



基于滑膜控制的21-多车编队自适应协同控制
一、引言
随着汽车智能化和自动化的快速发展,多车编队自适应协同控制技术已成为智能交通的重要组成部分。本文将探讨如何通过考虑前车的加速度和距离,实现基于滑膜控制器的自适应巡航控制(ACC)多车编队,并在Carsim Simulink仿真平台上进行模拟。
二、结构
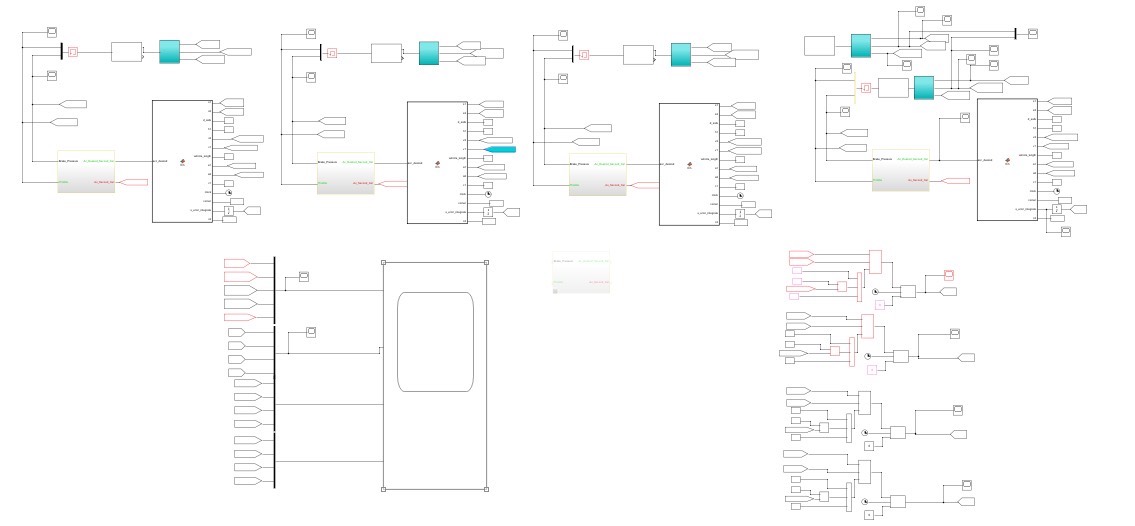
该算法结构分为两层。上层是滑膜控制器,其作用是生成期望的加速度。通过考虑当前车与前车的距离以及前车的加速度,滑膜控制器可以实时调整期望的加速度,使多车编队在道路上的行驶更为流畅和稳定。
下层则是根据上层的期望加速度来控制车辆的行驶。这一层主要依赖于车辆的动力学模型,通过调节节气门开度和刹车制动压力来控制车速,以达到期望的加速度。
三、仿真实验
在Carsim Simulink仿真平台上,我们模拟了五辆车的多车编队行驶。在仿真中,我们输出了以下数据:
-
5辆车的前车与后车之间的跟踪误差:这一数据反映了多车编队的协同控制效果,以及每辆车对前车行为的响应速度和准确性。
-
5辆车的车速变化:这一数据可以反映出车辆在行驶过程中的速度调整情况,以及滑膜控制器对期望加速度的跟踪效果。
-
4辆车的节气门和制动压力的变化:这一数据可以反映出下层控制器如何根据上层的期望加速度来调节车辆的动力学,从而达到期望的加速度。
四、结果分析
实验结果表明,基于滑膜控制的21-多车编队自适应协同控制方法具有良好的性能和效果。特别是在跟踪误差、车速变化以及节气门和制动压力的变化等方面,滑膜控制器的效果非常好,不亚于模型预测控制(MPC)。此外,由于滑膜控制器的设计相对简单且易于实现,因此该方法在实车试验中也十分方便。
五、文件资料
所提供的文件包括ACC巡航建模资料和滑膜控制的详细资料。其中,ACC巡航建模资料详细介绍了如何建立车辆的巡航控制模型;而滑膜控制的详细资料则包括滑膜控制的原理、设计方法以及在多车编队自适应协同控制中的应用等。此外,还包括了滑膜控制的总结,对于学习滑膜控制有一定帮助。
六、结论
本文介绍了基于滑膜控制的21-多车编队自适应协同控制方法。该方法通过考虑前车的加速度和距离,实现了多车编队的协同控制,并在Carsim Simulink仿真平台上进行了模拟。实验结果表明,该方法具有良好的性能和效果,且在实车试验中也十分方便。因此,该方法具有广泛的应用前景和重要的实际意义。
21-多车编队自适应协同控制
通过考虑前车的加速度和距离,实现ACC自适应协同控制的多车编队(5辆车),达到自适应巡航控制,并在carsim/Simulink仿真平台上进行模拟。
该算法结构分为两层:上层是滑膜控制器,用于生成期望的加速度;下层则通过调节节气门开度和刹车制动压力来控制车速。
在仿真中,输出以下数据:
- 5辆车的前车与后车之间的跟踪误差;
- 5辆车的车速变化;
- 4辆车的节气门和制动压力的变化。
基于滑膜控制的效果非常好,不亚于模型预测控制(MPC)
此外,该方法在实车试验中也十分方便。
所提供的文件包括ACC巡航建模资料和滑膜控制的详细资料,其中还包括滑膜控制的总结,对于学习滑膜控制有一定帮助。



















 2236
2236

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









