






33.ROS 的标准消息包 std_msgs_哔哩哔哩_bilibili
一、ros消息包类型
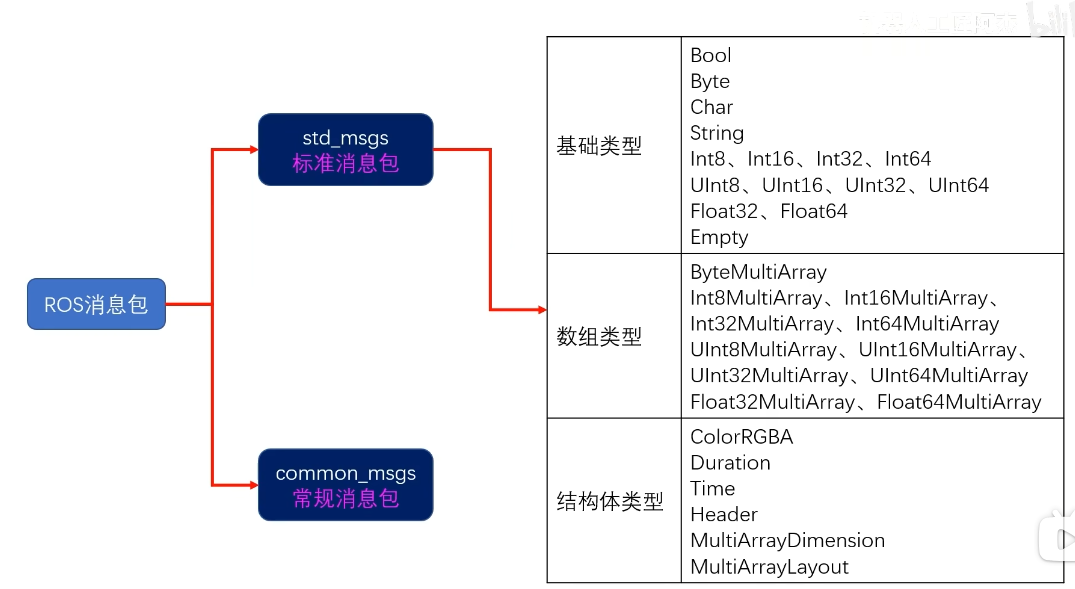
 ros自带的消息包类型主要分为标准消息包和几何消息包两类,
ros自带的消息包类型主要分为标准消息包和几何消息包两类,
其中标准消息包里:
- empty空类型通常用来传递某个信号,如控制机器人开始执行某些任务等,来处理无需传递具体数据的通信需求。
- 数组类型是可变数组,通常用来接收某些长度不确定的传感器数值等,单独使用通常是在快速原型开发时。
- 结构体类型中,colorRGBA包含了红绿蓝透明度四个分量,用来完整描述一个像素,Duration(相对时间,可正可负)和Time(绝对时间,无符号整数)都是表示时间的消息包,Header(消息头)通常包含时间戳和坐标系名称,雷达消息类型那一章遇到过。MultiArray_Dimension和MultiArray_layout都是用来表示数组结构的结构体,在数组消息包里会用到
1. MultiArrayDimension
定义MultiArrayDimension是一个结构体,用于描述多维数组的单个维度的属性。它包含以下字段:
label:维度的名称(如"rows"、"columns"等),字符串类型。
size:该维度的大小(元素个数)。
stride:该维度的步长(即从一个元素到下一个元素在内存中的跳跃距离)。例如,在二维数组中,stride表示行与行之间的间隔。用途
每个维度的MultiArrayDimension对象描述了该维度的大小和步长,从而定义了多维数组的形状和内存布局。
2. MultiArrayLayout
定义MultiArrayLayout是一个结构体,包含以下字段:
dim:一个MultiArrayDimension的数组,表示所有维度的描述。
data_offset:数据在底层一维数组中的起始偏移量(通常设为0)。用途
MultiArrayLayout将多个MultiArrayDimension组合起来,形成多维数组的完整布局描述。它告诉ROS如何将底层的一维数据数组解析为多维结构。
- 通常很少直接传递std_msgs消息包里的类型,而是自己组合新类型使用,来满足不同的需求,同时防止出现消息类型传错难以排查的情况
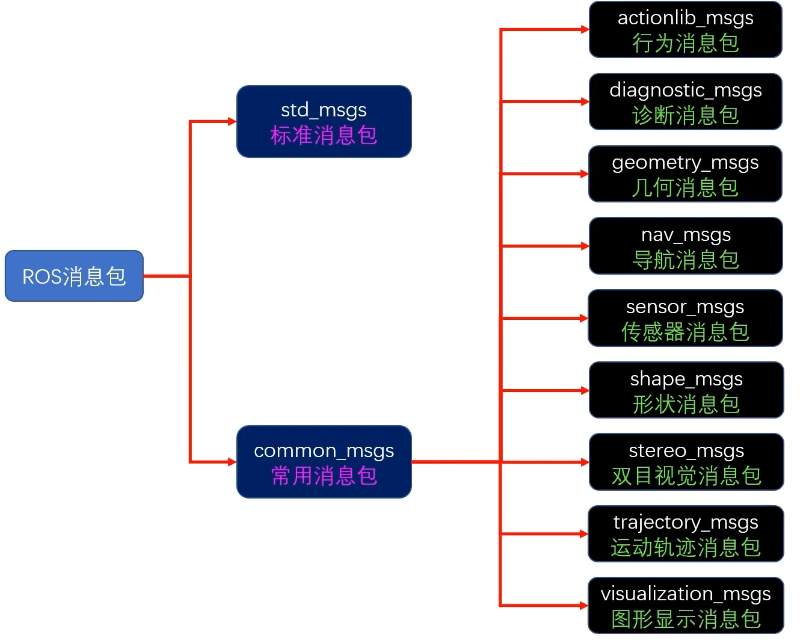
在常用消息包里:
- actionlib_msgs用于支持ROS的动作(Action)通信机制
-
diagnostic_msgs是机器人的自我诊断消息包,一般在机器人自检的时候用到
-
geometry_msgs几何消息包,用来表示运动、位置、姿态等信息,之前的实验中使用过
 几何消息包中带stamped的都是多了一个消息头(Header),包含了时间戳和坐标系信息。
几何消息包中带stamped的都是多了一个消息头(Header),包含了时间戳和坐标系信息。 -
nav_msgs导航消息包
-
sensor_msgs传感器消息包,里面是各种传感器的消息类型,之前用过激光雷达和imu的相关消息类型
-

二、在ROS中生成自定义消息类型
1、创建消息包:
进入工作空间并创建软件包,相比以前要多使用两个创建消息包的依赖项message_generation和message_runtime
cd ~/catkin_ws/src
catkin_create_pkg my_msgs rospy roscpp std_msgs message_generation message_runtime从这里可以看出,所谓的消息包也是一个软件包。
2、创建msg目录和消息文件:
在功能包目录下创建msg目录,并添加自定义消息文件(.msg后缀):
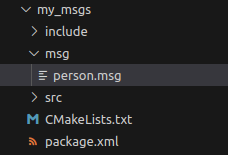
在文件里定义新的消息结构 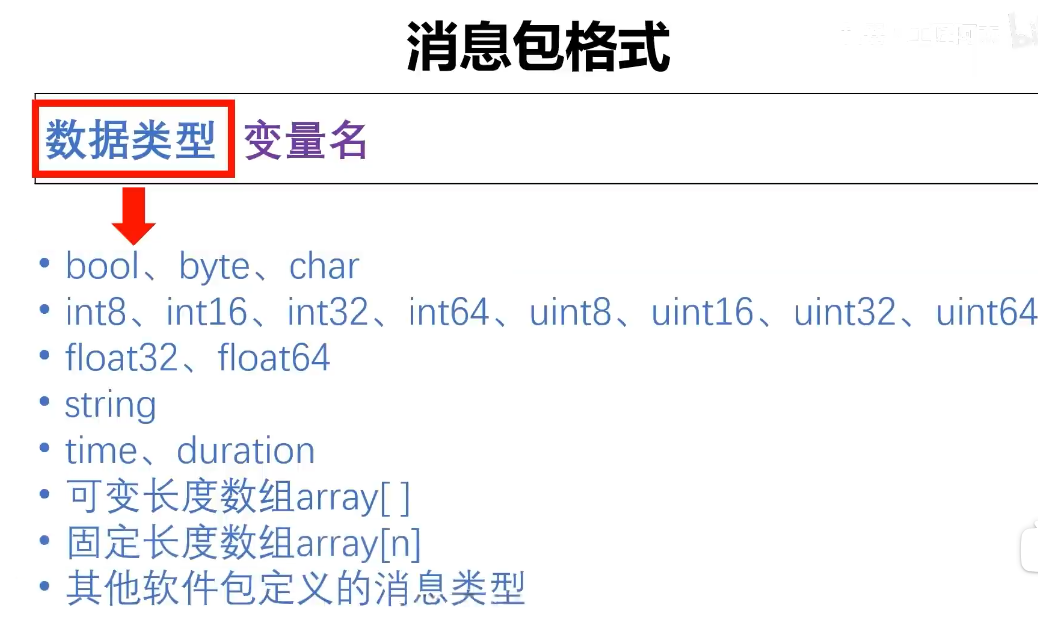
如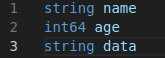
3、在CMakeLists.txt中为消息包设置编译规则
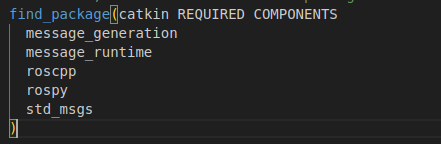
①打开CMakeLists.txt,确认find_package中已包含message_generation和message_runtime
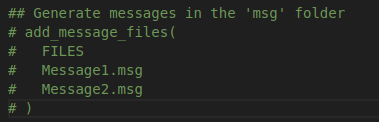
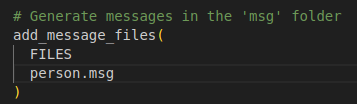
②找到cmakelists提供的add_message_file模板并修改
③找到cmakelists提供的generate_messages模板并修改
generate_messages是表明新的消息类型所依赖的其他消息包列表

④在cmakelists提供的catkin_package项中“点亮”CATKIN_DEPENDS这一句(取消注释)

这是为了让依赖新消息包(my_msgs)的其他软件包,在运行时使用这个新消息类型
4、修改package.xml
5、编译消息包
进入工作空间并通过catkin_make命令编译
PC:~$ cd catkin_ws
PC:~/catkin_ws$ catkin_make
通过以下代码来查看自定义消息类型是否被收录到ros消息列表里
PC:~/catkin_ws$ rosmsg show my_msgs/person三、自定义消息包在发布者和订阅者节点的应用(python)
1、修改此前的发布者节点chao_node
①引入新的自定义消息类型
from my_msgs.msg import person #从my_msgs自定义消息包中导入person消息类型②修改发布者对象pub、消息包msg的消息类型,并填充消息包内容
pub = rospy.Publisher("chao_node_test_topicname", person, queue_size=10)
msg = person()
msg.name = "自定义消息类型~name~"
msg.age = 28 #自定义消息类型的int64 age属性
msg.data = "自定义消息类型data"#自定义消息类型的string data属性③在编译规则中添加消息包的依赖项
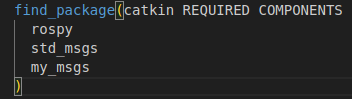
打开cmakelists.txt,在find_package内加入my_msgs,告诉程序运行时要先编译自定义消息包
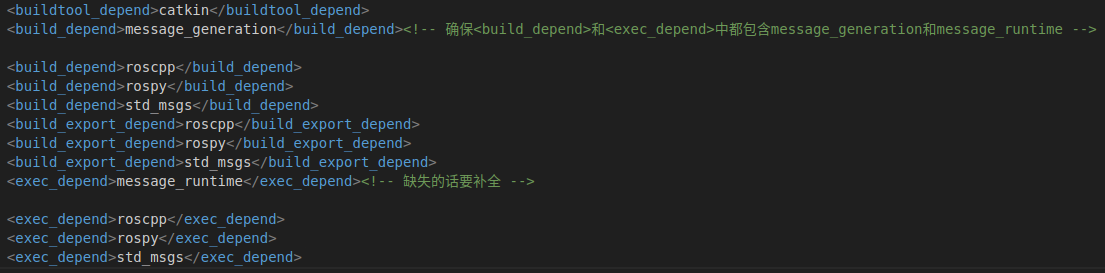
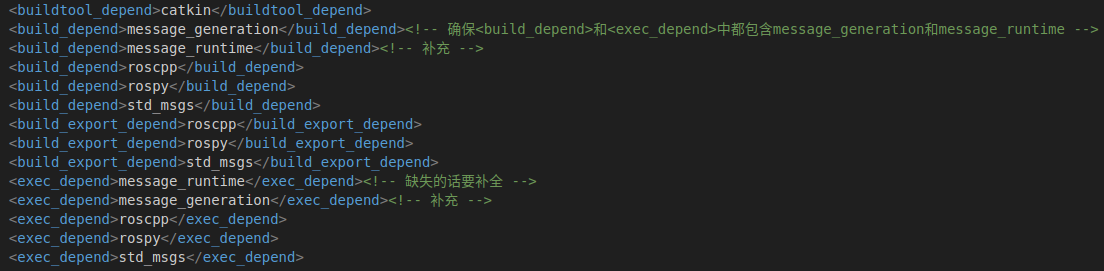
打开package.xml,在<build_depend>(构建时依赖)和<exec_depend>(运行时依赖)项中加入my_msgs
<buildtool_depend>catkin</buildtool_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_depend>my_msgs</build_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<exec_depend>my_msgs</exec_depend>④打开终端,进入catkin_ws工作空间,在进行一次编译catkin_make
2、修改此前的订阅者节点
①引入新的自定义消息类型
from my_msgs.msg import person #从my_msgs自定义消息包中导入person消息类型②修改订阅者对象sub、回调函数chao_callback的消息类型,修改回调函数以显示自定义消息包的内容
sub_1 = rospy.Subscriber("chao_node_test_topicname", person, chao_callback,queue_size=10)
ef chao_callback(msg):#第三步,定义一个回调函数chao_callback,用于处理接收到的消息
#该函数会在接收到消息时被自动调用,参数msg是接收到的消息对象
#msg.data是消息的内容
#可以在这里对消息进行处理,例如,将消息内容存储到变量中,或者进行一些计算
#这里我们只是简单地打印消息内容
rospy.logwarn("自定义消息类型name: %s", msg.name)#打印接收到的消息内容
rospy.logwarn("自定义消息类型age: %s", str(msg.age))#打印接收到的消息内容
rospy.loginfo("自定义消息类型data: %s", msg.data)#打印接收到的消息内容
③修改编译规则,同上
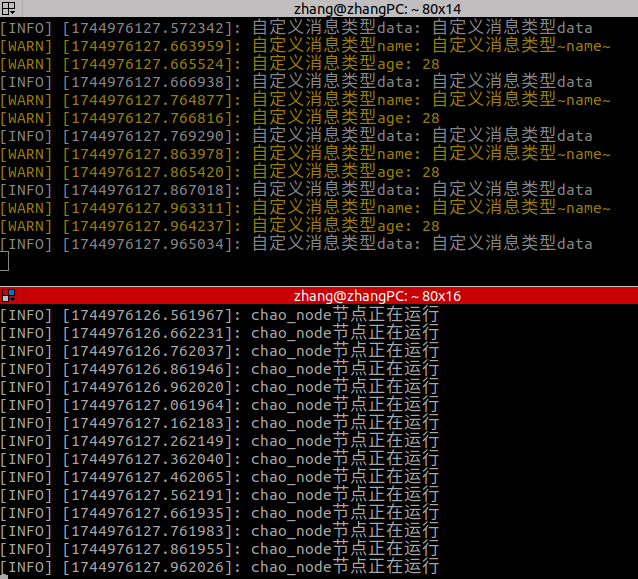
3、同时运行发布者和订阅者节点
roscore启动ros系统
rosrun运行ma_node.py和chao_node.py
效果如下

















 3570
3570

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









