




前言
本文摘取自2025 CMMI中国大会发布的《CMMI中国区2024年度优秀实践案例》,本次的案例集相较之前的信息,丰富了执行和最终成果的细节,具备更高的参考价值和技术指导意义。

公司背景
中科软科技股份有限公司(以下简称中科软)成立于1996年,是从事计算机软件研发、应用、服务的大型专业化高新技术企业。公司以行业应用软件开发 为核心,业务涵盖应用软件、支撑软件、系统集成等应用层次,可为客户提供大型行业应用解决方案。中科软科技不断开拓创新,丰富自主研发产品内容,增强优质的服务理念,建立了极具竞争力的技术体系。经过多年的发展,公司现已将 行业应用软件产品和解决方案应用扩展至众多行业领域,并已在保险信息化以及公共卫生信息化行业细分应用领域形成领先优势,在政务信息化行业应用领域具 有丰富经验。
解决方案
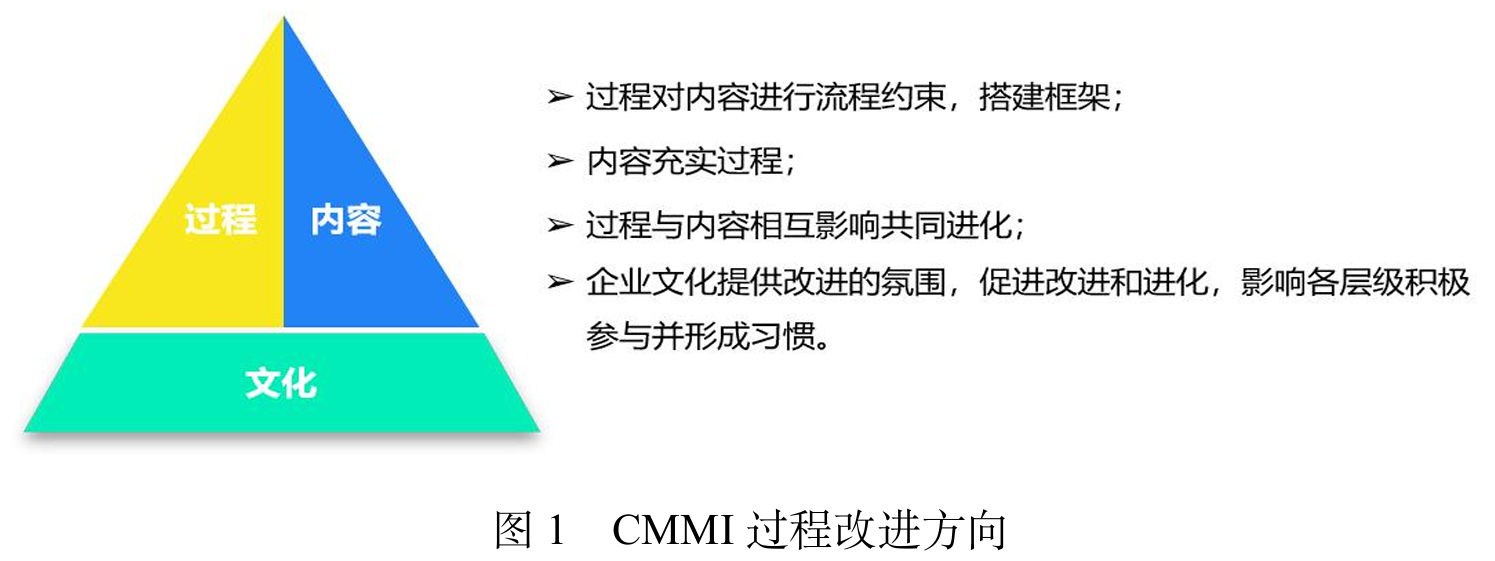
为了达成公司的业务目标,解决公司目前的问题,基于CMMI框架,中科软在过程、内容和文化三个方面进行了改进,确保及时高效地提供高质量的解决方案,从而满足客户和最终用户的需求和期望。 过程的改进为项目的实施提供了适应环境变化的标准的流程规范,内容的改进是从提供的解决方案的核心要素和框架上进行的规范和改进,企业文化提供改进氛围,促进改进和进化。
一、过程改进
1. 为了适应内外环境的变化,更加精细地管理项目,公司对项目的类型进 行了细分,定义了多种生命周期模型供项目选择,建立更加丰富的性能模型。
1)业务条线的变化:由原来的单一项目类型变成多业务条线的项目类型, 针对不同业务方向建立模型和基线;
2)模型变化:由原来的单过程模型变成综合因素模型,覆盖多个环节;
3)生命周期的变化:随着客户期望快速交付,开发节奏加快,生命周期也 从原来的单一瀑布增加了增量迭代和敏捷模型。
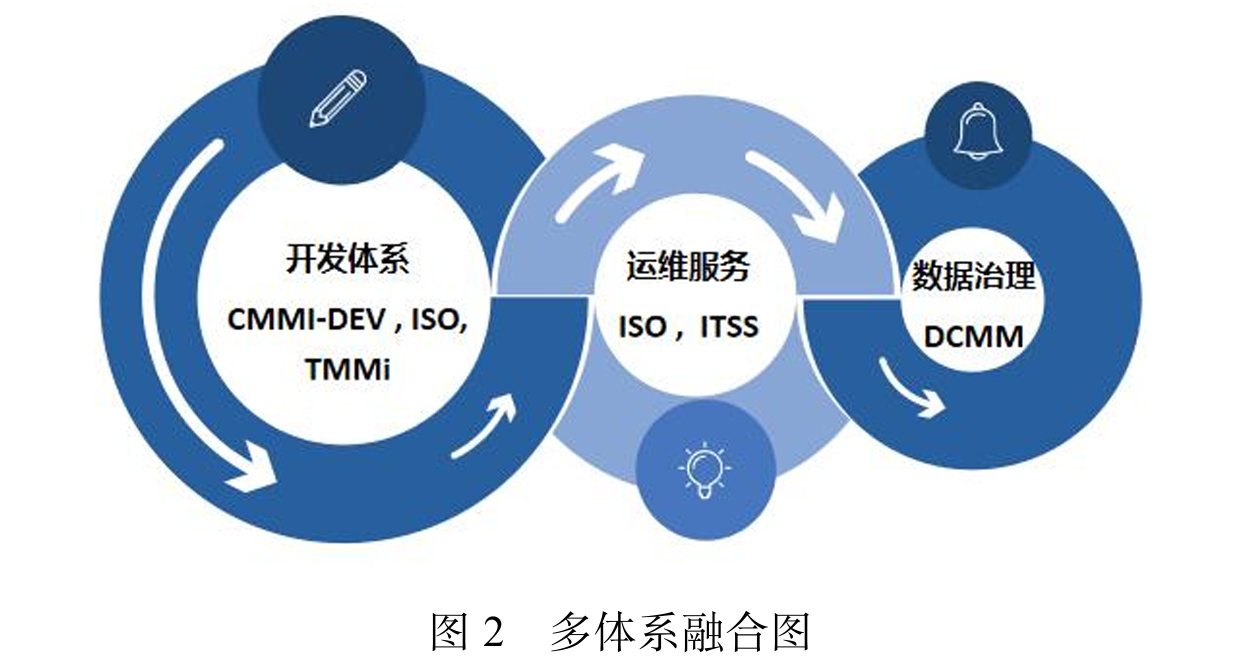
2. 多体系融合助力过程改进在项目的落地和实施。 充分利用主流体系优势,将CMMI与ISO、ITSS、DCMM等其他过方法相 结合,使公司整体运作更全面、可靠和高效,建立并使用CMMI内部基准以推 动公司持续改进,同时定期评估过程改进工作对公司长期的业务影响。
二、内容改进
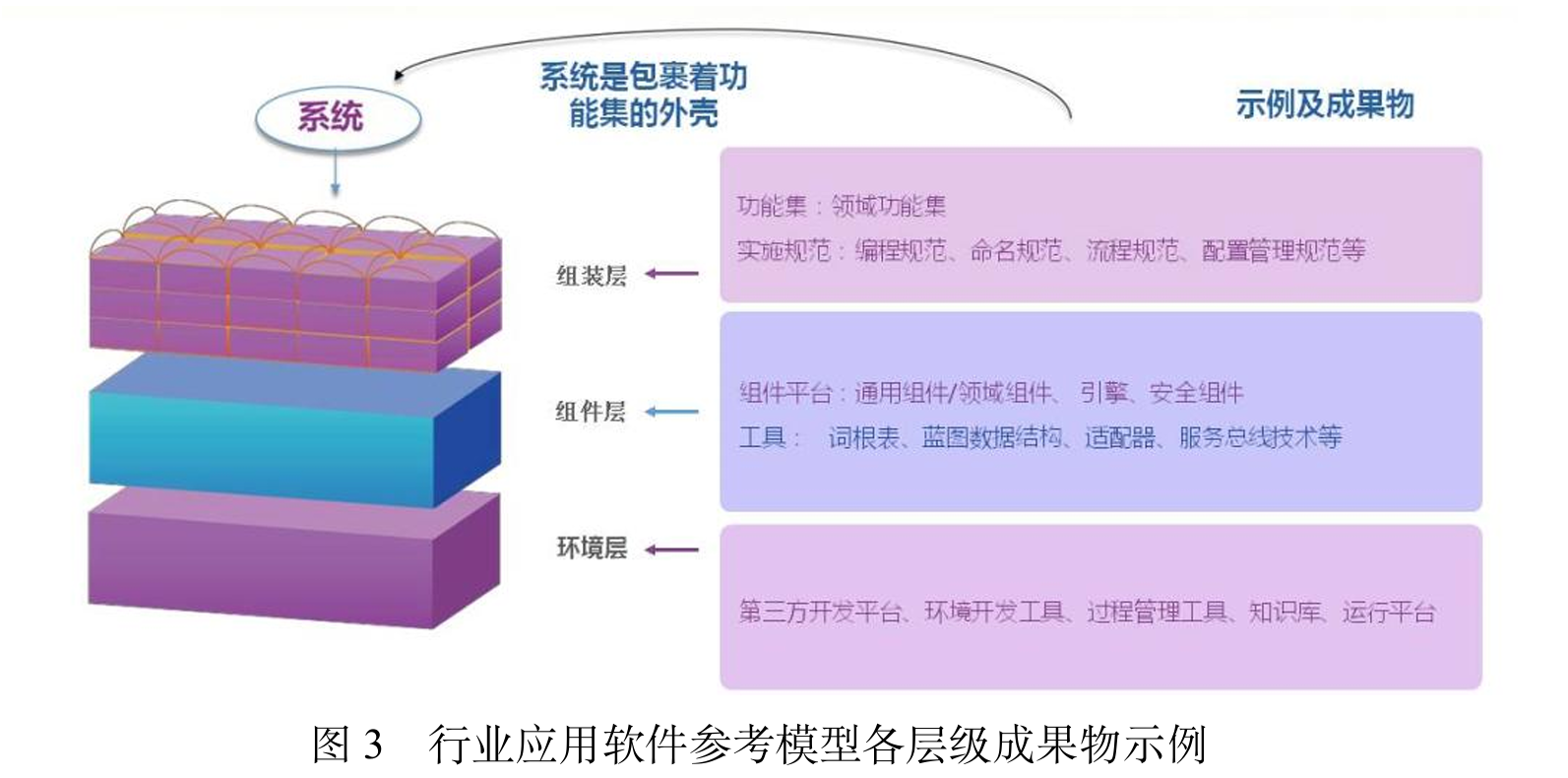
为了快速给客户提供符合环境变化的解决方案,中科软持续进行“研发核心 要素”的积累和沉淀,持续完善“行业应用软件参考模型”,其具有明确的层次划分,包括环境层、组件层、组装层。
1. 环境层。
即软件运行的基础环境,包括操作系统、中间件平台、软件开发所采用的编 程语言和集成开发环境。
2. 组件层。
包括领域组件、通用组件和工具。通用组件是能够跨领域范围内复用的组件, 领域组件指只能在某个领域范围内复用的组件。
3. 组装层。
最佳实践和个性化生成的应用系统群。通过对平台层的领域组件进行某种标 准化的组装形成最佳实践,它是该领域的通用参考模型。
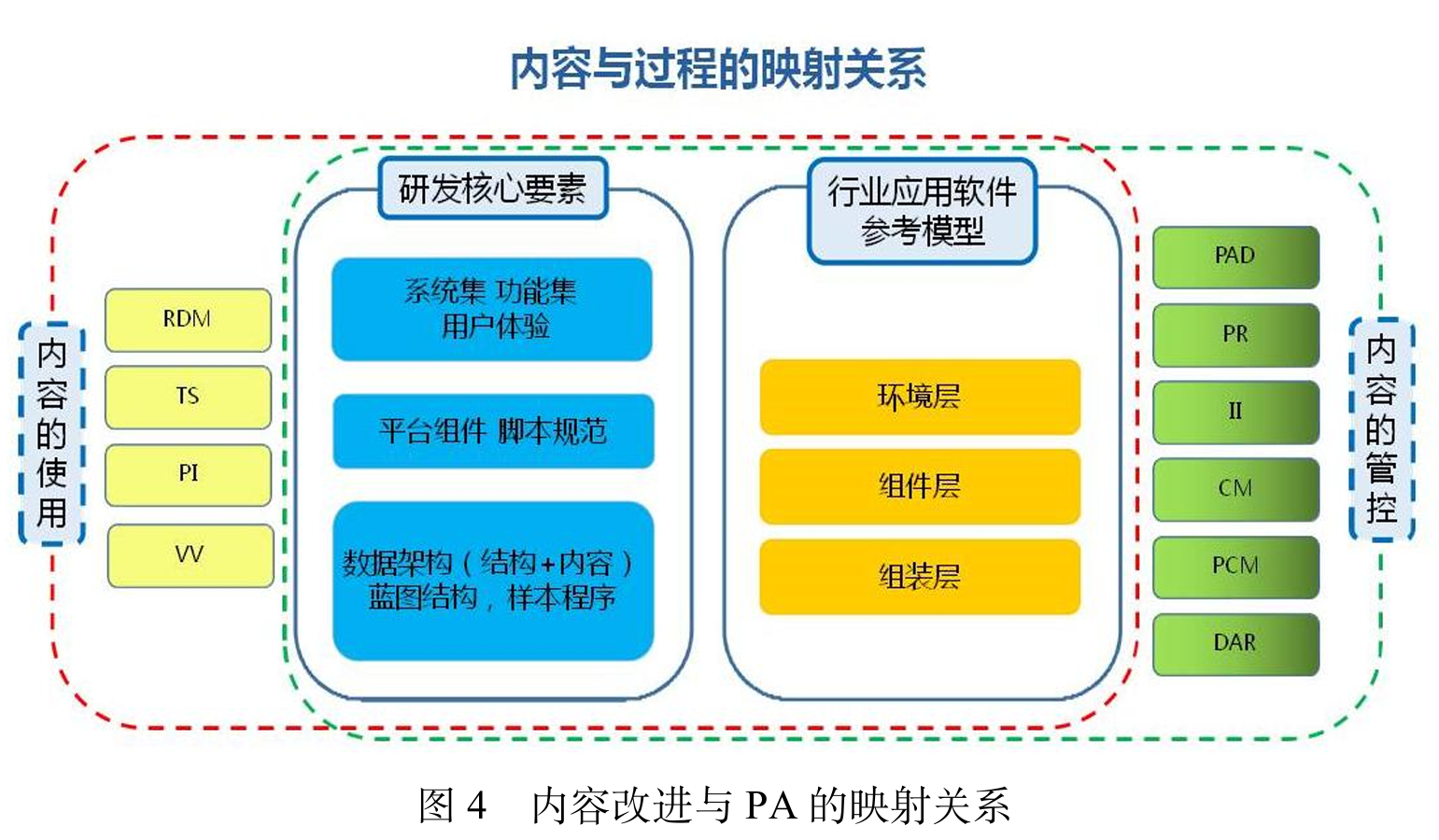
内容的改进与PA的映射关系如图4所示。
成果经验
公司为达成业务目标,首先将战略方向分解为质量、成本、效率三个核心维 度,并围绕这三个维度构建分层度量体系:基础指标保障执行基线,过程指标驱 动改进闭环,结果指标则直接匹配战略目标与客户价值。在结果指标中,公司重点锚定开发效率和产品质量作为核心抓手,通过优化流程、强化自动化测试、建 立持续集成等过程改进措施,推动过程指标的优化,最终实现开发效率与产品质 量的双重提升。
一、生产率通过比较分析,“生产率”整体水平有明显提升。其中均值由1.3860上升 到1.4470;中位值由1.4231上升到1.5237,表示整体数值向右偏移,效率提升; 标准差由0.3181降低到0.3109,反映出各项目之间的差距小幅降低。达标系数提升由0.9207明显上升至0.9608,综上所述生产率整体向好。
二、UAT缺陷密度通过比较分析,“UAT缺陷密度”整体有所下降。其中均值由0.1321下降到0.1301,中位值由0.1348下降到0.1300,标准差由0.0124下降到0.0025,达标系数由0.9265提升到1。结合所有指标综合来看,UAT缺陷密度整体变好。
通过CMMI评估结果查询校验案例真实性
PARS是CMMI唯一指定的评估结果发布平台,案例真实性和评估结果可通过PARS系统查询验证。


















 659
659

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









