






28. ROS 中的 IMU 惯性测量单元消息包_哔哩哔哩_bilibili
一、IMU的消息包格式
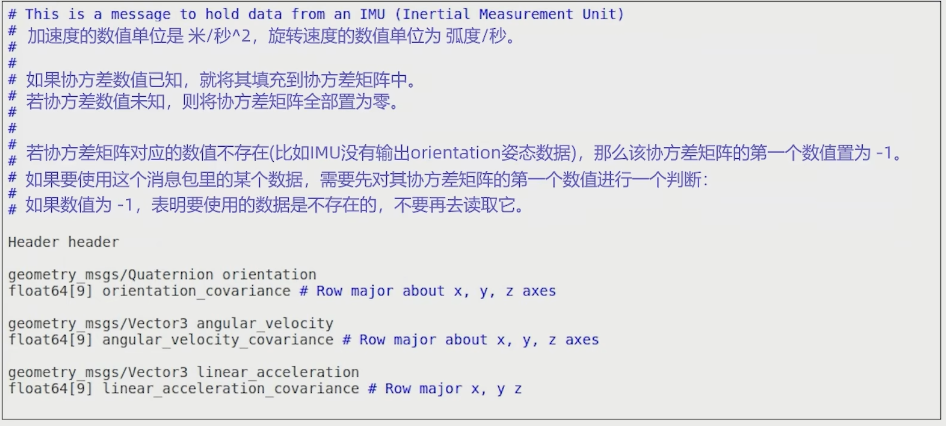
header消息头,包含了时间戳和坐标系编号等信息
orientation空间姿态信息,采用四元数(Quaternion)方式表示
angular_velocity角速度信息,采用Vector3表示(和速度一样)
linear_acceleration矢量加速度信息,采用Vector3表示,表示在x/y/z轴方向上的加速度
后三个消息后面都跟了一个协方差矩阵
二、IMU设备发布的话题
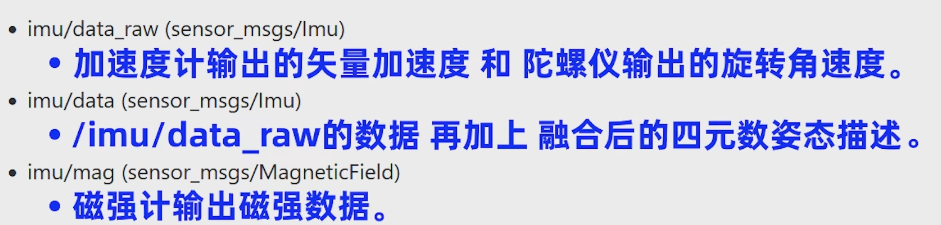
其中磁强计数据只有九轴IMU包含。一般应用中订阅第二个话题。
使用rostopic echo /imu/data --noarr命令查看第二个话题中消息包格式如下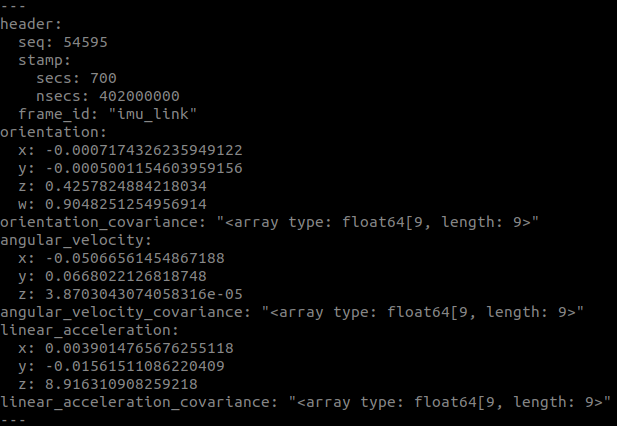
三、订阅者节点获取IMU数据的python实现
1.进入工作空间catkin_ws/src/,使用catkin_create_pkg命令创建软件包,创建后回退到catkin_ws目录,使用catkin_make命令进行编译,将新创建的软件包加入ros的包列表里。
~/catkin_ws/src$ catkin_create_pkg imu_pkg roscpp rospy sensor_msgs
~/catkin_ws/src$ cd..
~/catkin_ws$ catkin_make2.在vscode中找到imu_pkg文件夹,新建scripts子目录,并在其中新建imu_node.py文件,在此文件中编写代码,编写完成后,在终端中打开scripts子目录,通过chmod +x imu_node.py命令为文件添加可执行权限。
#!/usr/bin/env python3
# coding=utf-8
import rospy
from sensor_msgs.msg import Imu # 引入IMU的消息格式
from tf.transformations import euler_from_quaternion # 引入四元数转欧拉角的函数
import math # 引入数学库,需要用到PI
def imu_callback(msg):
if msg.orientation_covariance[0] < 0: #如果协方差矩阵的第一个元素小于0,说明IMU中没有数据,直接返回
return
quaternion = [
msg.orientation.x,
msg.orientation.y,
msg.orientation.z,
msg.orientation.w
] #将消息包里的四元数重新组合成tf的四元数对象格式
(roll, pitch, yaw) = euler_from_quaternion(quaternion) #将四元数转化为欧拉角
roll = roll*180/math.pi #将弧度转化为角度
pitch = pitch*180/math.pi
yaw = yaw*180/math.pi
rospy.loginfo("滚转: %.0f, 俯仰: %.0f, 偏航: %f", roll, pitch, yaw) #打印欧拉角
if __name__ == "__main__":
rospy.init_node('imu_node') #初始化节点
imu_sub = rospy.Subscriber("/imu/data", Imu, imu_callback, queue_size=10)
rospy.spin()
四、IMU航向锁定的python实现
在前面的程序基础上修改,加入运动控制的部分
1.通过rospy发布速度话题/cmd_vel并创建发布者节点vel_pub(要记得import速度话题的消息格式)
from geometry_msgs.msg import Twist # 引入Twist消息格式
vel_pub = rospy.Publisher("/cmd_vel", Twist, queue_size=10) 2.设定一个目标朝向角,当机器人目前航向角和目标朝向角不同时,控制机器人转向目标朝向角
(记得在回调函数中把vel_pub设定为全局变量,否则每次调用回调函数都会新建一个未关联/cmd_vel话题的新发布者变量,导致发布失败)
target_yaw = 0 # 目标偏航角
def imu_callback(msg):
global vel_pub
{
#回调函数里关于获取imu数据的内容
}
vel_cmd = Twist()
vel_cmd.angular.z = (target_yaw - yaw) * 0.01 #计算偏航角的差值
vel_cmd.linear.x = 0.3
vel_pub.publish(vel_cmd) #发布速度信息
















 2254
2254

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









