







Matlab多车编队自适应协同控制
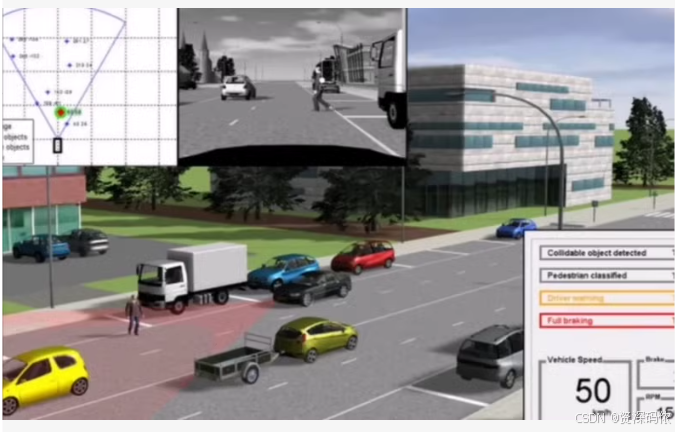
通过考虑前车的加速度和距离,实现ACC自适应协同控制的多车编队(5辆车),达到自适应巡航控制,并在carsim/Simulink仿真平台上进行模拟。
该算法结构分为两层:上层是滑膜控制器,用于生成期望的加速度;下层则通过调节节气门开度和刹车制动压力来控制车速。
在仿真中,输出以下数据:
- 5辆车的前车与后车之间的跟踪误差;
- 5辆车的车速变化;
- 4辆车的节气门和制动压力的变化。
文章目录
实现多车编队的自适应协同控制(ACC)是一个复杂的任务,需要结合滑模控制、车辆动力学建模以及仿真平台(如Simulink和Carsim)。以下是一个简化的实现思路和代码框架。
1. 系统设计
上层:滑模控制器
- 目标是生成每辆车的期望加速度。
- 滑模控制器的核心是设计一个滑模面,使得系统状态能够快速收敛到滑模面上,并保持稳定。
下层:节气门与制动控制
- 根据期望加速度调节节气门开度和制动压力。
- 使用PI控制器或其他方法来实现精确的速度跟踪。
—
2. 仿真平台
- Simulink:用于实现控制系统逻辑。
- Carsim:提供高精度的车辆动力学模型。
3. MATLAB代码框架
% 清空环境
clear; clc;
% 参数设置
N = 5; % 车辆数量
dt = 0.01; % 仿真时间步长 (s)
T = 20; % 总仿真时间 (s)
time = 0:dt:T; % 时间向量
% 初始条件
x = zeros(N, length(time)); % 每辆车的位置
v = zeros(N, length(time)); % 每辆车的速度
a = zeros(N, length(time)); % 每辆车的加速度
u_throttle = zeros(N, length(time)); % 节气门开度
u_brake = zeros(N, length(time)); % 制动压力
% 跟踪误差
tracking_error = zeros(N-1, length(time));
% 滑模控制器参数
lambda = 1.0; % 滑模面参数
k = 0.5; % 控制增益
% 下层控制器参数
Kp = 1.0; % PI控制器比例增益
Ki = 0.1; % PI控制器积分增益
% 初始位置和速度
x(:, 1) = [0, 10, 20, 30, 40]; % 初始位置 (m)
v(:, 1) = [20, 20, 20, 20, 20]; % 初始速度 (m/s)
% 主循环
for t = 1:length(time)-1
for i = 1:N
if i == 1
% 第一辆车作为领头车,设定恒定速度
v_ref = 20; % 领头车目标速度 (m/s)
a(i, t+1) = 0; % 领头车加速度为0
else
% 计算跟踪误差
tracking_error(i-1, t) = x(i-1, t) - x(i, t) - 10; % 假设安全距离为10m
% 上层滑模控制器
s = lambda * tracking_error(i-1, t) + (v(i-1, t) - v(i, t));
a_desired = a(i-1, t) - k * sign(s);
% 下层PI控制器
error = a_desired - a(i, t);
integral_error = integral_error + error * dt;
u_throttle(i, t+1) = Kp * error + Ki * integral_error;
% 限制节气门开度在 [0, 1]
u_throttle(i, t+1) = max(0, min(1, u_throttle(i, t+1)));
% 制动压力计算(简化假设)
if a_desired < 0
u_brake(i, t+1) = -a_desired;
else
u_brake(i, t+1) = 0;
end
% 更新加速度
a(i, t+1) = u_throttle(i, t+1) - u_brake(i, t+1);
end
% 更新速度和位置
v(i, t+1) = v(i, t) + a(i, t+1) * dt;
x(i, t+1) = x(i, t) + v(i, t+1) * dt;
end
end
% 绘图
figure;
subplot(3, 1, 1);
plot(time, tracking_error');
title('跟踪误差');
xlabel('时间 (s)');
ylabel('误差 (m)');
legend(arrayfun(@(i) sprintf('车%d', i), 1:N-1, 'UniformOutput', false));
subplot(3, 1, 2);
plot(time, v');
title('车速变化');
xlabel('时间 (s)');
ylabel('速度 (m/s)');
legend(arrayfun(@(i) sprintf('车%d', i), 1:N, 'UniformOutput', false));
subplot(3, 1, 3);
plot(time, u_throttle(2:end, :)', time, u_brake(2:end, :)');
title('节气门开度与制动压力');
xlabel('时间 (s)');
ylabel('控制输入');
legend('节气门', '制动');
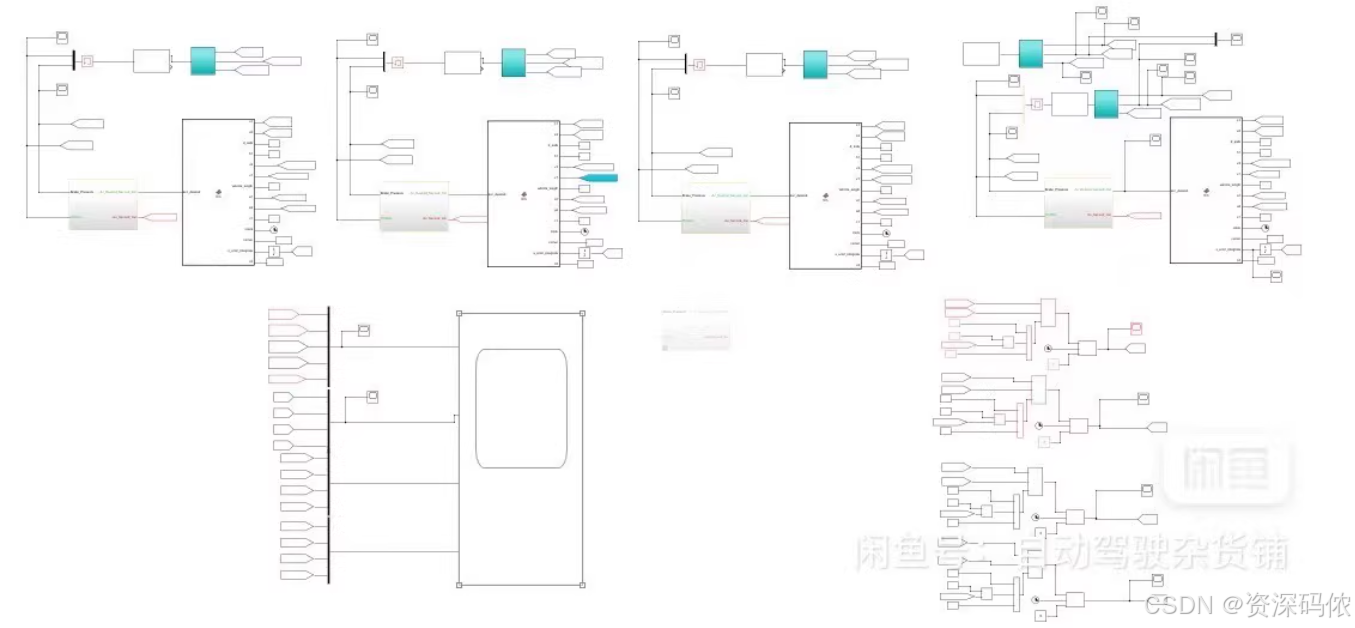
4. Simulink/Carsim集成
-
Simulink模型:
- 创建一个包含5个车辆模块的仿真模型。
- 每个车辆模块包含滑模控制器和PI控制器。
- 将车辆动力学模型通过S-Function或FMU接口连接到Carsim。
-
Carsim配置:
- 在Carsim中定义车辆参数(质量、轮胎特性等)。
- 设置初始位置和速度。
- 将Carsim输出(如速度、位置)反馈到Simulink。
-
联合仿真:
- 运行Simulink仿真,观察Carsim中的车辆行为。
- 输出跟踪误差、车速变化、节气门开度和制动压力。
5. 注意事项
- 滑模控制器调参:
lambda和k的选择会影响系统的响应速度和稳定性。 - 节气门与制动分配:实际车辆中,节气门和制动不能同时作用,需设计合理的切换逻辑。
- 仿真精度:确保Carsim中的车辆模型与实际控制逻辑一致。

















 608
608

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









