西门子PLC控制KUKA机械臂程序倍率
一、KUKA机械臂先配置好PROFINET
KUKA机械臂配置PROFINET
二、自定义数据变量
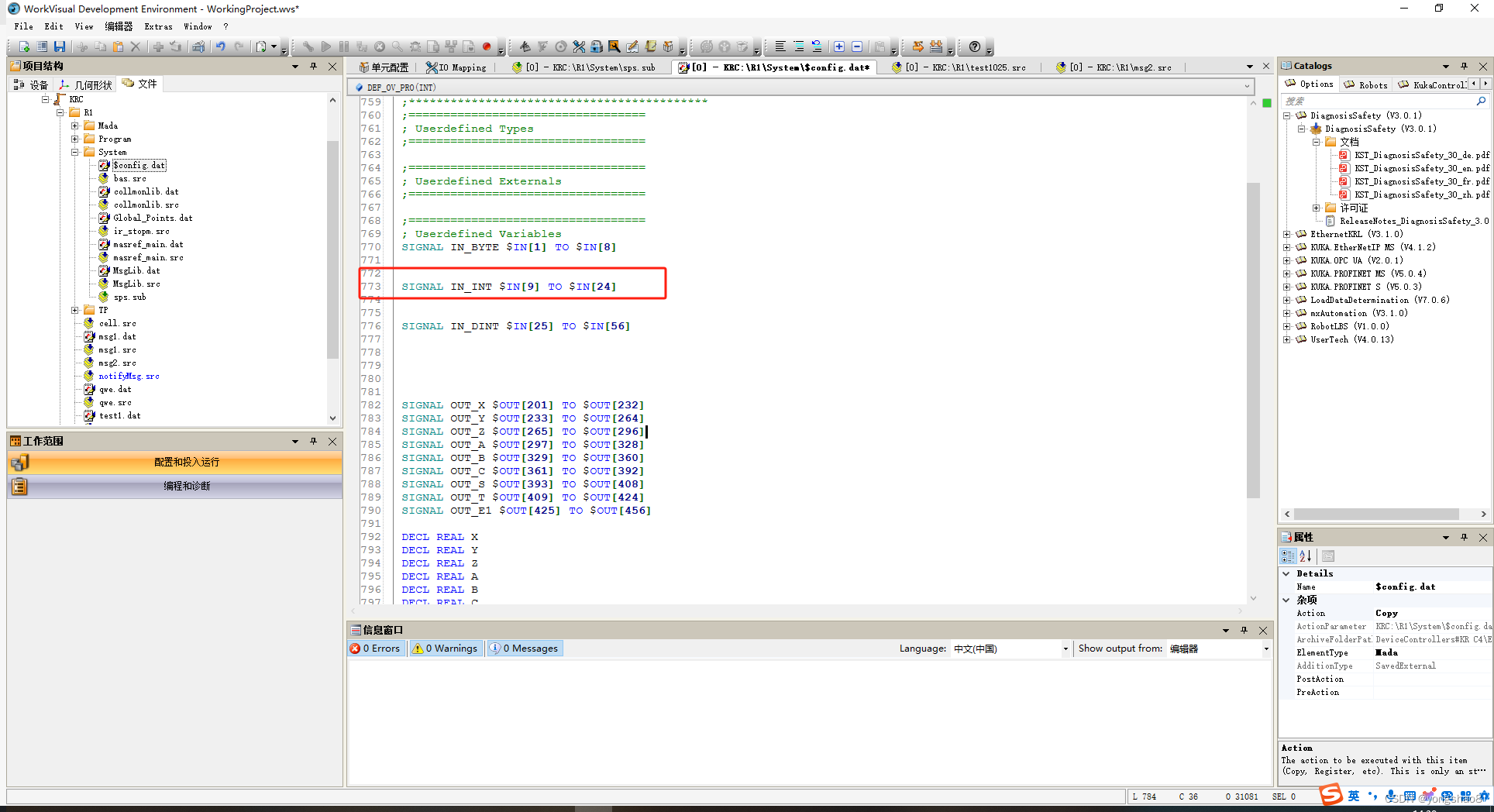
我这里用IN_INT这个变量存放PLC端给过来的数据作为程序倍率。
三、修改程序,关联PLC传过来的数据
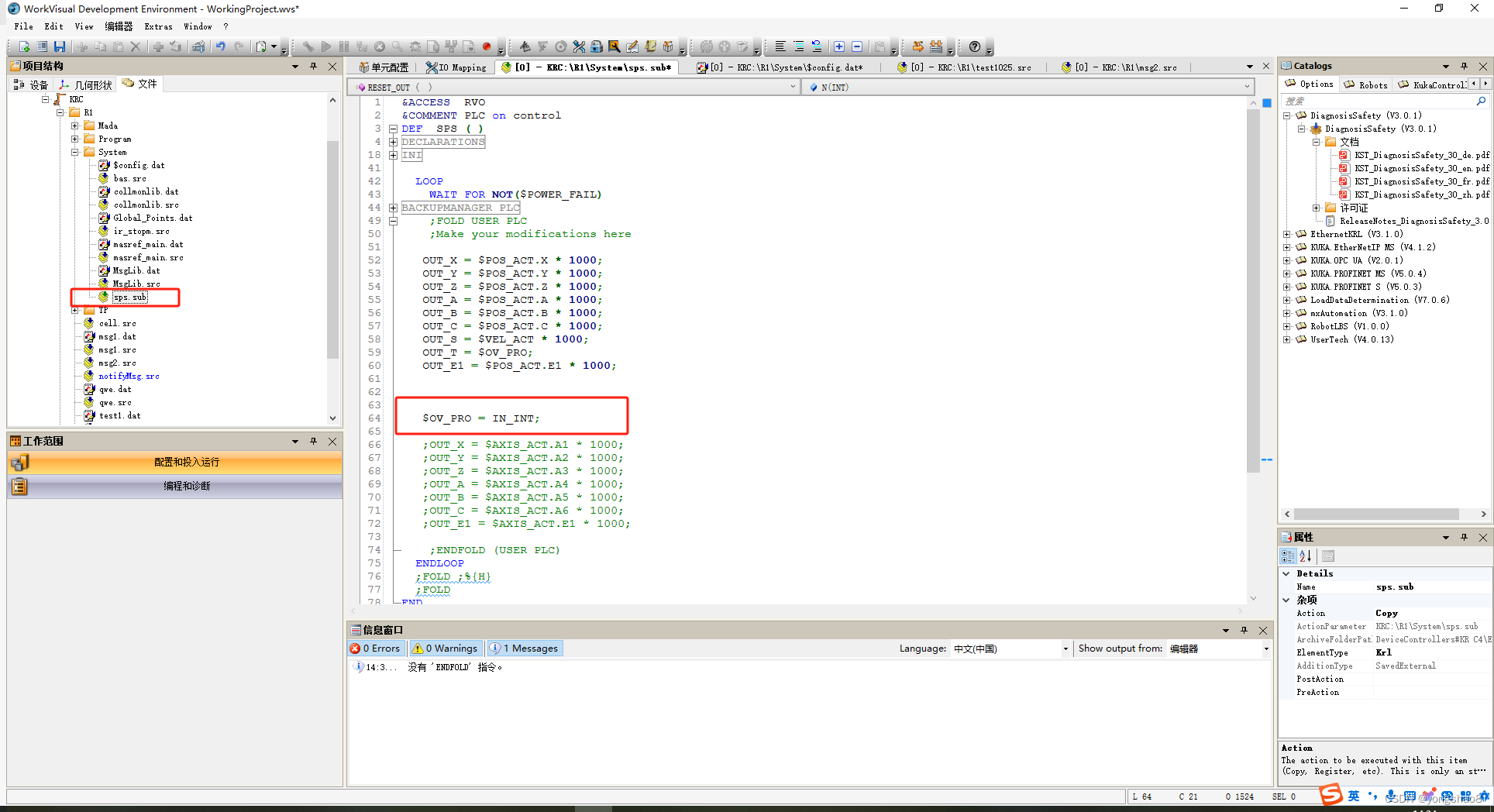
在KRC-R1-System-sps.sub添加修改程序倍率的代码。
$OV_PRO = IN_INT;
$OV_PRO:编程的倍率,范围:0-100的整数。此变量为kuka机械臂的系统变量。
四、生成代码,安装进kuka控制器
五、运行SUBMIT解释器

SUBMIT解释器一旦运行起来了,示教器调整程序倍率的按钮将起不到作用,程序倍率与PLC端发送数据相匹配。
 236
236

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





































