




- CPU性能的查看:看架构代际、核心数、线程数
- GPU性能的查看:看显存、看级别、看架构代际
- GPU训练的方法:数据和模型移动到GPU device上
- 类的call方法:为什么定义前向传播时可以直接写作self.fc1(x)
ps:在训练过程中可以在命令行输入nvida-smi查看显存占用情况
先简单回顾昨天学习的简单神经网络流程:
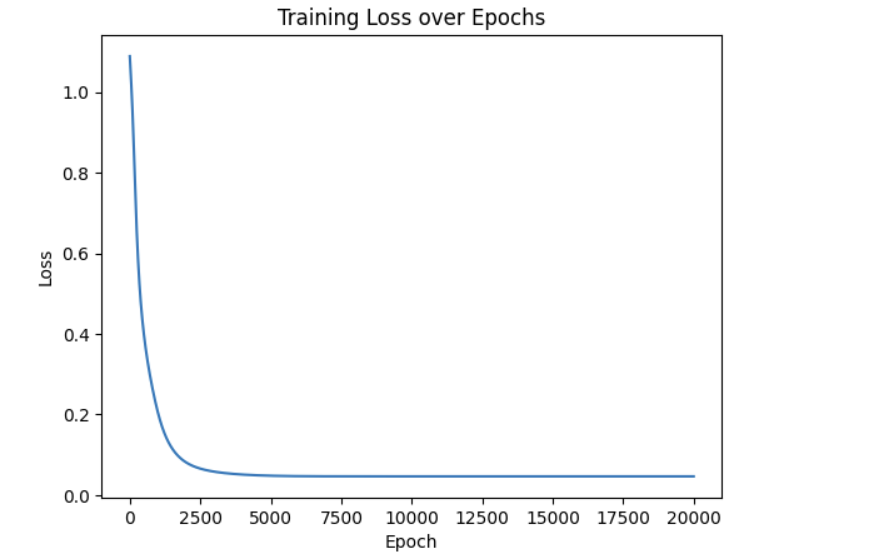
(1)准备数据(2)数据预处理:归一化、张量转换(3)模型框架定义:继承类;定义输出层/隐藏层/输入层;前向传播(3)损失函数和优化器的创建(4)循环训练:确定训练轮数;循环内部过程(forward,loss,backward,step)(5)可视化损失函数,查看收敛情况
CPU和GPU性能查看
【深度学习小常识】CPU(中央处理器)和GPU(图像处理器)的区别
CPU
import wmi
c = wmi.WMI()
processors = c.Win32_Processor()
for processor in processors:
print(f"CPU 型号: {processor.Name}")
print(f"核心数: {processor.NumberOfCores}")
print(f"线程数: {processor.NumberOfLogicalProcessors}")
GPU
GPU训练
GPU的并行计算能力强,训练神经网络可以提速10-100倍。要想让模型在GPU上训练,需要将模型和数据(张量)迁移到GPU设备上,使用的方法是.to(device)。
考虑到代码的可移植性和鲁棒性(不是所有人都有GPU),使用如下写法,确定device设备:
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(f"使用设备: {device}")模型/数据迁移
确定好设备后,就需要将数据和模型迁移至设备上。需要注意的是,所有需要在GPU/CPU上做计算的核心对象都支持.to(device),如Tensor(张量)及子类、nn.Module及子类(模型,并且要保证这些对象迁移到同一个设备上。
#张量转换,迁移至GPU
X_train = torch.FloatTensor(X_train).to(device)
X_test = torch.FloatTensor(X_test).to(device)
y_train = torch.LongTensor(y_train).to(device)
y_test = torch.LongTensor(y_test).to(device)
#实例化,迁移至设备
model = MLP().to(device)
完整版
# GPU版本
from sklearn.datasets import load_iris
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import MinMaxScaler
import torch
import torch.nn as nn
import torch.optim as optim
# 设置设备
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
print(f'使用的设备:{device}')
# 数据准备
iris = load_iris()
X = iris.data # 特征
y = iris.target # 标签
X_train,X_test,y_train,y_test = train_test_split(X,y,test_size=0.2,random_state=42) # 划分数据集
# 数据预处理
#归一化
scaler = MinMaxScaler()
X_train = scaler.fit_transform(X_train)
X_test = scaler.transform(X_test)
#张量转换,迁移至GPU
X_train = torch.FloatTensor(X_train).to(device)
X_test = torch.FloatTensor(X_test).to(device)
y_train = torch.LongTensor(y_train).to(device)
y_test = torch.LongTensor(y_test).to(device)
# 模型框架定义
class MLP(nn.Module): # 继承nn.Module类
def __init__(self): # 初始化
super(MLP,self).__init__() #调用父类方法
#定义每一层
self.fc1 = nn.Linear(4,10)
self.relu = nn.ReLU()
self.fc2 = nn.Linear(10,3)
#定义前向传播
def forward(self,x):
out = self.fc1(x)
out = self.relu(out)
out = self.fc2(out)
return out
#实例化,迁移至设备
model = MLP().to(device)
# 损失函数和优化器
criterion = nn.CrossEntropyLoss() # 损失函数
optimiser = optim.SGD(model.parameters(), lr=0.01) # SGD
#optimiser = optim.Adam(model.parameters(),lr=0.001) # Adam
# 循环训练
epoch_num = 20000 # 训练轮数
losses = []
import time
start_time = time.time()
for epoch in range(epoch_num):
output = model(X_train) # 隐式调用forward方法
loss = criterion(output,y_train)
#反向传播
optimiser.zero_grad() # 清零
loss.backward() # 反向传播计算梯度
optimiser.step() # 更新参数
# 记录loss值
losses.append(loss.item())
# 打印
if (epoch + 1) % 100 == 0: # range是从0开始,所以epoch+1是从当前epoch开始,每100个epoch打印一次
print(f'Epoch [{epoch+1}/{epoch_num}], Loss: {loss.item():.4f}')
time_all = time.time() - start_time # 计算训练时间
print(f'The training time of CPU: {time_all:.2f} seconds')
# 可视化
import matplotlib.pyplot as plt
plt.plot(list(range(epoch_num)),losses)
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.title('Training Loss over Epochs')
plt.show()
Adam优化器:
计算开销
租用云服务器RTX-4090,CPU版本用时4.15s,GPU版本用时9.59s。
对于极小的数据集(如鸢尾花数据),CPU的运行速度快于GPU,主要是因为GPU运行时存在固定的计算开销:
- 数据传输开销:CPU 内存 ↔ GPU 显存之间的数据拷贝。GPU计算前,数据从RAM到VRAM;结果返回时,从GPU到CPU,比如loss.item()(把标量从GPU到CPU,触发同步)
- 核心启动开销:GPU 执行的每个操作(Linear + ReLU + Linear)都涉及到在 GPU 上启动一个“核心”(kernel)——一个在 GPU 众多计算单元上运行的小程序,存在固定开销。
- 性能浪费:数据量太少时,GPU的很多计算单元都没有被用到,即使用了全批次也没有用到的全部计算单元。
综上,对于小数据集来说,GPU固定的计算开销远大于它在速度上的提升,因此在这个情况下速度反而慢于CPU。
GPU能发挥优势的场景主要集中在大批量数据处理,能发挥并行性优势:
- 大型数据集: 例如,图像数据集成千上万张图片,每张图片维度很高。
- 大型模型: 例如,深度卷积网络 (CNNs like ResNet, VGG) 或 Transformer 模型,它们有数百万甚至数十亿的参数,计算量巨大。
- 合适的批处理大小: 能够充分利用 GPU 并行性的 batch size,不至于还有剩余的计算量没有被 GPU 处理。
- 复杂的、可并行的运算: 大量的矩阵乘法、卷积等。
优化
对于固定的流程和数据,能够优化的只有数据传输这一步了,考虑到loss.item()每次循环都会进行从GPU到CPU的过程,可能累积大量时间,从这个优化入手:
(1)直接去除,但是无法可视化,用时8.62s。
# GPU-修改版
from sklearn.datasets import load_iris
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import MinMaxScaler
import torch
import torch.nn as nn
import torch.optim as optim
# 设置设备
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
print(f'使用的设备:{device}')
# 数据准备
iris = load_iris()
X = iris.data # 特征
y = iris.target # 标签
X_train,X_test,y_train,y_test = train_test_split(X,y,test_size=0.2,random_state=42) # 划分数据集
# 数据预处理
#归一化
scaler = MinMaxScaler()
X_train = scaler.fit_transform(X_train)
X_test = scaler.transform(X_test)
#张量转换,迁移至GPU
X_train = torch.FloatTensor(X_train).to(device)
X_test = torch.FloatTensor(X_test).to(device)
y_train = torch.LongTensor(y_train).to(device)
y_test = torch.LongTensor(y_test).to(device)
# 模型框架定义
class MLP(nn.Module): # 继承nn.Module类
def __init__(self): # 初始化
super(MLP,self).__init__() #调用父类方法
#定义每一层
self.fc1 = nn.Linear(4,10)
self.relu = nn.ReLU()
self.fc2 = nn.Linear(10,3)
#定义前向传播
def forward(self,x):
out = self.fc1(x)
out = self.relu(out)
out = self.fc2(out)
return out
#实例化,迁移至设备
model = MLP().to(device)
# 损失函数和优化器
criterion = nn.CrossEntropyLoss() # 损失函数
optimiser = optim.SGD(model.parameters(), lr=0.01) # SGD
#optimiser = optim.Adam(model.parameters(),lr=0.001) # Adam
# 循环训练
epoch_num = 20000 # 训练轮数
losses = []
import time
start_time = time.time()
for epoch in range(epoch_num):
output = model(X_train) # 隐式调用forward方法
loss = criterion(output,y_train)
#反向传播
optimiser.zero_grad() # 清零
loss.backward() # 反向传播计算梯度
optimiser.step() # 更新参数
# 记录loss值
#losses.append(loss.item())
# 打印
if (epoch + 1) % 100 == 0: # range是从0开始,所以epoch+1是从当前epoch开始,每100个epoch打印一次
print(f'Epoch [{epoch+1}/{epoch_num}], Loss: {loss.item():.4f}')
time_all = time.time() - start_time # 计算训练时间
print(f'The training time of CPU: {time_all:.2f} seconds')
# 可视化(2)减少次数访问(保留可视化),每隔N步记录一次(间隔200)
# GPU-修改版
from sklearn.datasets import load_iris
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import MinMaxScaler
import torch
import torch.nn as nn
import torch.optim as optim
# 设置设备
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
print(f'使用的设备:{device}')
# 数据准备
iris = load_iris()
X = iris.data # 特征
y = iris.target # 标签
X_train,X_test,y_train,y_test = train_test_split(X,y,test_size=0.2,random_state=42) # 划分数据集
# 数据预处理
#归一化
scaler = MinMaxScaler()
X_train = scaler.fit_transform(X_train)
X_test = scaler.transform(X_test)
#张量转换,迁移至GPU
X_train = torch.FloatTensor(X_train).to(device)
X_test = torch.FloatTensor(X_test).to(device)
y_train = torch.LongTensor(y_train).to(device)
y_test = torch.LongTensor(y_test).to(device)
# 模型框架定义
class MLP(nn.Module): # 继承nn.Module类
def __init__(self): # 初始化
super(MLP,self).__init__() #调用父类方法
#定义每一层
self.fc1 = nn.Linear(4,10)
self.relu = nn.ReLU()
self.fc2 = nn.Linear(10,3)
#定义前向传播
def forward(self,x):
out = self.fc1(x)
out = self.relu(out)
out = self.fc2(out)
return out
#实例化,迁移至设备
model = MLP().to(device)
# 损失函数和优化器
criterion = nn.CrossEntropyLoss() # 损失函数
optimiser = optim.SGD(model.parameters(), lr=0.01) # SGD
#optimiser = optim.Adam(model.parameters(),lr=0.001) # Adam
# 循环训练
epoch_num = 20000 # 训练轮数
losses = []
import time
start_time = time.time()
for epoch in range(epoch_num):
output = model(X_train) # 隐式调用forward方法
loss = criterion(output,y_train)
#反向传播
optimiser.zero_grad() # 清零
loss.backward() # 反向传播计算梯度
optimiser.step() # 更新参数
# 打印
if (epoch + 1) % 100 == 0: # range是从0开始,所以epoch+1是从当前epoch开始,每100个epoch打印一次
print(f'Epoch [{epoch+1}/{epoch_num}], Loss: {loss.item():.4f}')
# 记录loss值
if (epoch + 1) % 200 == 0:
losses.append(loss.item()) # item()方法返回一个Python数值,loss是一个标量张量
time_all = time.time() - start_time # 计算训练时间
print(f'The training time of CPU: {time_all:.2f} seconds')
# 可视化
import matplotlib.pyplot as plt
plt.plot(range(len(losses)), losses)
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.title('Training Loss over Epochs')
plt.show()
(3)记录间隔和时长的关系
| 版本 | 时间(SGD) | 时间(Adam) |
| CPU | 4.53 s | 7.49 s |
| GPU | 9.37 s | 12.27 s |
| GPU-1 | 8.81 s | 12.59 s |
| GPU-2 | 9.29 s | 11.01 s |
| 记录间隔(轮) | 200 | 400 | 500 | 800 | 1000 | 1250 | 2000 |
| 记录次数(次) | 100 | 50 | 40 | 25 | 20 | 16 | 10 |
| 时间 | 9.29 s | 9.00 s | 8.96 s | 8.97 s | 9.10 s | 9.13 s | 8.69 s |
总体上,呈现的是记录间隔越大,时间越短的规律。根本原因是loss.item() 触发 GPU-CPU 同步(gpu需要等待cpu完成才能开启下次运算),记录间隔越小 → loss.item() 越频繁 → 同步越多 → GPU 利用率下降 → 总时间增加。
但是存在波动,存在其它因素影响(AI分析):
| 因素 | 说明 | 是否导致波动 |
|---|---|---|
.item() 同步开销 | 每次调用阻塞 GPU,耗时约 1~10 μs | 主导趋势 |
| GPU 调度随机性 | CUDA kernel 启动顺序、资源竞争等 | 导致微小波动 |
| 显存访问模式 | 不同 batch 或 epoch 下缓存命中率不同 | 影响性能 |
| PyTorch 缓存分配器行为 | 首次分配 vs 再利用显存 | 可能引入差异 |
| 系统负载变化 | 其他进程占用 GPU/CPU/内存 | 外部干扰 |
魔术方法__call__
在定义模型的基本框架时,可以注意到,self.fc1 = nn.Linear(4, 10) 此时,是实例化了一个nn.Linear(4, 10)对象,并把这个对象赋值给了MLP的初始化函数中的self.fc1变量。然后, out = self.fc1(x),这个self.fc1这个变量却实现了函数的用法?
这是因为nn.Linear继承了nn.Module类,nn.Module类中定义了__call__方法。PyTorch 中几乎所有层(nn.Linear, nn.ReLU, nn.Conv2d 等)都是 nn.Module 的子类,所以它们的实例也都有__call__方法,可以像函数一样调用。
__call__方法:让实例对象像函数一样被调用。不管有没有参数,只要有call方法,那么实例对象就可以像函数一样被使用。
class Adder:
def __init__(self):
self.count = 0
#def __call__(self): # 无参数的call方法,在每次调用实例后自动触发
#self.count += 1
return self.count
def __call__(self, a, b): # 有参数的call方法
return a + b
add = Adder() # 创建实例对象
result = add(3, 4) # 看起来像调用函数
print(result) # 输出: 7
#add_test = Adder()
#print(add_test()) # 若无参数,则自动调用

















 2381
2381

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









