






在同门指导下,使用EVO工具,查看fast-lio和lio-sam运行轨迹对比和RMSE指标。
首先要修改fast-lio和lio-sam src文件下的代码,保存轨迹信息。
fast-lio下/fast-lio/src/fast-lio/src的laserMapping.cpp,发布里程计后面添加如下代码
// 发布里程计
void publish_odometry(const ros::Publisher &pubOdomAftMapped) {
odomAftMapped.header.frame_id = "camera_init";
odomAftMapped.child_frame_id = "body";
odomAftMapped.header.stamp = ros::Time().fromSec(lidar_end_time); // ros::Time().fromSec(lidar_end_time);
set_posestamp(odomAftMapped.pose);
pubOdomAftMapped.publish(odomAftMapped);
auto P = kf.get_P();
for (int i = 0; i < 6; i++) {
int k = i < 3 ? i + 3 : i - 3;
// 设置协方差 P里面先是旋转后是位置 这个POSE里面先是位置后是旋转 所以对应的协方差要对调一下
odomAftMapped.pose.covariance[i * 6 + 0] = P(k, 3);
odomAftMapped.pose.covariance[i * 6 + 1] = P(k, 4);
odomAftMapped.pose.covariance[i * 6 + 2] = P(k, 5);
odomAftMapped.pose.covariance[i * 6 + 3] = P(k, 0);
odomAftMapped.pose.covariance[i * 6 + 4] = P(k, 1);
odomAftMapped.pose.covariance[i * 6 + 5] = P(k, 2);
}
std::ofstream pose1("/home/liuqh/slam_data/fastlio.txt", std::ios::app);
// pose1.setf(std::ios::scientific, std::ios::floatfield);
pose1.precision(9);
static double timeStart =odomAftMapped.header.stamp.toSec();
auto T1 = ros::Time().fromSec(timeStart);
ros::Time now_time = odomAftMapped.header.stamp;
pose1 << now_time<< " "
<< odomAftMapped.pose.pose.position.x << " "
<< odomAftMapped.pose.pose.position.y << " "
<< odomAftMapped.pose.pose.position.z << " "
<< odomAftMapped.pose.pose.orientation.x << " "
<< odomAftMapped.pose.pose.orientation.y << " "
<< odomAftMapped.pose.pose.orientation.z << " "
<< odomAftMapped.pose.pose.orientation.w << std::endl;
pose1.close();
static tf::TransformBroadcaster br;
tf::Transform transform;
tf::Quaternion q;
transform.setOrigin(tf::Vector3(odomAftMapped.pose.pose.position.x, odomAftMapped.pose.pose.position.y, odomAftMapped.pose.pose.position.z));
q.setW(odomAftMapped.pose.pose.orientation.w);
q.setX(odomAftMapped.pose.pose.orientation.x);
q.setY(odomAftMapped.pose.pose.orientation.y);
q.setZ(odomAftMapped.pose.pose.orientation.z);
transform.setRotation(q);
br.sendTransform(tf::StampedTransform(transform, odomAftMapped.header.stamp, "camera_init", "body")); // 发布tf变换
}
下面代码是后面添加的,保存轨迹信息。
std::ofstream pose1("/home/liuqh/slam_data/fastlio.txt", std::ios::app);
// pose1.setf(std::ios::scientific, std::ios::floatfield);
pose1.precision(9);
static double timeStart =odomAftMapped.header.stamp.toSec();
auto T1 = ros::Time().fromSec(timeStart);
ros::Time now_time = odomAftMapped.header.stamp;
pose1 << now_time<< " "
<< odomAftMapped.pose.pose.position.x << " "
<< odomAftMapped.pose.pose.position.y << " "
<< odomAftMapped.pose.pose.position.z << " "
<< odomAftMapped.pose.pose.orientation.x << " "
<< odomAftMapped.pose.pose.orientation.y << " "
<< odomAftMapped.pose.pose.orientation.z << " "
<< odomAftMapped.pose.pose.orientation.w << std::endl;
pose1.close();
接下来是lio-sam,在/lio-sam_ws/src/LIO-SAM/src的mapOptmization.cpp中添加下面代码
laserOdomIncremental.header.stamp = timeLaserInfoStamp;
laserOdomIncremental.header.frame_id = odometryFrame;
laserOdomIncremental.child_frame_id = "odom_mapping";
laserOdomIncremental.pose.pose.position.x = x;
laserOdomIncremental.pose.pose.position.y = y;
laserOdomIncremental.pose.pose.position.z = z;
laserOdomIncremental.pose.pose.orientation = tf::createQuaternionMsgFromRollPitchYaw(roll, pitch, yaw);
if (isDegenerate)
laserOdomIncremental.pose.covariance[0] = 1;
else
laserOdomIncremental.pose.covariance[0] = 0;
}
pubLaserOdometryIncremental.publish(laserOdomIncremental);
// 保存轨迹,path_save是文件目录,txt文件提前建好,/home/xxx/xxx.txt,
std::ofstream pose1("/home/liuqh/slam_data/liosam.txt", std::ios::app);
// pose1.setf(std::ios::scientific, std::ios::floatfield);
pose1.precision(9);
// if(flag_tum=1){
static double timeStart = laserOdomIncremental.header.stamp.toSec();
// flag_tum=0;
// }
auto T1 = ros::Time().fromSec(timeStart);
// tf::Quaternion quat;
// tf::createQuaternionMsgFromRollPitchYaw(double r, double p, double y);//返回四元数
pose1 << laserOdomIncremental.header.stamp<< " "
<< laserOdomIncremental.pose.pose.position.x << " "
<< laserOdomIncremental.pose.pose.position.y << " "
<< laserOdomIncremental.pose.pose.position.z << " "
<< laserOdomIncremental.pose.pose.orientation.x << " "
<< laserOdomIncremental.pose.pose.orientation.y << " "
<< laserOdomIncremental.pose.pose.orientation.z << " "
<< laserOdomIncremental.pose.pose.orientation.w << std::endl;
pose1.close();
}
其中这些代码是新加入的,保存轨迹信息。
pubLaserOdometryIncremental.publish(laserOdomIncremental);
// 保存轨迹,path_save是文件目录,txt文件提前建好,/home/xxx/xxx.txt,
std::ofstream pose1("/home/liuqh/slam_data/liosam.txt", std::ios::app);
// pose1.setf(std::ios::scientific, std::ios::floatfield);
pose1.precision(9);
// if(flag_tum=1){
static double timeStart = laserOdomIncremental.header.stamp.toSec();
// flag_tum=0;
// }
auto T1 = ros::Time().fromSec(timeStart);
// tf::Quaternion quat;
// tf::createQuaternionMsgFromRollPitchYaw(double r, double p, double y);//返回四元数
pose1 << laserOdomIncremental.header.stamp<< " "
<< laserOdomIncremental.pose.pose.position.x << " "
<< laserOdomIncremental.pose.pose.position.y << " "
<< laserOdomIncremental.pose.pose.position.z << " "
<< laserOdomIncremental.pose.pose.orientation.x << " "
<< laserOdomIncremental.pose.pose.orientation.y << " "
<< laserOdomIncremental.pose.pose.orientation.z << " "
<< laserOdomIncremental.pose.pose.orientation.w << std::endl;
pose1.close();
}
重新将fast-lio和lio-sam编译运行,会在指定位置生成如下轨迹信息的txt文件
接着去数据集官网下载轨迹真值,即上图中的street_05.txt,在当前文件夹目录下打开终端
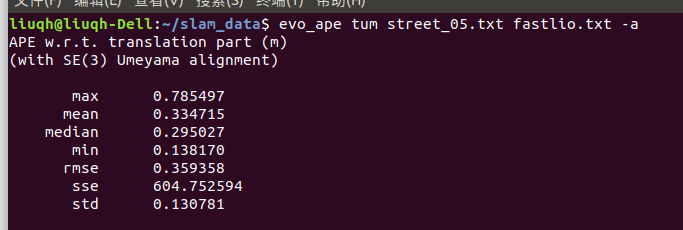
~/slam_data$ evo_ape tum street_03.txt fastlio.txt -a
可以输出fast-lio和轨迹真值的RMSE
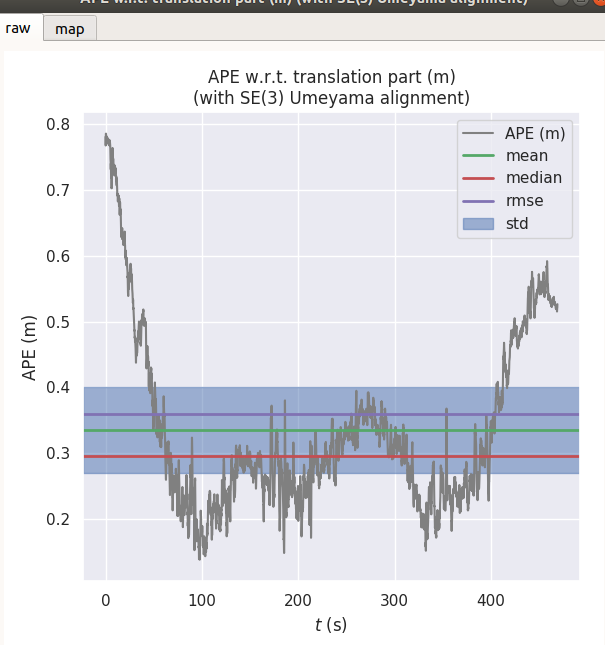
加入-p指令后可以可视化对比,在论文中一般就放这些图片。
~/slam_data$ evo_traj tum --ref street_05.txt fastlio.txt -a -p
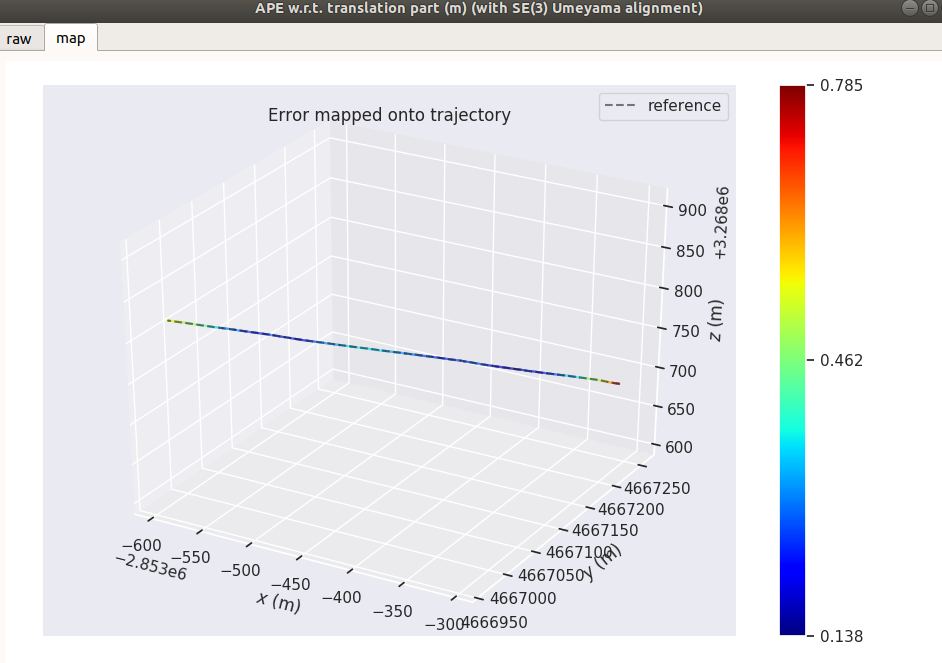
输入下面命令,可以可视化slam轨迹和真值轨迹的贴合程度。
~/slam_data$ evo_traj tum --ref street_05.txt fastlio.txt -a -p
使用下面指令,可以可视化多条轨迹
~/slam_data$ evo_traj tum --ref street_03.txt liosam.txt fastlio.txt -a -p

















 89
89

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









