



 本文介绍了ROS环境下Rviz的安装过程,包括前期虚拟机USB设置和安装步骤。接着详细讲解了gazebo仿真的概念、特点以及安装方法,包括解决安装过程中可能出现的问题,并展示了gazebo的界面和验证其与ROS连接的方法。
本文介绍了ROS环境下Rviz的安装过程,包括前期虚拟机USB设置和安装步骤。接着详细讲解了gazebo仿真的概念、特点以及安装方法,包括解决安装过程中可能出现的问题,并展示了gazebo的界面和验证其与ROS连接的方法。
这里写目录标题
Rviz的安装
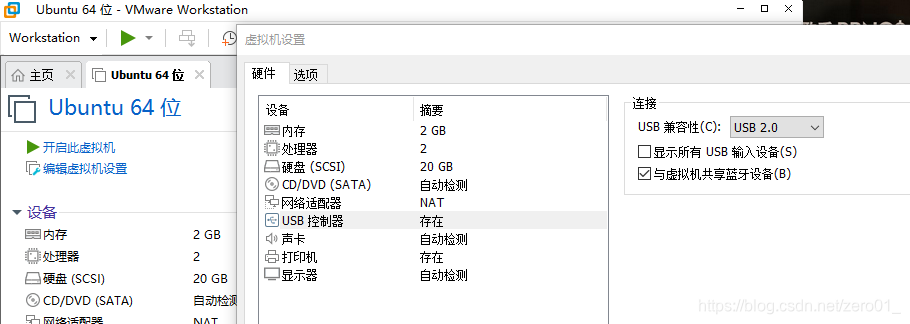
- 前期准备:打开i虚拟机USB设置,将兼容性设置成2.0:
- Rviz的安装:
用rosdep install rviz语句下载源文件

再用rosmake rviz语句进行编译:
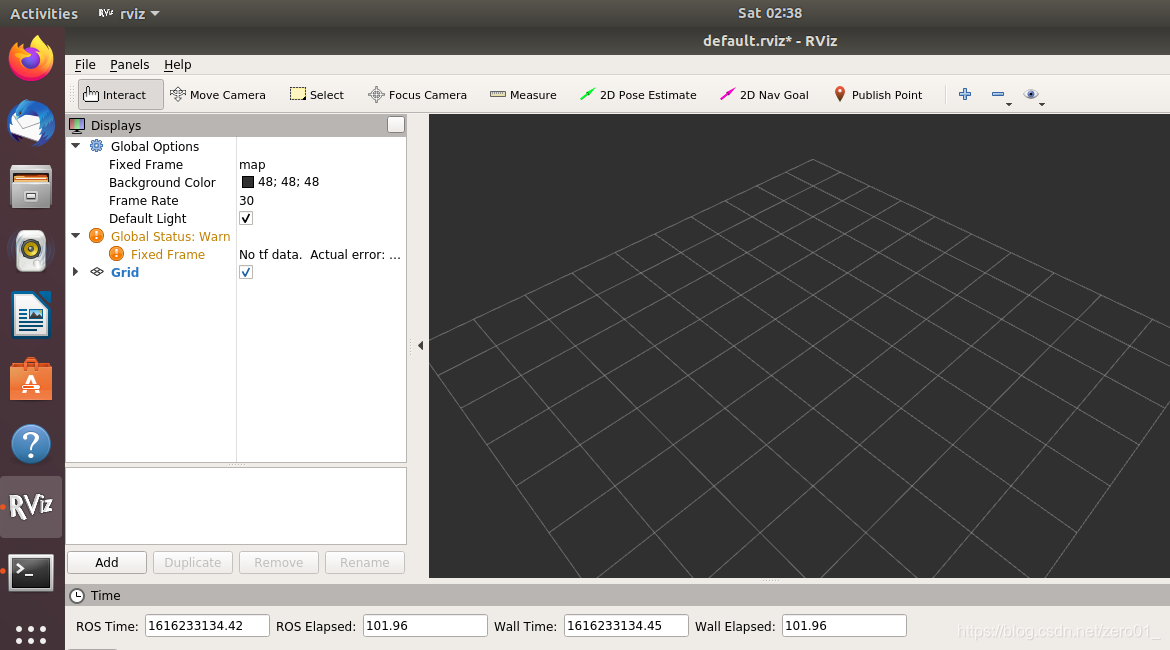
- 安装完成后可用
roscore 以及rviz命令打开rviz,显示界面如下:
由于博主用的是台式机而非笔记本,并没有摄像头这一工具,故使用摄像头的这部分就暂且搁置。
gazebo仿真
- gazebo仿真简介:
gazebo是一款功能强大的三维物理仿真平台;具有强大的物理引擎;
高质量的图形渲染;
方便的编程与图形接口;
开源免费
azebo中的机器人模型与rviz使用的模型相同,但是需要在模型中加入机器人和周围环境的物理属性,例如质量、摩擦系数、弹性系数等。机器人的传感器信息也可以通过插件的形式加入仿真环境,以可视化的方式进行显示。
- gazebo特点:
动力学仿真:支持多种高性能的物理引擎,例如ODE、Bullet、SimBody、DART等。
三维可视化环境:支持显示逼真的三维环境,包括光线、纹理、影子。
传感器仿真:支持传感器数据的仿真,同时可以仿真传感器噪声。
**可扩展插件:**用户可以定制化开发插件,扩展gazebo的功能,满足个性化的需求。
多种机器人模型:官方提供PR2、Pioneer2 DX、TurtleBot等机器人模型,当然也可以使用自己创建的机器人模型。
TCP/IP传输:gazebo可以实现远程仿真,后台仿真和前台显示通过网络通信。
云仿真:gazebo仿真可以在Amazon、Softlayer等云端运行,也可以在自己搭建的云服务器上运行。
终端工具:用户可以使用gazebo提供的命令行工具在终端实现仿真控制。
- 安装gazebo
在终端中使用以下命令来安装和打开gazebo:roscore和 rosrun gazebo_ros gazebo
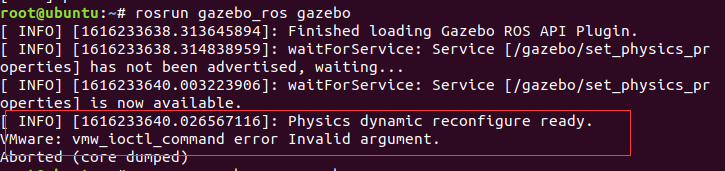
发现报错了,输入以下指令即可解决报错:export SVGA_VGPU10=0:
gazebo打开如下:
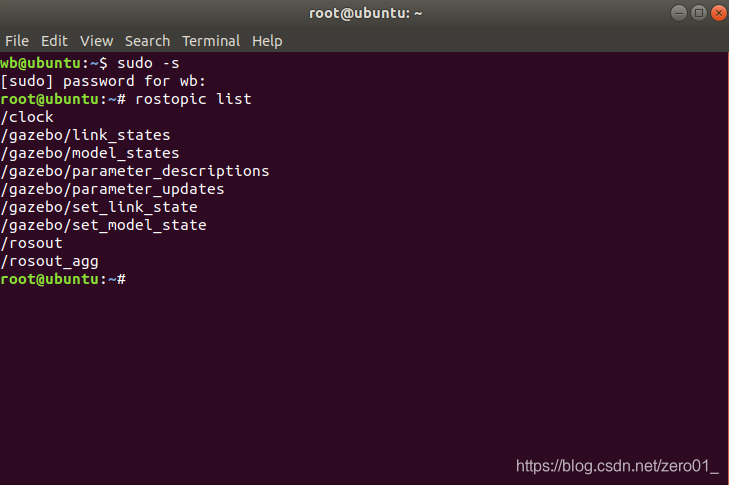
- 可用
rostopic list验证gazebo是否与ROS系统成功连接,可以查看ROS的话题列表,如果连接成功,应该可以看到gazebo发布/订阅的如下话题列表:
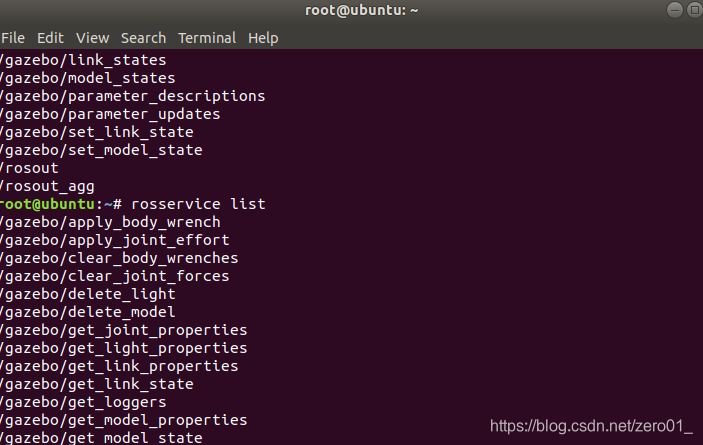
- gazebo提供的服务列表
- gazebo界面如下所示
- 绘制一个简单的模型如下:

















 103
103

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









