







 本文详细介绍如何使用Robot Operating System (ROS)集成多种传感器,包括激光雷达、毫米波雷达、相机等,并指导如何启动各设备,调整参数如FPS,以及通过rosbag记录数据集的方法。
本文详细介绍如何使用Robot Operating System (ROS)集成多种传感器,包括激光雷达、毫米波雷达、相机等,并指导如何启动各设备,调整参数如FPS,以及通过rosbag记录数据集的方法。
- 启动全部
1. roscore
2. roslaunch All_sensors.launch
- 查看话题
rostopic list
/****************************
/as_rx/vehicle_motion
/as_tx/objects
/as_tx/radar_error_status cc
/as_tx/radar_markers
/as_tx/radar_status
/as_tx/radar_tracks
/*************************************
/******************************************
/camera/camera_info
/camera/image_raw
/camera/parameter_descriptions Mako 机机
/camera/parameter_updates
/*************************************************
/*************************************
/can_rx 毫米波雷达
/can_tx
/*************************************
/diagnostics
/*************************************××××××××××××××××××××××××××××××××××××××××××××××
/ns1/velodyne_first_nodelet_manager/bond
/ns1/velodyne_first_nodelet_manager_cloud/parameter_descriptions
/ns1/velodyne_first_nodelet_manager_cloud/parameter_updates
/ns1/velodyne_first_nodelet_manager_driver/parameter_descriptions
/ns1/velodyne_first_nodelet_manager_driver/parameter_updates
/ns1/velodyne_packets
/ns1/velodyne_points
/ns2/velodyne_packets 两个VLP16 雷达
/ns2/velodyne_points
/ns2/velodyne_second_nodelet_manager/bond
/ns2/velodyne_second_nodelet_manager_cloud/parameter_descriptions
/ns2/velodyne_second_nodelet_manager_cloud/parameter_updates
/ns2/velodyne_second_nodelet_manager_driver/parameter_descriptions
/ns2/velodyne_second_nodelet_manager_driver/parameter_updates
/*************************************××××××××××××××××××××××××××××××××××××××××××××××
/*************************************××××××××××××××××××××××××××××××××××××××××××××××
/pandar40p/sensor/pandar40p/hesai40/PointCloud2 禾赛激光雷达
/*************************************××××××××××××××××××××××××××××××××××××××××××××××
/parsed_rx/vehicle1_msgs
/parsed_rx/vehicle2_msgs
/parsed_rx/vehicle3_msgs
/parsed_rx/vehicle4_msgs
/parsed_rx/vehicle5_msgs
/parsed_tx/radarstatus1
/parsed_tx/radarstatus2
/parsed_tx/radarstatus3 毫米波雷达
/parsed_tx/radarstatus4
/parsed_tx/radarstatus5
/parsed_tx/radarstatus6
/parsed_tx/radarstatus7
/parsed_tx/radarstatus8
/parsed_tx/radarstatus9
/parsed_tx/radartrack
/parsed_tx/radarvalid1
/parsed_tx/radarvalid2
/parsed_tx/trackmotionpower
/***************************************************************************
/pylon/raw_image_1 balser 相机
/rosout
/rosout_agg
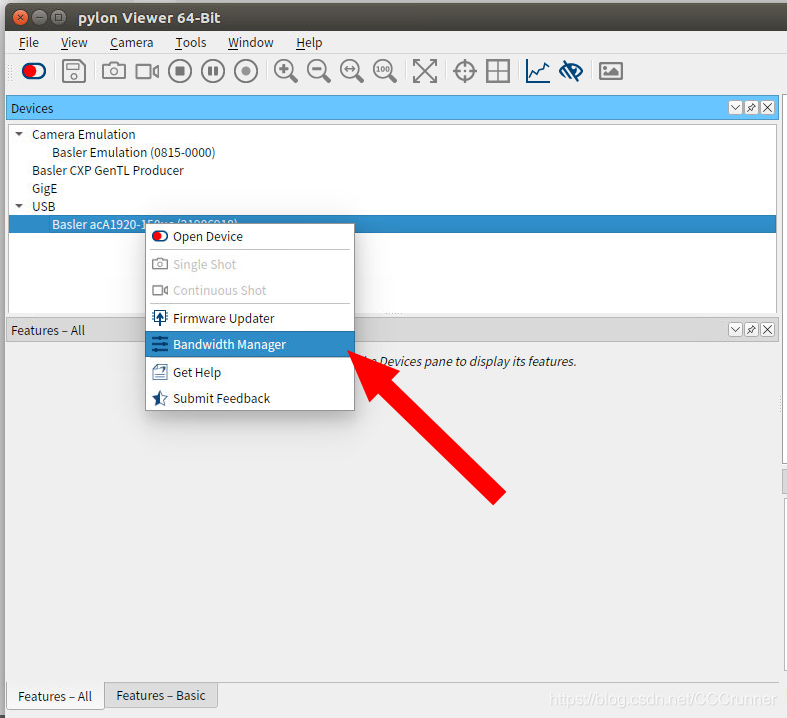
- 启动basler相机
roslaunch pylon_ros pylon_ros.launch
roslaunch pylon_ros pylon_ros_three_camera.launch
- 修改图片fps
打开pylon viewer: /home/tsinghualion/下载/pylon_6.1.1.198/pylon viewer
BandWidthManager
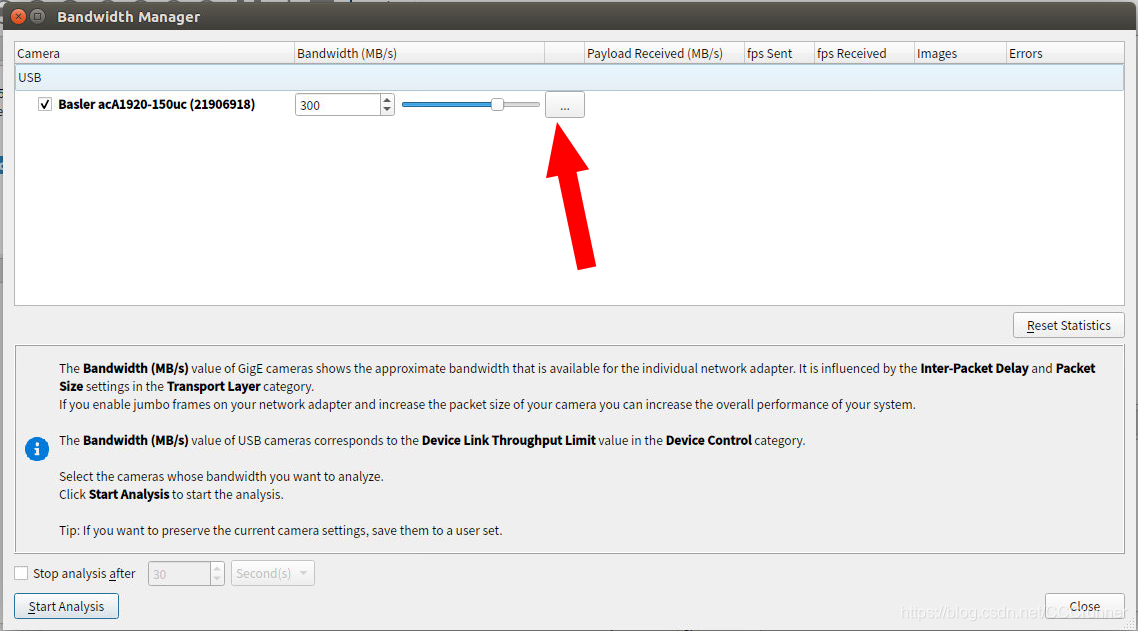
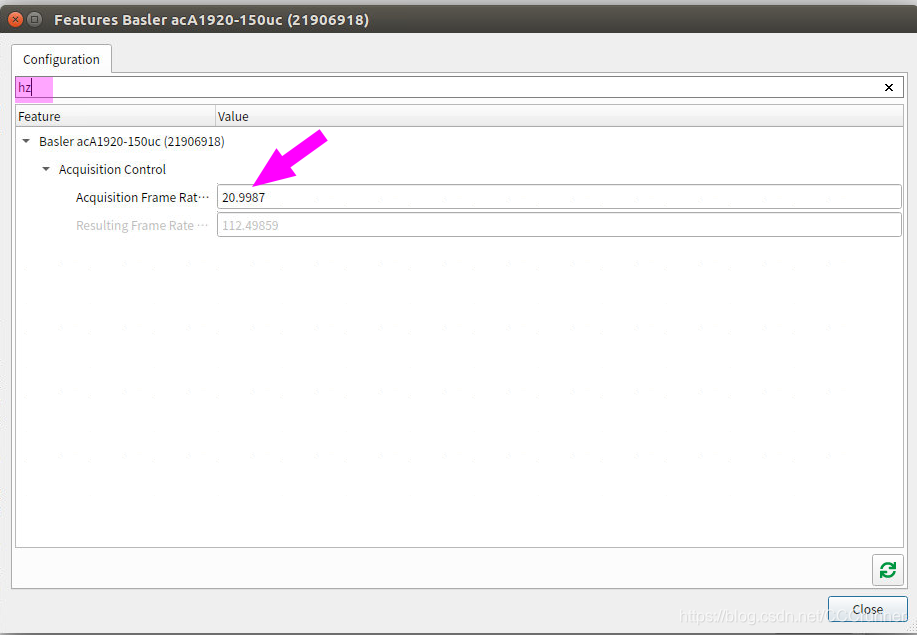
修改完fps之后,运行rostopic info <相机话题> 来看帧数是够更改。
- 启动两个VLP16雷达
roslaunch velodyne_pointcloud VLP16_points_multi.launch
启动1个VLP16雷达
roslaunch velodyne_pointcloud VLP16_points.launch
- VLP16雷达查看点云图
rviz rviz
Fix Frame velodyne
- 启动毫米波雷达
roslaunch delphi_esr delphi_esr.launch
查看
rviz rviz
fixed frame: esr_1
- 启动大疆雷达
roslaunch livox_ros_driver livox_lidar.launch
带点云图
roslaunch livox_ros_driver livox_lidar_rviz.launch
- 启动禾赛雷达
roslaunch pandar40p pandar40p_driver.launch
查看点云图
rviz rviz
Fix Frame: hesai40
- 启动Mako G-223B NIR相机
roslaunch avt_vimba_camera Mako_G-223B_NIR.launch
- 启动Mako G-192C
roslaunch avt_vimba_camera Mako_G-192C.launch
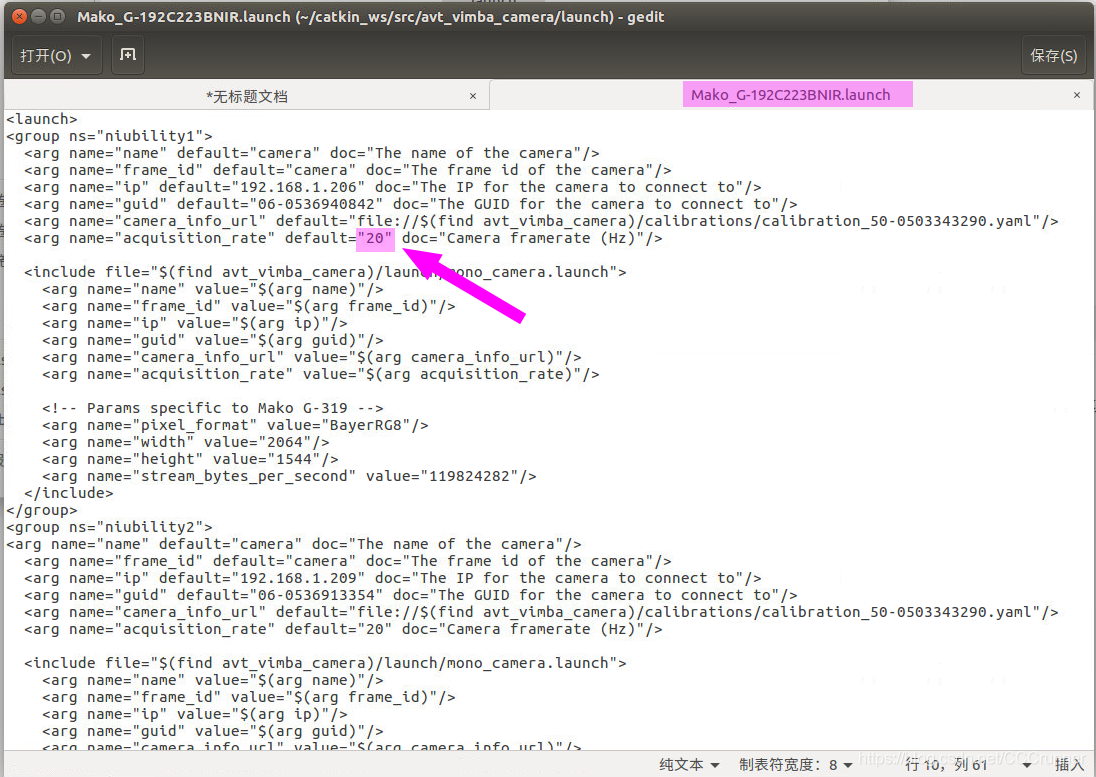
- 同时启动两个Mako相机
roslaunch avt_vimba_camera Mako_G-192C223BNIR.launch
修改相机fps
/home/tsinghualion/catkin/src/avt_vimba_camera/launch
- 采集数据集
$ rosbag record --all --duration=30 /chatter # 采集所有传感器数据,时间为30s
$ rosbag record <rostopic>--duration=5m /chatter #采集指定topic数据,时间为5分钟
前提是先启动roscore,再启动传感器,最后运行rosbag相关命令。
- 查看相关rosbag内容,命令
rosbag info <rosbag name>
更多rosbag命令,可以参考:http://wiki.ros.org/rosbag/Commandline
启动速腾Ruby
roslaunch rslidar_sdk start.launch
tiaoj 速腾雷达线束降维
速腾雷达线束降维
 打开Viewer之后,全屏放大才能显示
打开Viewer之后,全屏放大才能显示File Tools Help选项。
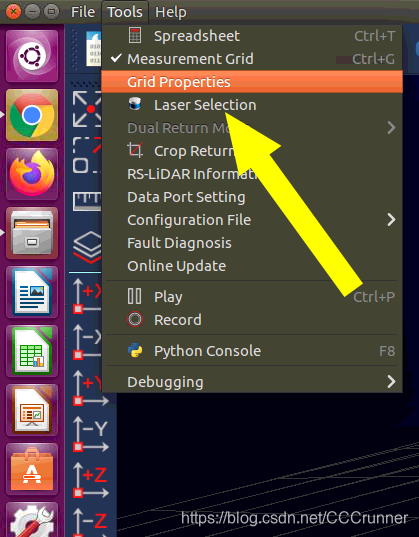
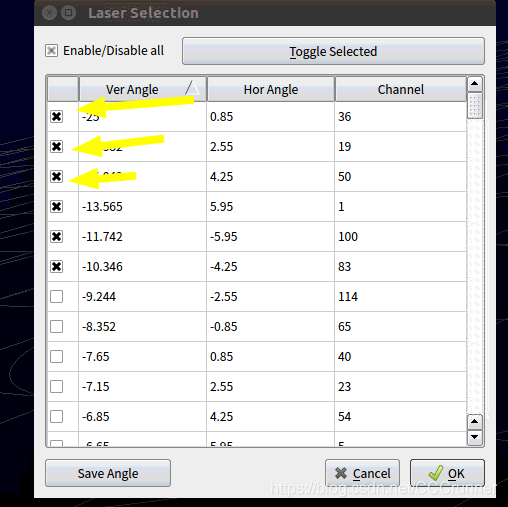
选择Laser Selection 选项,x表示选中
- 启动innoviz雷达
roslaunch innoviz_ros innoviz_ros.launch
查看点云地图
rviz rviz
frame_id: innoviz


















 514
514

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











