




基于前馈补偿的PID控制算法是一种结合前馈控制与反馈控制的改进型控制方法。它通过在传统PID控制中引入前馈补偿通道,提前对系统的已知扰动或输入信号进行补偿,从而增强控制系统的响应速度与抗扰能力。
前馈补偿的核心思想
在传统PID控制中,系统仅依赖反馈误差调整输出,这种方式虽然简单,但只能对已发生的误差进行修正,存在一定的滞后性。而引入前馈控制后,利用对系统输入或扰动的先验信息,直接生成补偿信号提前作用于系统,从而减少误差的产生。
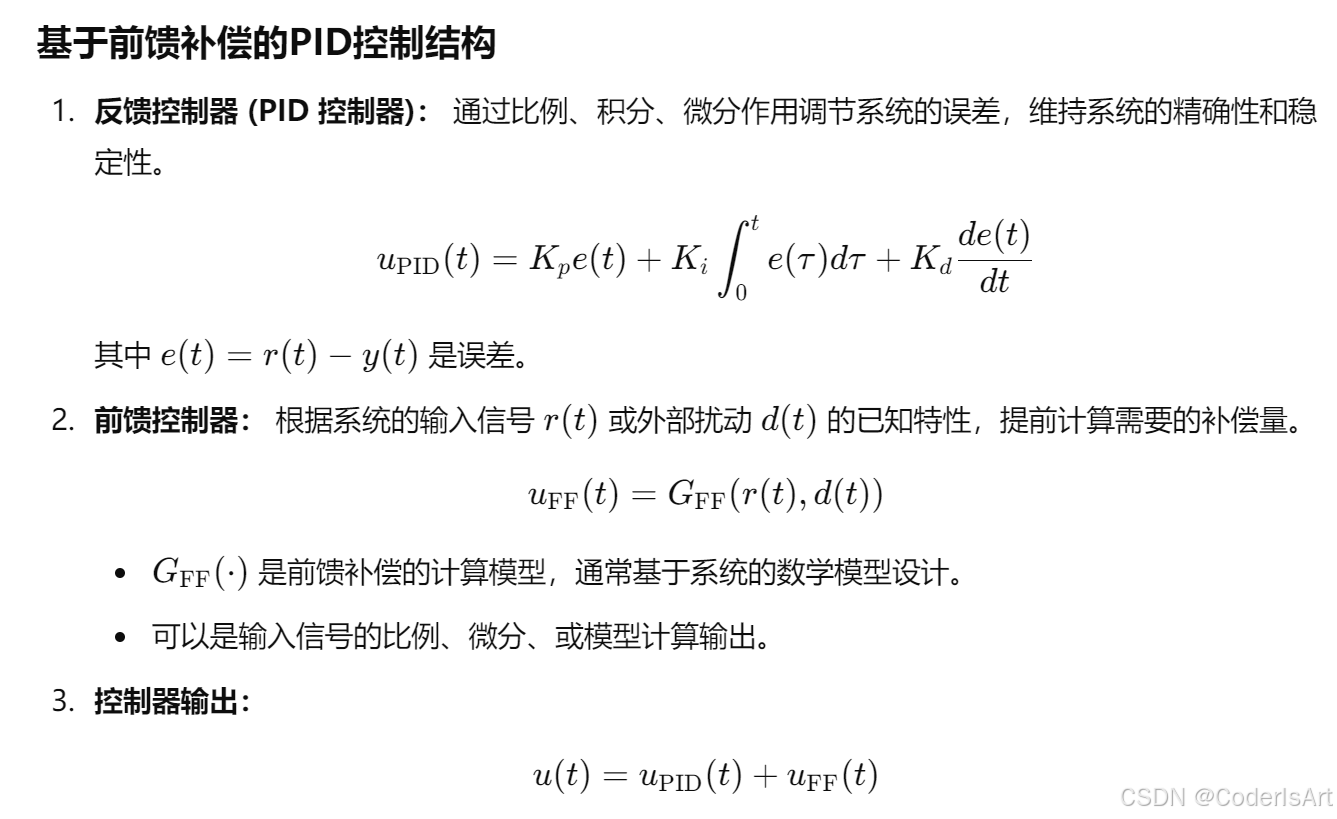
前馈-反馈结合的控制公式为:
算法实现
以下是基于前馈补偿的PID控制伪代码:
class PIDWithFeedforward:
def __init__(self, Kp, Ki, Kd, G_ff, dt):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.G_ff = G_ff # 前馈增益或前馈模型函数
self.dt = dt # 时间步长
self.integral = 0 # 积分项
self.prev_error = 0 # 上一次误差
def compute(self, setpoint, output, disturbance=0):
# 计算误差
erro 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2011
2011




 到【灌水乐园】发言
到【灌水乐园】发言







