




前言
本文摘取自2025 CMMI中国大会发布的《CMMI中国区2024年度优秀实践案例》,本次的案例集相较之前的信息,丰富了执行和最终成果的细节,具备更高的参考价值和技术指导意义。

公司背景
武汉高德智感科技有限公司成立于 2016 年,是上市公司高德红外集团(SZ.002414)旗下的全资子公司,致力于为全球用户提供以红外热成像技术为核心的产品及行业解决方案。基于自主研发的红外芯片带来的低成本、批产化优势,以及二十多年来的红外应用经验,公司的产品和解决方案被广泛应用于电力、工业制造、安全监控、警用执法、户外夜视、科研和医疗等领域。

业务需求
一、业务目标包括
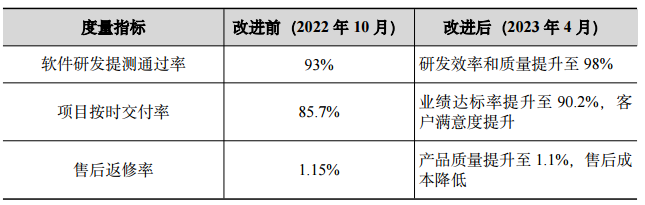
1. 项目结案按时交付率不低于 90%;
2. 售后返修率不高于 1.1%。
二、突出问题
1. 管理方面,员工能力参差不齐,项目的成败更多依赖个人能力的强弱,项目管理流程体系和技术管理流程体系不够细致,未能充分发挥体系作用;职责分工不明确,未发挥关键岗位和专家人才的作用;需求、设计、方案等评审不充分,甚至未执行;需求管理较为混乱、需求文档质量不高、需求难以对齐等等,以上这些问题,导致返工或交付质量差,影响项目的按时交付。
2. 技术方面,对于一些新引入的技术或关键器件,未作充分评估,缺乏风险管控意识,导致项目中后期技术攻关问题剧增,交付质量不高;代码管理混乱,缺乏代码走查、自测等环节,且测试环节未引入更高效的自动化测试工具和技术,测试效率难以提升,产品的缺陷率和售后返修率居高不下。
为了解决以上问题,实现业务目标,公司采用了 CMMI 实践进行过程改进,并于 2023 年 4 月通过了 CMMI3 级评估。
解决方案
一、提升项目按时交付率
1. 规范项目管理流程,定义清晰的项目阶段、里程碑和交付物,以及建立有效的风险管理机制,显著提高项目的按时交付率。
2. 增加软件需求分拆工作环节以及需求串讲和反串讲,保障目标一致性,减少返工,提升研发效率。
3. 制订完善的评审流程,开发配套的线上评审系统,成立各领域专家评审组,保障了研发过程的可控性,降低了产品研发风险,使交付过程更顺畅。
二、降低售后返修率
1. 引入代码仓库 Gitee,进行 Gitee Scan 扫描;实施代码上库前的代码检查,制定代码提交入库的准则,提升软件交付质量。
2. 引入自动化测试工具,大大提升测试效率和交付质量。
3. 通过实施定期的质量审核、建立缺陷预防机制以及持续改进过程,分析质量问题成因,制定长期措施并跟踪闭环,显著降低产品的缺陷率和售后返修率。
成果经验
高德智感建立了完善的评审机制,明确评审流程,并开发了评审系统,将相应的评审过程与模版和检查单相结合,让评审过程透明化、评审数据可视化,这使项目实施过程中大幅降低了返工的概率。规范的评审过程确保了各阶段的输出都符合预定的标准和要求,从而提高了产品质量。同时,评审过程不仅是发现问题的过程,也是知识共享和经验传承的过程。
CMMI 的实施不应是一成不变的,而应根据公司的实际情况进行灵活调整。
通过CMMI评估结果查询校验案例真实性
PARS是CMMI唯一指定的评估结果发布平台,案例真实性和评估结果可通过PARS系统查询验证。
https://www.isaca.org.cn/enterprise/cmmi-pars

















 661
661

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









