




 本文介绍了ROS作为机器人开发平台的重要性,详细解析了其分布式通信机制及其系统结构,包括节点通信原理和用户工作空间等内容。
本文介绍了ROS作为机器人开发平台的重要性,详细解析了其分布式通信机制及其系统结构,包括节点通信原理和用户工作空间等内容。
操作系统选择
使用ROS进行机器人开发一般需要机器人和工作台两部分。在实际机器人之上运行的SLAM的性能(比如功耗、实时性、兼容性等)大多与机器人主机硬件架构及操作系统有关。

什么是ros
面试就说ros机器人开发平台。
分布式通信≈进程通信+网络通信。
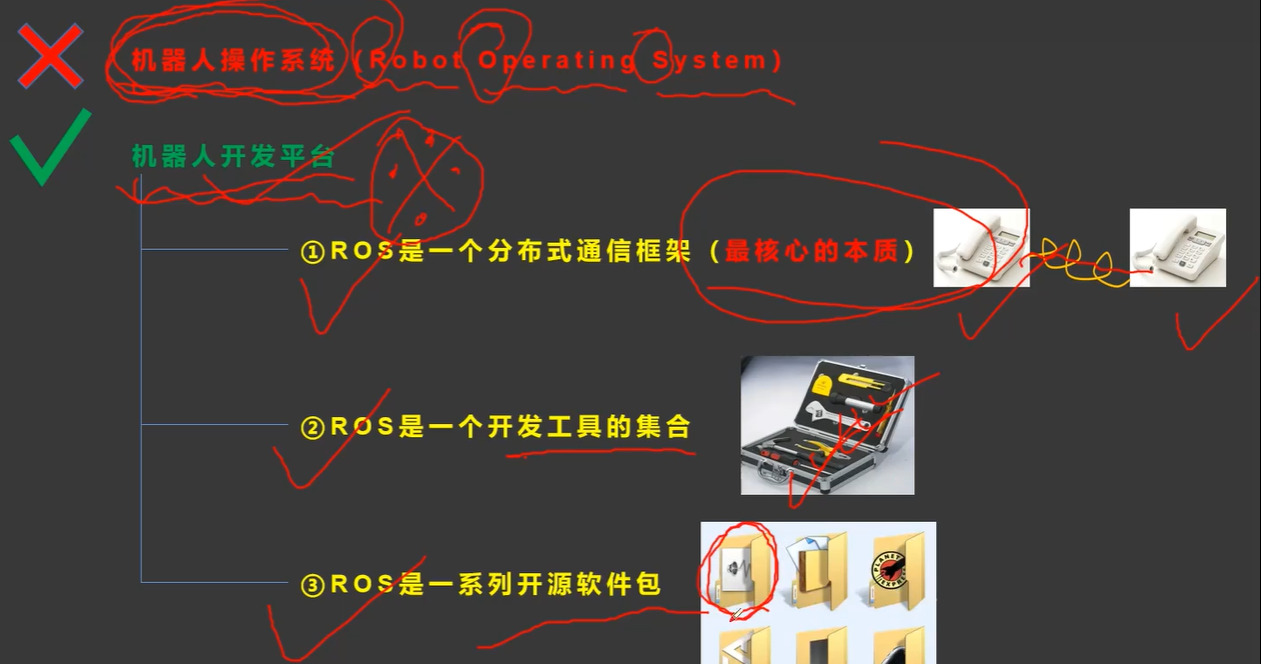
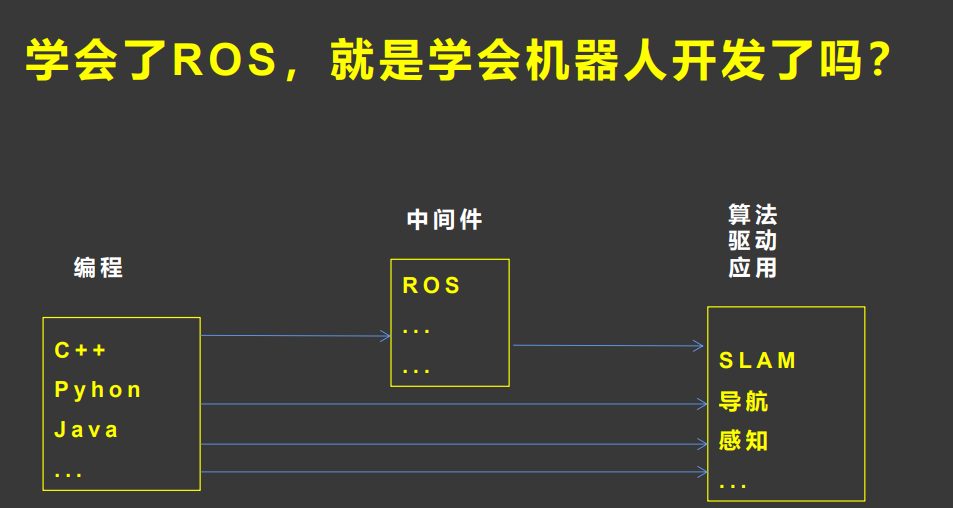
ros只是一个中间件。机器人开发基于slam的应用比较方便。像redis一样,你可以不用,只用mybatis。
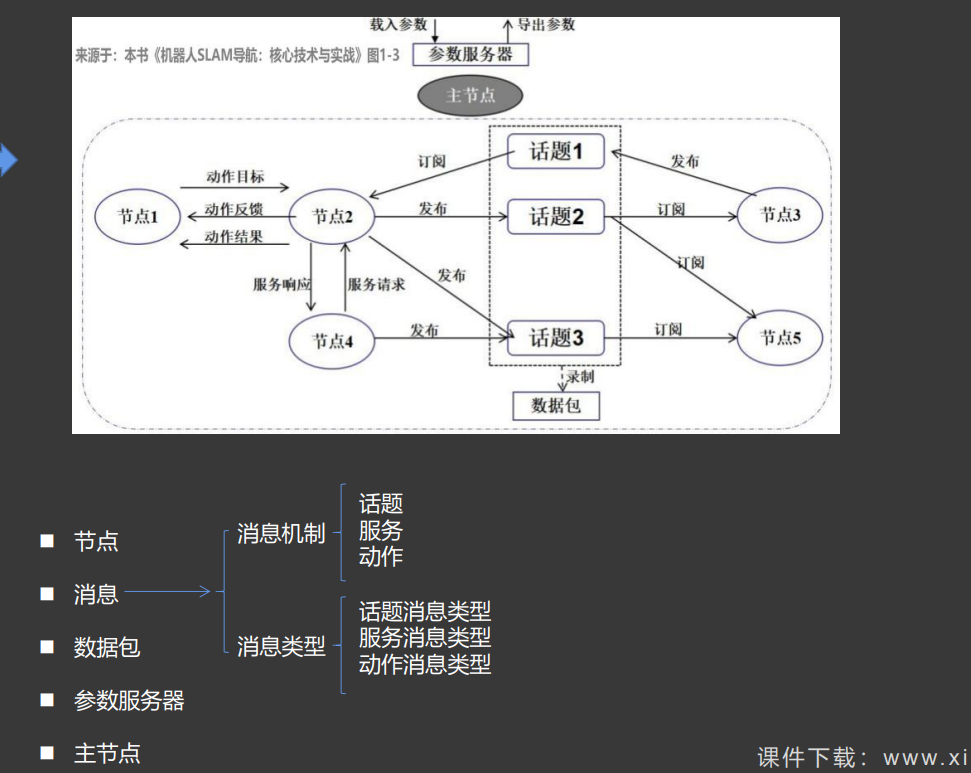
ros系统结构
计算图
ros中节可以理解成进程。节点间的通信可以理解成进程通信。roscore就是启动主节点(master)的。
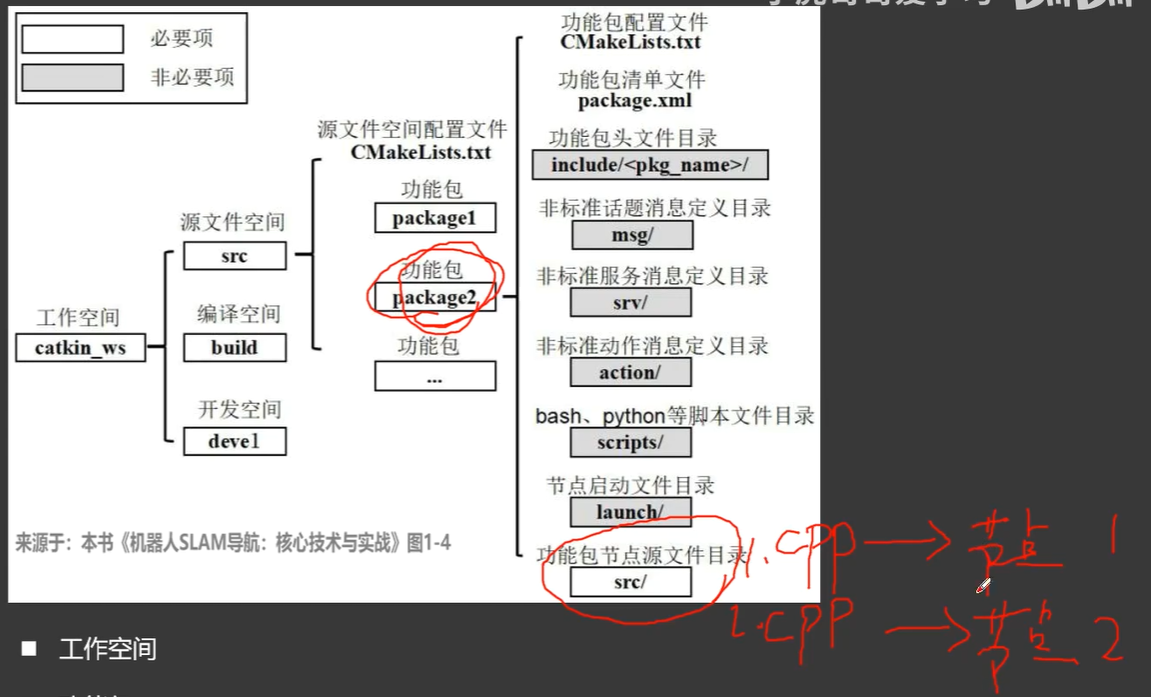
用户工作空间
下图中
1. 非标准指的是用户自定义。
2. 源文件目录cpp文件编译后就是节点。
3. rosrun rviz rviz 这个命令第一个rviz是功能包,第二个是节点。
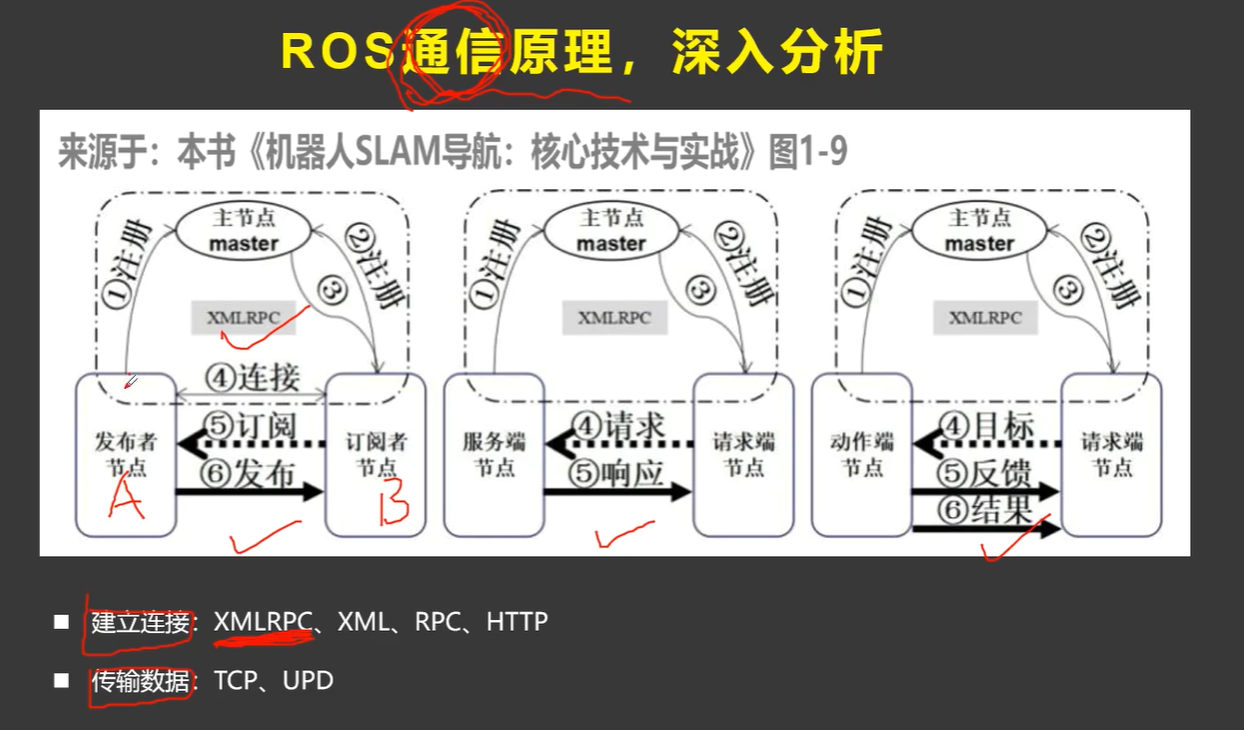
节点通信原理
RPC(remote procedure call 远程程序调用) RPC解释很好
1. 解决分布式系统中,服务之间的调用问题。
2. 远程调用时,要能够像本地调用一样方便,让调用者感知不到远程调用的逻辑。
这也和前面说rpc是分布式通信框架相联系,让一个节点可以调用另一个节点的函数。

















 2151
2151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









