






一、一键安装ROS
ctrl+alt+t 打开终端,输入以下代码:
wget http://fishros.com/install -O fishros && bash fishros
回车,得到以下结果:
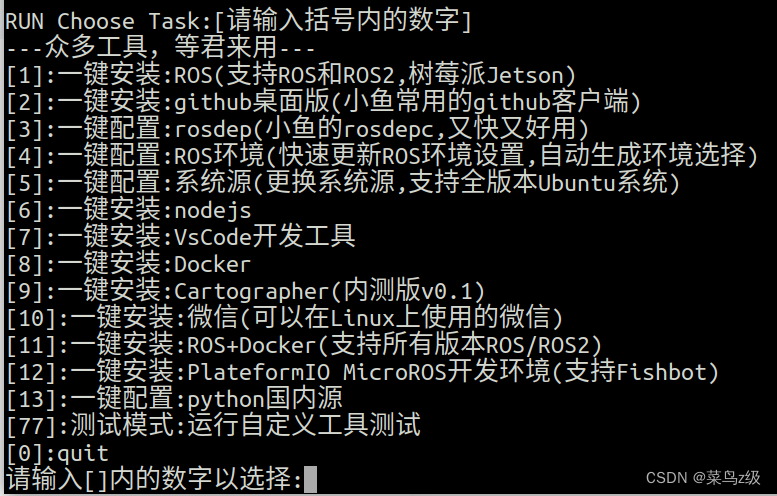
1、配置系统源
输入5
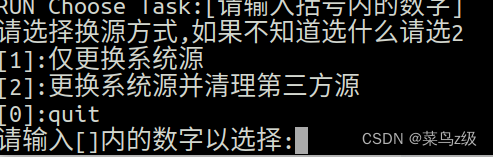
先输入2,下一步输入1
![]()
2、安装ros
按 ↑ 键,再次生成上次的输入
wget http://fishros.com/install -O fishros && bash fishros
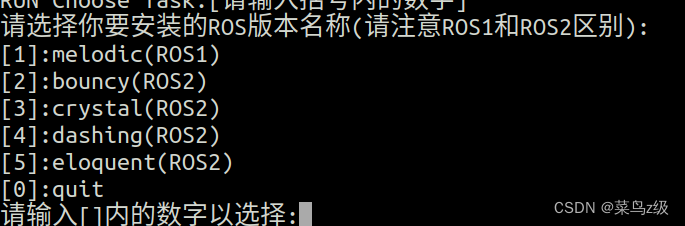
输入1

输入1,下一步输入1,得到下图显示,选择自己的版本,这里选择1
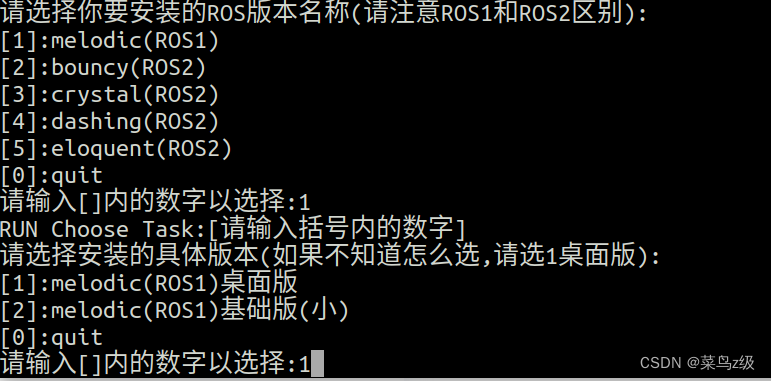
显示安装成功了就可以了
3、安装rosdep
如前两步,打开初始界面,选择3
![]()
rosdepc update
更新完成即可
4、更新ROS环境设置
打开初始界面,选择4
二、测试
重新打开一个终端,输入
roscore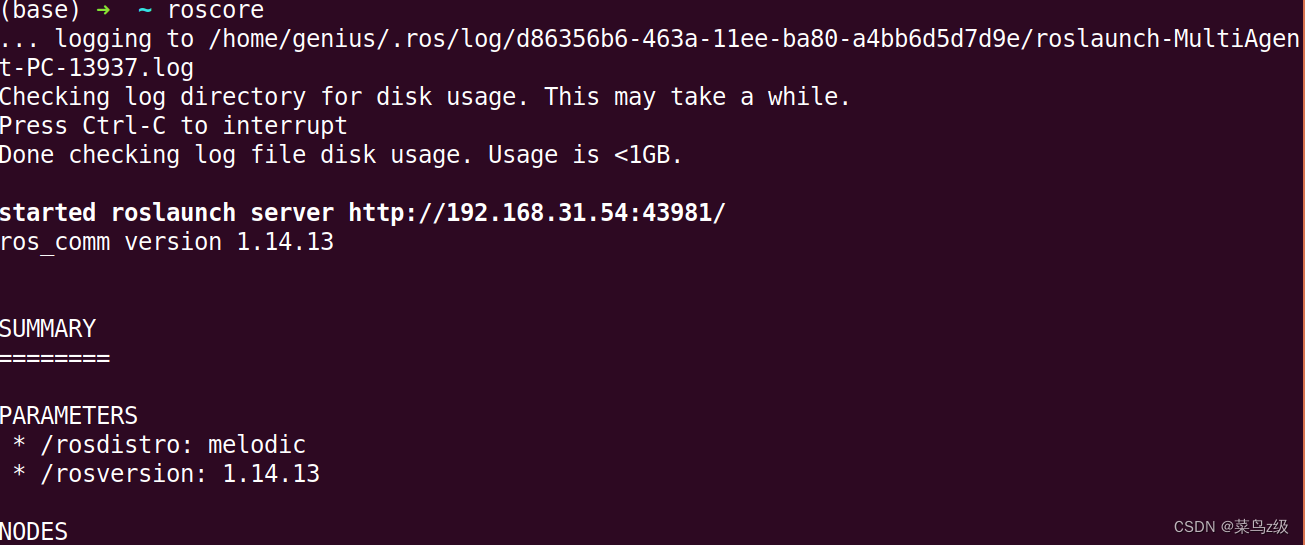 再打开一个终端,输入:
再打开一个终端,输入:
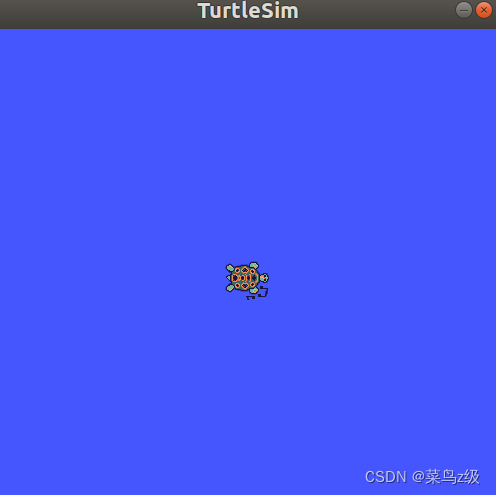
rosrun turtlesim turtlesim_node
继续新打开一个终端,输入
rosrun turtlesim turtle_teleop_key出现一个通过前后左右控制的乌龟,即成功。
三、问题与解决
问题:测试无法正常运行,提示网络配置不对
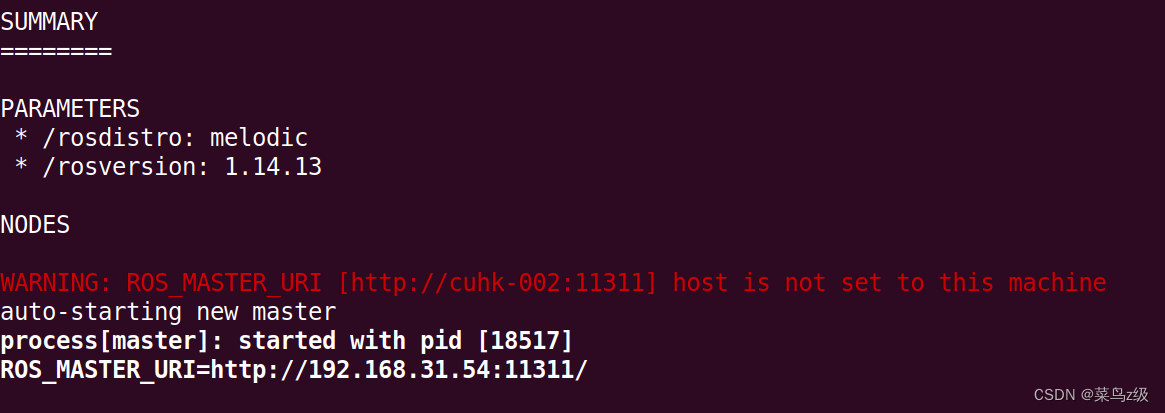
查看网上方法应该是主从机配置原因
解决方法:
目前找到的解决方法是,在每个命令前加上:
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311

但是这样子操作非常麻烦,等待找到更好的方法。

















 1207
1207

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









