



 本文介绍了ROS(机器人操作系统),一种为异质计算机集群提供的软件平台。它提供了标准操作系统服务,如硬件抽象、设备控制等功能。ROS主要运行于Ubuntu系统,并且遵循开放的BSD协议。文中还详细介绍了ROS的安装步骤及如何运行一个小海龟Demo程序。
本文介绍了ROS(机器人操作系统),一种为异质计算机集群提供的软件平台。它提供了标准操作系统服务,如硬件抽象、设备控制等功能。ROS主要运行于Ubuntu系统,并且遵循开放的BSD协议。文中还详细介绍了ROS的安装步骤及如何运行一个小海龟Demo程序。
ROS
-
什么是ROS
ROS系统是机器人操作系统。机器人操作系统是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能。ROS提供一些标准操作系统服务,例如硬件抽象,底层设备控制,常用功能实现,进程间消息以及数据包管理。ROS是基于一种图状架构,从而不同节点的进程能接受,发布,聚合各种信息(例如传感,控制,状态,规划等等)。目前ROS主要支持Ubuntu操作系统。 -
ROS产生发展和壮大的原因和意义
本世纪开始,关于人工智能的研究进入了大发展阶段,包括全方位的具体的 AI ,例如斯坦福大学人工智能实验室STAIR(Stanford Artificial Intelligence Robot)项目,该项目组创建了灵活的、动态的软件系统的原型,用于机器人技术。
在2007年,机器人公司Willow Garage和该项目组合作,他们十分具有前瞻性的,提供了大量资源进一步扩展了这些概念,经过具体的研究测试实现之后,无数的研究人员将他们的专业性研究贡献到ROS核心概念和其基础软件包,这期间积累了众多的科学研究成果。
ROS软件的开发自始至终采用开放的BSD协议,在机器人技术研究领域逐渐成为一个被广泛使用的平台。
Willow Garage公司和斯坦福大学人工智能实验室合作以后,在2009年初推出 ROS0.4,这是一个测试版的 ROS,现在所用的系统框架在这个版本正式开启了 ROS 的发展成熟之路。
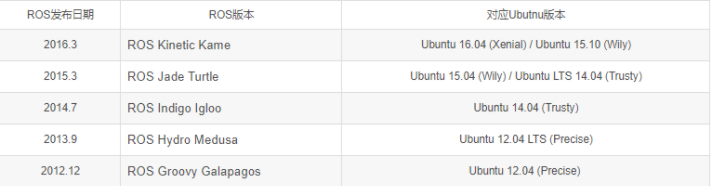
在Ubuntu16系统中安装ROS
-
Ubuntu和对应的ROS版本图示:
详细安装步骤可参考博客:https://blog.youkuaiyun.com/qq_44830040/article/details/106049992
博主完全是按照上述步骤来做的,可以安装成功。 -
运行小海龟Demo程序
在终端一次输入以下程序即可运行小海龟demo程序:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
- ROS常用基本命令
1.查看ROS_PACKAGE_PATH环境变量
$ echo $ROS_PACKAGE_PATH
/home/saneri/catkin_ws/src:/opt/ros/kinetic/share
2.roscore 命令是你在运行所有ROS程序前首先要运行的命令。
$ roscore
3.rosrun 命令
rosrun 允许你使用包名直接运行一个包内的节点(而不需要知道这个包的路径)。

















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









