



 Gmapping 只适用于 单帧二维激光点数小于1440的点,如果单帧激光点数大于1440,那么就会出现
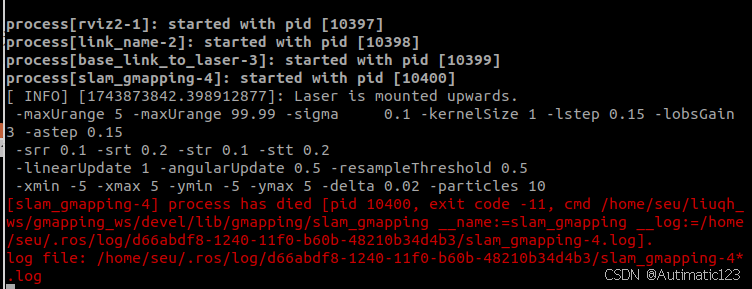
Gmapping 只适用于 单帧二维激光点数小于1440的点,如果单帧激光点数大于1440,那么就会出现[mapping-4] process has died 这样的问题。
使用的rs16点数太多,没法使用gmapping,需要把单帧二维激光点数配置为1440
Gmapping 只适用于 单帧二维激光点数小于1440的点,如果单帧激光点数大于1440,那么就会出现[mapping-4] process has died 这样的问题。
使用的rs16点数太多,没法使用gmapping,需要把单帧二维激光点数配置为1440
 598
598

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























