







 超级会员免费看
超级会员免费看
 FCW前向碰撞报警系统通过车头的雷达监测与前车的距离和速度,当存在碰撞风险时,会警告驾驶者。FCW实现包括车辆识别、车距检测和安全车距预警模型。常见应用场景主要预防追尾事故,但其效果受环境因素、技术实现和驾驶者反应等多种因素影响。
FCW前向碰撞报警系统通过车头的雷达监测与前车的距离和速度,当存在碰撞风险时,会警告驾驶者。FCW实现包括车辆识别、车距检测和安全车距预警模型。常见应用场景主要预防追尾事故,但其效果受环境因素、技术实现和驾驶者反应等多种因素影响。
FCW 前向碰撞报警系统
前向碰撞预警系统(Forward Collision Warning,FCW),可检测前车的运动状态,当有碰撞的危险时,可向驾驶员发出警告。
由安装在车头的雷达,侦测自车和前方车辆的距离及速度,初期会发出警告声来提醒驾驶人注意车距,若车距依然持续拉近,车辆便会先自动轻踩刹车,并轻拉安全带2-3次,警告驾驶人,若系统判定追撞是没办法避免时,启动自动紧急刹车(AEB)后,会同时立刻拉紧安全带固定驾驶人,降低意外发生后的伤害。
现在,FCW功能已经成为ADAS系统常见的标准配置。
演示系统见这里
FCW实现原理详解
首先,通过分析传感器获取的前方道路信息对前方车辆进行识别和跟踪,如果有车辆被识别出来,则对前方车距进行测量。同时利用车速估计,根据安全车距预警模型判断追尾可能,一旦存在追尾危险,便根据预警规则及时给予驾驶人主动预警。
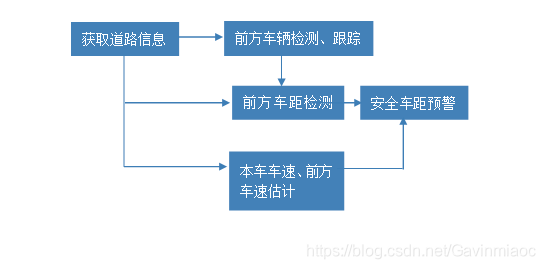
图1 FCW系统实现原理
具体来说,我们可以将以上过程分为三个部分。
1)前方车辆识别
2)前方车距检测
3)建立安全车距预警模型
1、前方车辆

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 4977
4977

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









