




《FPGA基础知识》系列导航
本专栏专为FPGA新手打造的Xilinx平台入门指南。旨在手把手带你走通从代码、仿真、约束到生成比特流并烧录的全过程。
本篇是该系列的第四篇内容
上一篇:FPGA基础知识(三):彻底理解阻塞赋值与非阻塞赋值
下一篇:FPGA基础知识(五):深入理解计数器——数字逻辑的时序基石
一 引言
在数字电路设计中,时序逻辑和组合逻辑是构建所有复杂系统的基础。如同阴阳两面,它们各司其职又相互配合,共同构成了现代电子设备的"思维"与"记忆"。
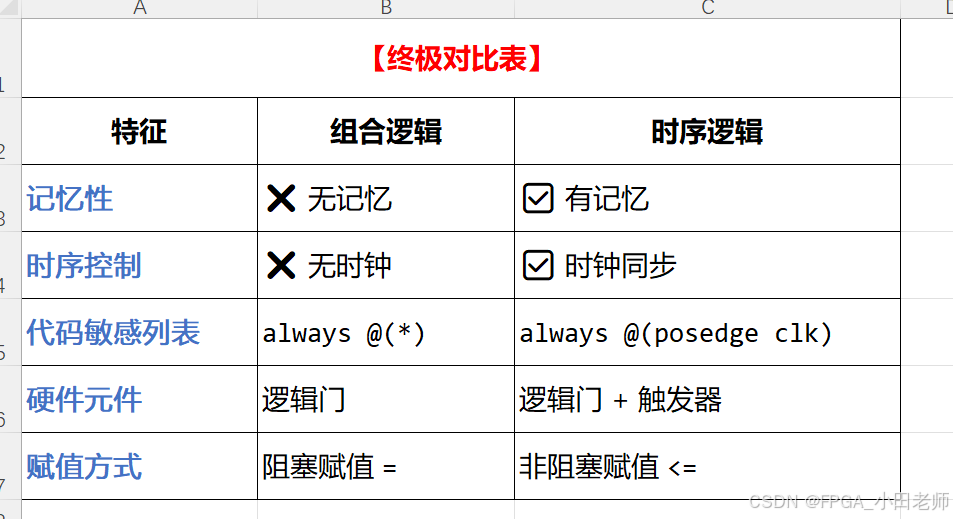
二 本质区别:记忆能力的有无
组合逻辑像是条件反射——它对过去"毫无记忆":
-
输出仅取决于当前输入
-
无时钟信号控制
-
信号变化立即传播
时序逻辑则如同有经验的决策者:
-
输出取决于当前输入和过去状态
-
受时钟信号严格同步
-
状态变化发生在特定时刻
三 硬件实现的根本差异
组合逻辑由基本逻辑门直接构成:
// 组合逻辑的硬件本质就是逻辑门的连接
assign out = (a & b) | c;时序逻辑则必须包含存储元件:
// 时序逻辑的核心是触发器
always @(posedge clk) begin
q <= d; // 这对应一个D触发器
end四 实际工程中的代码体现
组合逻辑的编码风格:
// 方式一:assign语句
assign sum = a + b;
assign equal = (a == b);
// 方式二:always块
always @(*) begin
case (sel)
2'b00: out = a;
2'b01: out = b;
2'b10: out = c;
2'b11: out = d;
default: out = 1'bx;
end
end关键要点:组合逻辑必须保证所有输入信号都在敏感列表中,并且所有可能的输入组合都有明确的输出。
时序逻辑的编码规范:
// 标准的时序逻辑模板
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
// 复位初始化
count <= 8'h00;
state <= IDLE;
end else begin
// 正常工作时序
count <= count + 1'b1;
state <= next_state;
end
end五 工程实践中的关键考量
时序约束的重要性
时序逻辑的性能直接由时钟频率决定,必须满足:
-
建立时间要求:数据在时钟沿前必须稳定
-
保持时间要求:数据在时钟沿后必须保持稳定
组合逻辑的潜在问题
-
毛刺现象:由于门延迟导致瞬时错误输出
-
传播延迟:限制系统最高运行频率
-
静态冒险:输入变化时可能产生干扰脉冲
六 典型应用场景
组合逻辑的适用场景:
-
算术运算单元
-
数据多路选择器
-
编码器/解码器
-
简单逻辑判断
时序逻辑的适用场景:
-
状态机实现
-
数据流水线
-
寄存器文件
-
计数器/定时器
七 混合设计:现实世界的解决方案
实际数字系统往往是时序逻辑与组合逻辑的有机结合:
module simple_cpu #(
parameter DATA_WIDTH = 8
)(
input wire clk,
input wire rst_n,
input wire [DATA_WIDTH-1:0] instruction,
output reg [DATA_WIDTH-1:0] result
);
// 时序部分:指令寄存器
reg [DATA_WIDTH-1:0] instr_reg;
always @(posedge clk or negedge rst_n) begin
if (!rst_n)
instr_reg <= {DATA_WIDTH{1'b0}};
else
instr_reg <= instruction;
end
// 组合部分:指令译码
wire [3:0] opcode;
wire [3:0] operand;
assign opcode = instr_reg[7:4];
assign operand = instr_reg[3:0];
// 时序部分:执行阶段
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
result <= {DATA_WIDTH{1'b0}};
end else begin
case (opcode)
4'b0001: result <= operand + result;
4'b0010: result <= operand - result;
// ... 其他操作
default: result <= result;
endcase
end
end
endmodule八 设计验证与调试技巧
组合逻辑的验证重点:
-
验证所有输入组合
-
检查输出是否出现毛刺
-
确认传播延迟满足要求
时序逻辑的验证重点:
-
验证复位序列
-
检查时序约束是否满足
-
确认状态转换正确性
九 性能优化策略
组合逻辑优化:
-
逻辑门数最小化
-
关键路径优化
-
流水线技术应用
时序逻辑优化:
-
时钟域交叉处理
-
时序收敛保证
-
功耗优化考虑
总结与展望
时序逻辑和组合逻辑的理解深度直接决定了数字电路设计的水平。掌握它们的特性和适用场景,能够帮助工程师:
-
设计出更稳定可靠的电路
-
优化系统性能和功耗
-
快速定位和解决设计问题
-
构建复杂的数字系统
随着FPGA和ASIC技术的发展,对这两种基本逻辑结构的深入理解变得愈发重要。它们不仅是入门的基础,更是进阶的阶梯。
实践建议:从简单的计数器、状态机开始,逐步深入到复杂的处理器设计,在实践中不断深化对时序逻辑和组合逻辑的理解。


















 184
184

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











