




 本文介绍了如何在ROS环境下使用turtlebot3和gazebo进行SLAM(同时定位与建图)仿真,通过gmapping算法建立地图,并实现键盘控制小车扫图。随后,文章详细讲述了如何保存地图并进行自主导航的模拟过程。
本文介绍了如何在ROS环境下使用turtlebot3和gazebo进行SLAM(同时定位与建图)仿真,通过gmapping算法建立地图,并实现键盘控制小车扫图。随后,文章详细讲述了如何保存地图并进行自主导航的模拟过程。
先在.bashrc文件中加入
export TURTLEBOT3_MODEL=waffle_pi启动turtlebot3小车
roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch用键盘控制小车:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
========================
开启仿真
roslaunch turtlebot3_gazebo turtlebot3_house.launch
开启slam,建图算法选择gmapping
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping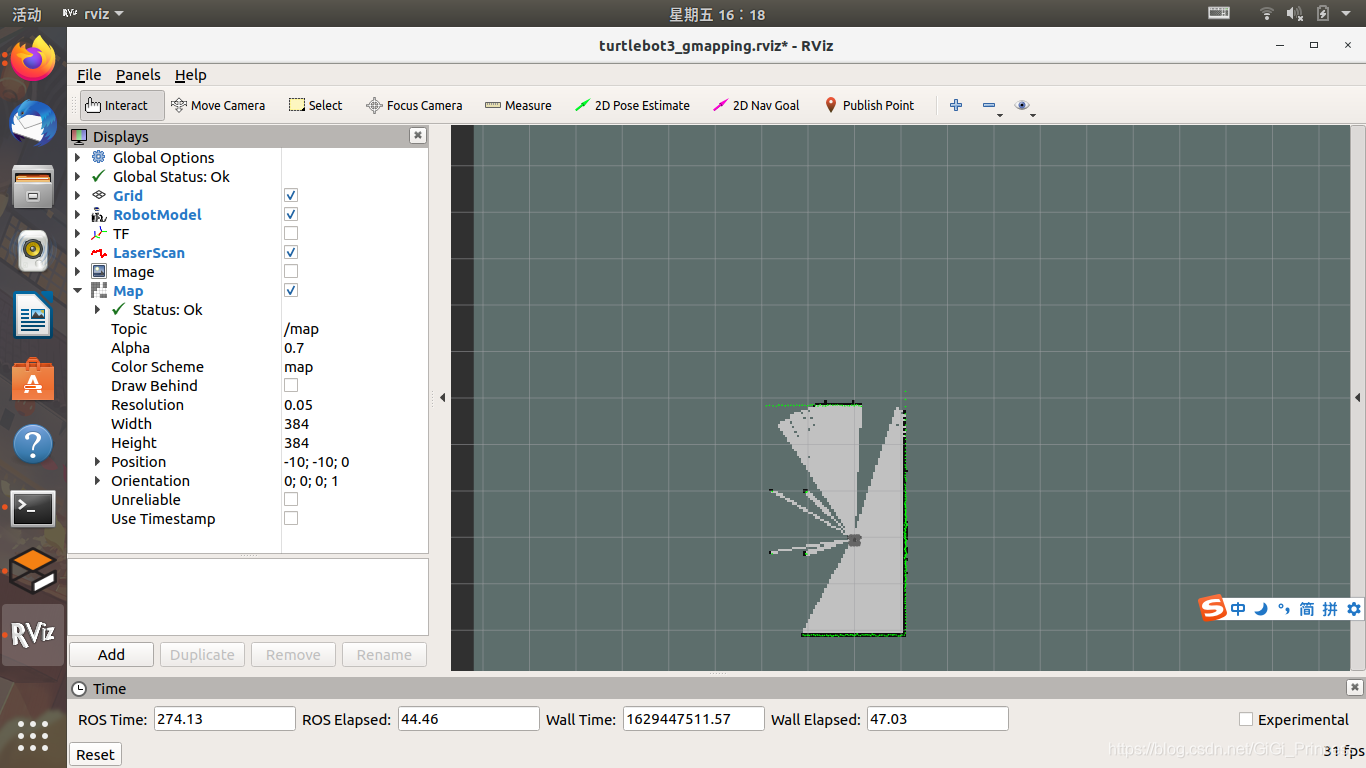
启动键盘控制节点,扫出地图
roslaunch turtle 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5257
5257




 到【灌水乐园】发言
到【灌水乐园】发言







