




为什么要进行相机参数标定
在拍摄中,相机可能会出现畸变,用软件的方法校正生成的图像,避免拍摄出的图像产生桶形和枕形畸变

不同的镜头的在生产和组装过程中的畸变程度各不相同,通过相机标定可以校正这种镜头畸变,生成矫正后的图像。
相机内参矩阵原理
针孔相机模型

设P=(X,Y,Z)为场景中的一点,在针孔相机模型中,其要经过以下几个变换,最终变为二维图像上的像点p=(μ,ν)
1、将P从世界坐标系通过刚体变换(旋转和平移)变换到相机坐标系,这个变换过程使用的是相机间的相对位姿,也就是相机的外参数。
2、从相机坐标系,通过透视投影变换到相机的成像平面上的像点p=(x,y)
3、将像点p从成像坐标系,通过缩放和平移变换到像素坐标系上点p=(μ,ν)
相机将场景中的三维点变换为图像中的二维点,也就是各个坐标系变换的组合,可将上面的变换过程整理为矩阵相乘的形式

矩阵K称为相机的内参数矩阵
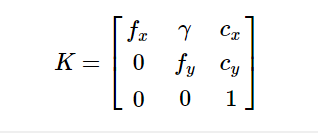
对于大多数标准相机来说,可将扭曲参数γ设为0.
像主点(光心):光线坐标轴和图像平面的交点
相机标定方法——Recap: 相机标定
因为相机拍摄的照片会损失三维的信息。
因此如果要对相机进行标定,我们首先要恢复照片的三维信息
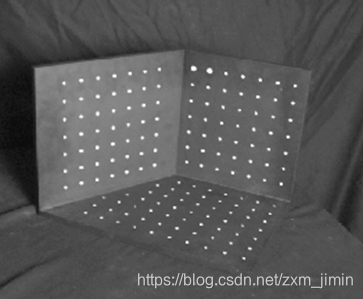
在过去,通常采用制造三个相互垂直的平面
标定工具需要有极高的精度,包括不同平面的角度、特征点的物理距离等。因此制作标定工具十分困难。
张正友标定法
使用棋盘格标定的方法,将照片中的三维信息压缩为
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 659
659

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









