的状态有:
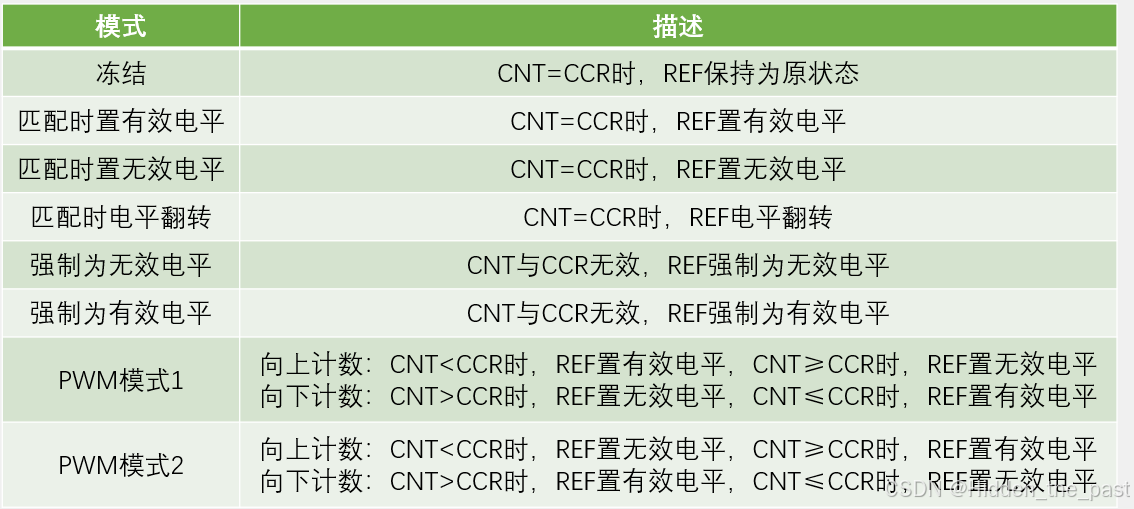
匹配时电平反转:可以通过设置这个来设置一个占空比50%的波形;
冻结,强制输出有效电平和无效电平 可以用于 想暂停波形输出,想在暂停期间保持低电平和高电平,或原状态,可以来设置
匹配时置有效,无效电平,都是一次性的信号,不适合输出连续变化的波形;
PWM模式 ,可用于输出频率和占空比都可调的PWM波形, 还要看计数器的计数模式
PWM模式1和2,基本思想一样;
这里用PWM模式1,向上计数来说明:
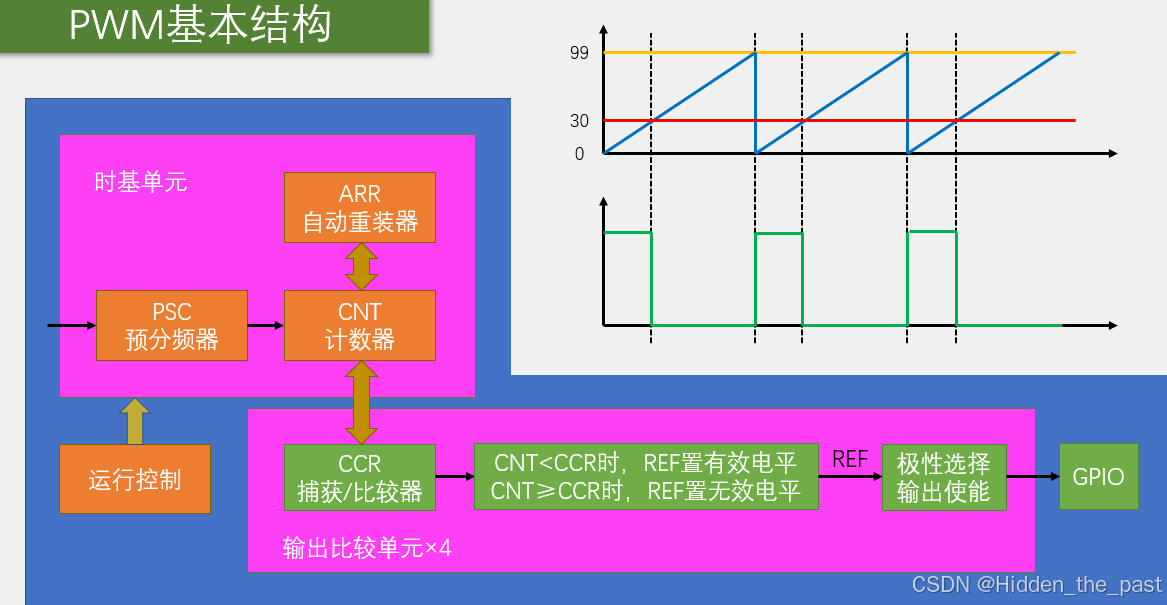
图中:黄线:ARR 红线:CCR 蓝线:CNT 绿线:REF波形
时基单元中的CNT和CCR,不断比较, 可以看出 占空比 是受CCR值的控制的
高级定时器中:
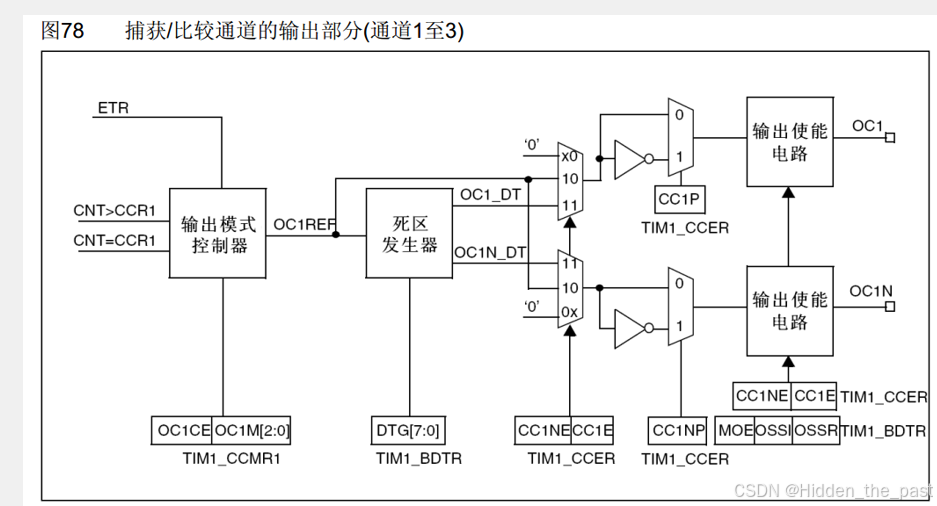
oc1 和 oc1N是互补输出,这和外面所接的电路有关系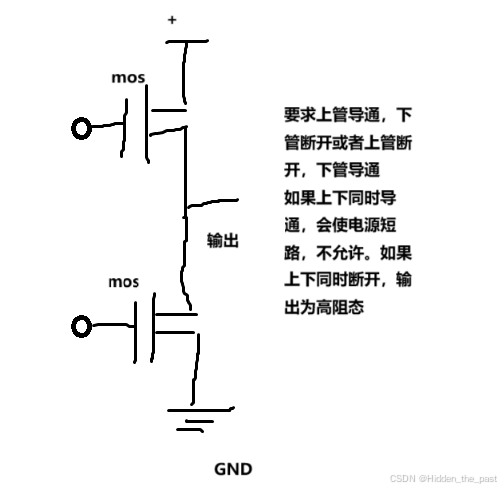
如果在上管关闭的瞬间,下管立刻就打开,可能由于器件的不理想,上管还没有完全关断,下管就已经打开了,引起器件发热,所以高级定时器有一个死区生成电路,它会在上官关闭的时候,延迟一小段时间,在导通下管;或者在下管关闭的时候,延时一小段时间,开启上管避免上下管同时导通的现象了。

















 241
241

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









