






[lio_sam](https://github.com/TixiaoShan/LIO-SAM)

项目结构是这样的:
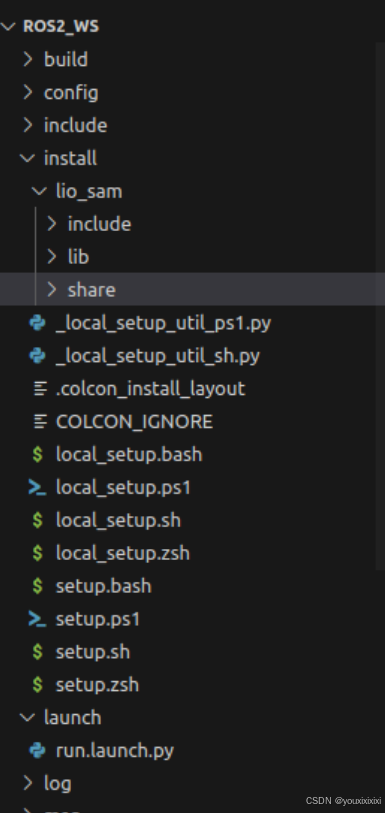
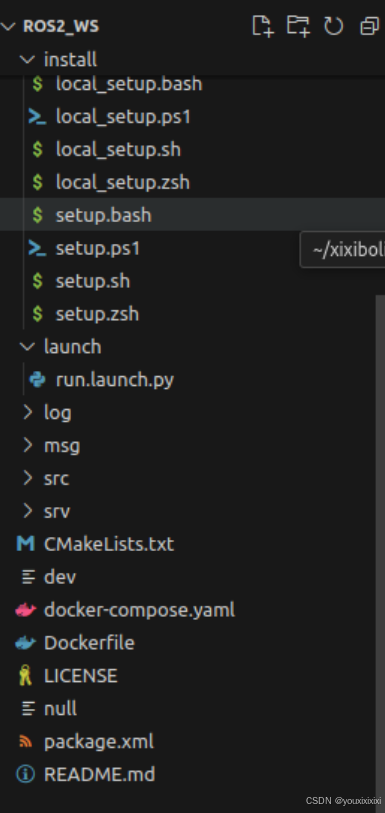
输入`colcon build`后,生成的文件在`./install/lio_sam`下。
输入`echo $AMENT_PREFIX_PATH`查看ament路径,输出:'/opt/ros/humble'。

接着添加路径`export AMENT_PREFIX_PATH=$AMENT_PREFIX_PATH:~/<your_work_dir>/ros2_ws/install/lio_sam`。注意不能有空格。

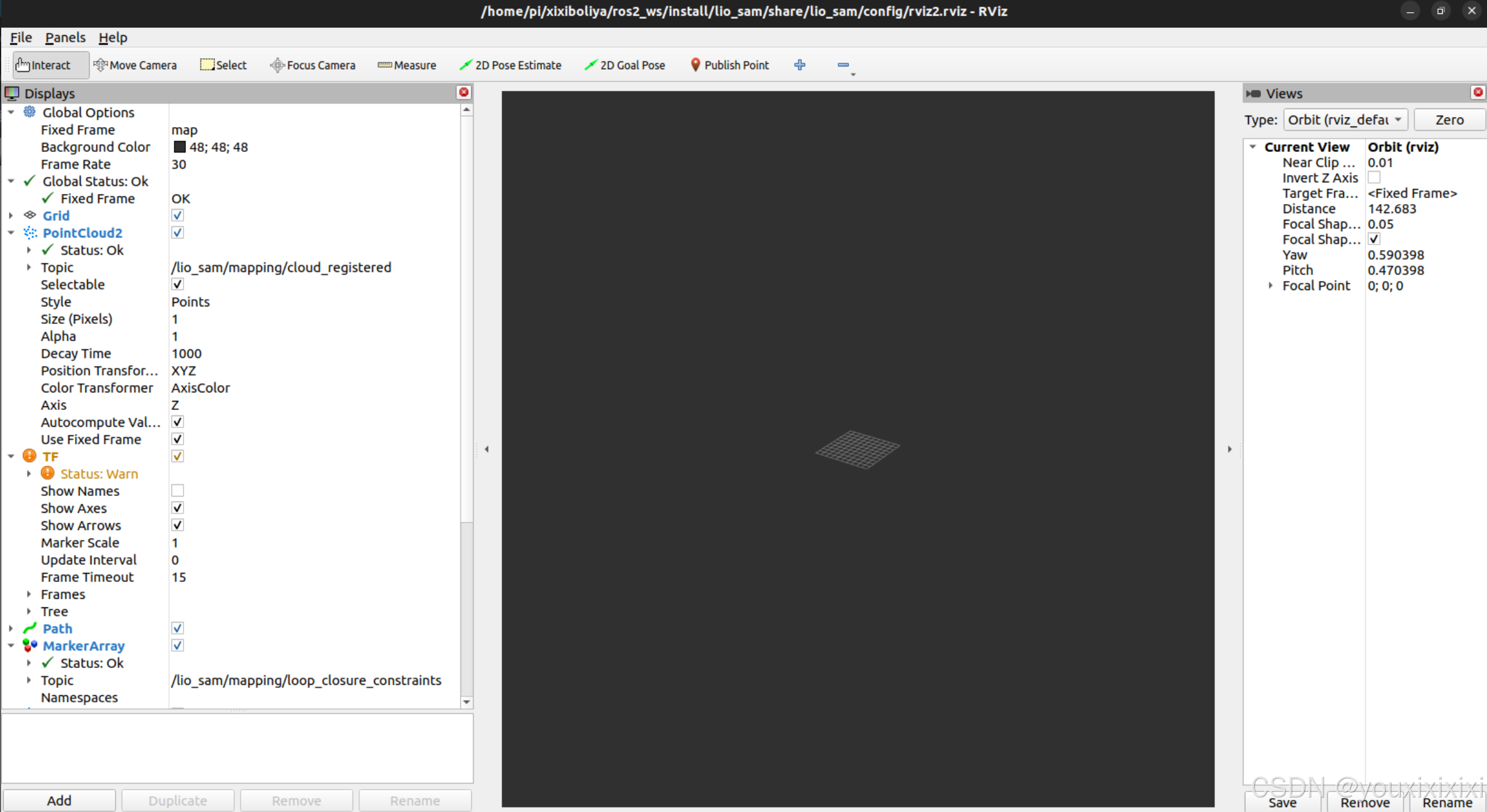
然后

成功。

















 1746
1746

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









