







 该文提出了一种基于GPS轨迹的视觉定位精度评估方法。通过将定位轨迹与GPS轨迹进行相似变化对齐,计算两者最大距离来判断定位质量。通过设定阈值,评估定位轨迹在特定时间窗口内的合格率,进而得出定位质量评分。实验表明,此方法在大多数情况下有效,尤其适用于消费级GPS。使用不同窗口大小可检测不同频率误差,且讨论了可能的改进方案,如直接点对点对齐和综合评估标准。
该文提出了一种基于GPS轨迹的视觉定位精度评估方法。通过将定位轨迹与GPS轨迹进行相似变化对齐,计算两者最大距离来判断定位质量。通过设定阈值,评估定位轨迹在特定时间窗口内的合格率,进而得出定位质量评分。实验表明,此方法在大多数情况下有效,尤其适用于消费级GPS。使用不同窗口大小可检测不同频率误差,且讨论了可能的改进方案,如直接点对点对齐和综合评估标准。
目的:
- 基于地图的视觉定位不能直接用绝对位置和gps来比较精度。因为定位地图不一定完全和gps对齐了的。所以只能使用gps的相对变化和定位结果的相对变化的对比来评估定位精度。
- 并且gps在局部也不一定准,如果把gps的完整轨迹和定位出来的轨迹直接做对齐然后比差异的话,这样并不能知道是具体哪个位置定位不准。
描述:
- 使用GPS轨迹来评估基于视觉的定位结果的质量。将定位轨迹分段后和GPS轨迹做相似变化,得到和GPS轨迹对齐的定位轨迹。基于这两条轨迹的最大距离来判断定位质量的好坏。
- 当时GPS轨迹的局部变化趋势和汽车的真实运动轨迹的局部变化趋势一致。如果定位结果可靠,定位得到的轨迹的局部变化趋势也应该和GPS一致。本专利利用这一规律来判断定位的质量。
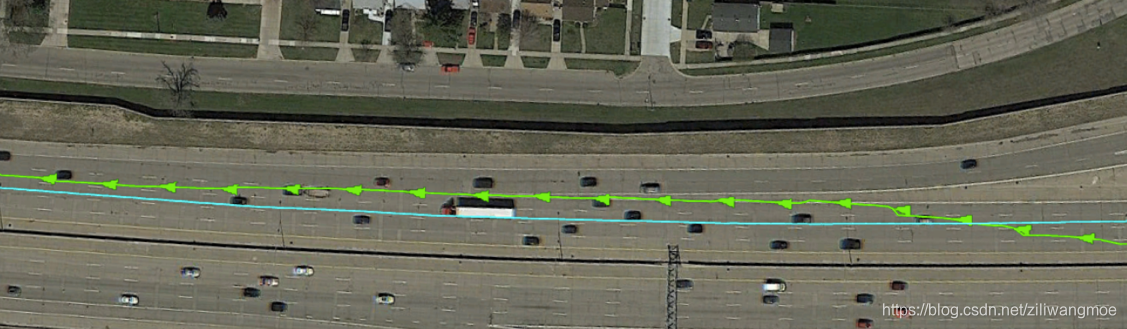
- 蓝色线为GPS轨迹,绿色线为计算的汽车轨迹。可以看出蓝色线很平滑,绿色线相对蓝色线有高频的抖动。通过这个信息可以得出这一时段的定位精度很低。
细节:
-
输入数据:
-
一段时间内定位的轨迹(每个时刻对应的定位结果坐标值)
-
这段时间对应的GPS轨迹
-
-
对某一个时刻的定位质量评估
-
以当前时刻为中心,取出定位轨迹前后各10秒区间的曲线:traj。
-
以当前时刻为中心,取出GPS轨迹前后各10秒区间的曲线:gps。
-
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 780
780

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









