




Reference line一般是离散点,如下图所示,故投影点为近似投影。
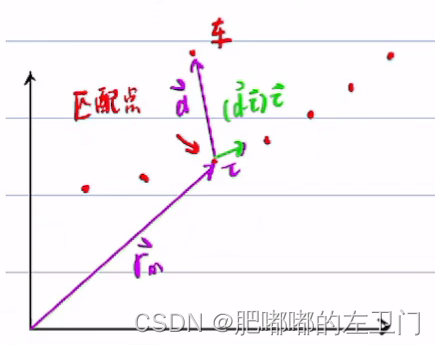
投影点求解分3步:
1,在Reference line上找距离车辆最近的点,作为匹配点match point,其直角坐标系下的坐标记为。其中,
为航向角,
为曲率。
2,主车坐标为,求向量
,
。
 本文介绍如何通过3步骤解决车辆投影问题:首先确定最近匹配点,然后利用航向角和曲率计算主车向量,最后应用公式近似得到投影点的航向角和曲率。关键概念包括曲率定义和投影点的求解过程。
本文介绍如何通过3步骤解决车辆投影问题:首先确定最近匹配点,然后利用航向角和曲率计算主车向量,最后应用公式近似得到投影点的航向角和曲率。关键概念包括曲率定义和投影点的求解过程。
Reference line一般是离散点,如下图所示,故投影点为近似投影。
1,在Reference line上找距离车辆最近的点,作为匹配点match point,其直角坐标系下的坐标记为。其中,
为航向角,
为曲率。
2,主车坐标为,求向量
,
。
 1万+
2587
1930
574
1万+
2587
1930
574

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























