






一、西门子PLC使用111报文控制汇川伺服——绝对值电机回零
1、通过伺服上位机软件直接设置零点
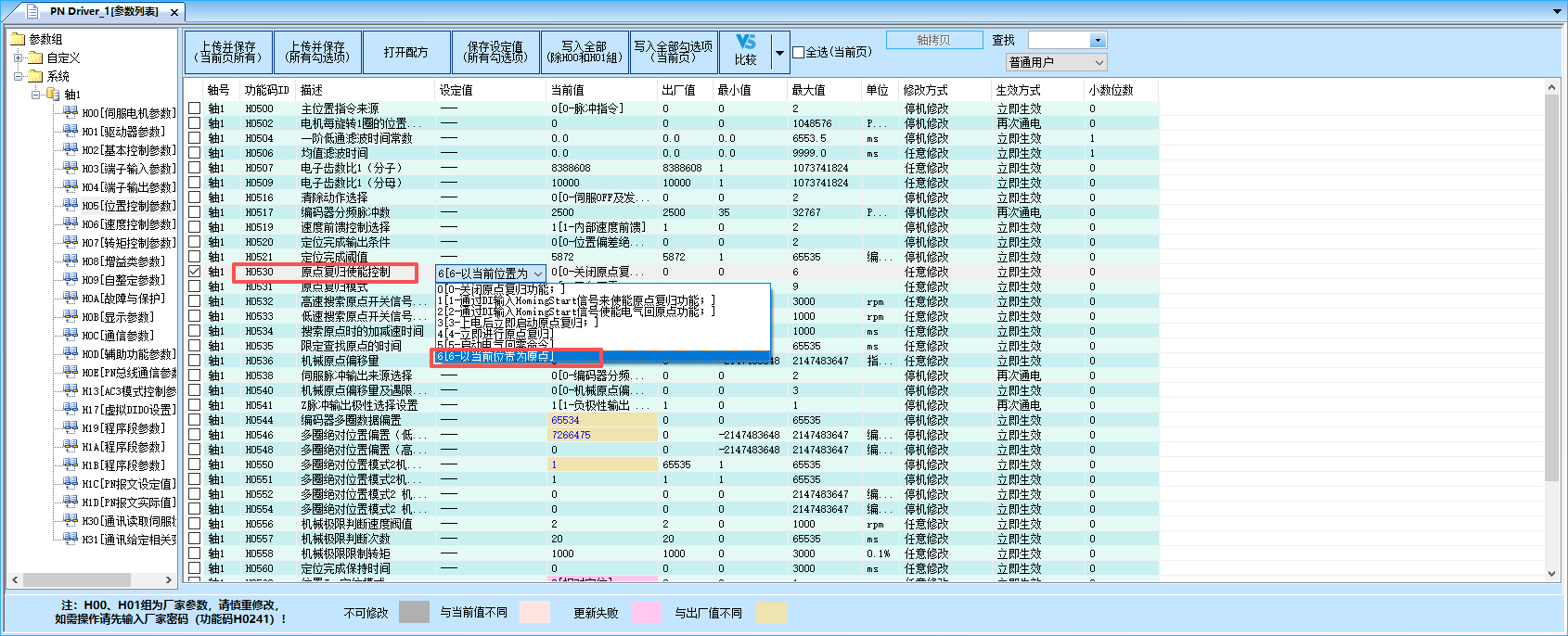
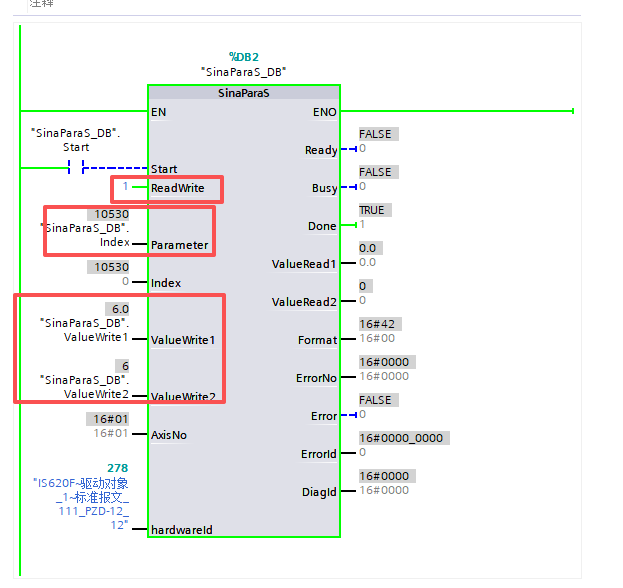
2、通过SinaParaS功能块
通过对伺服驱动器指定地址写入参数,设置零位。(与直接操作上位机设置零位类似)
驱动器地址H0530,对应的10000+5*100+30=10530。
ReadWrite引脚:0为读取;1为写入。
Parameter引脚:你需要待写入或读取的寄存器地址。我这里为10530,上位机驱动器地址为H0530。
ValueWrite1和ValueWrite2引脚:待写入数据的实数类型和双整型值。
给Start引脚上升沿的时候,相当于就把6写入到10530(H0530)这个寄存器了,这时候绝对值编码器数值直接清零。和使用上位机软件操作一样。
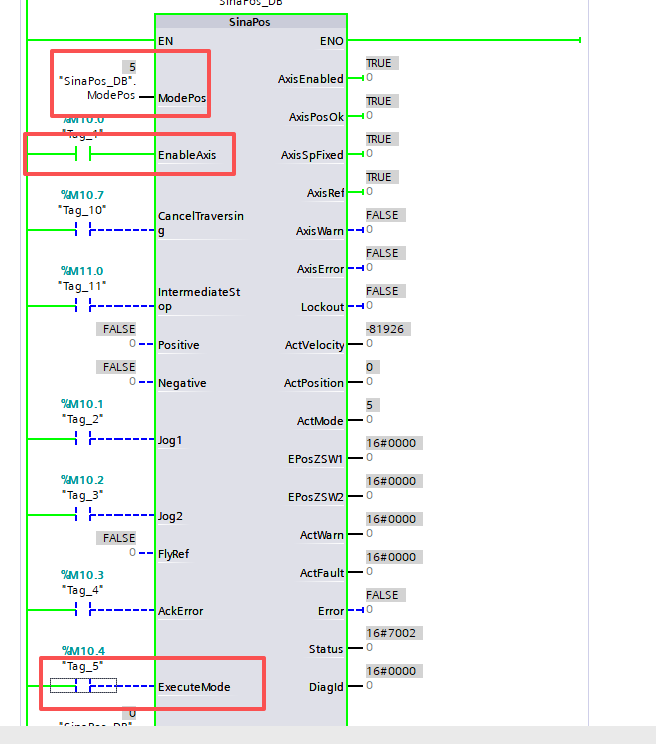
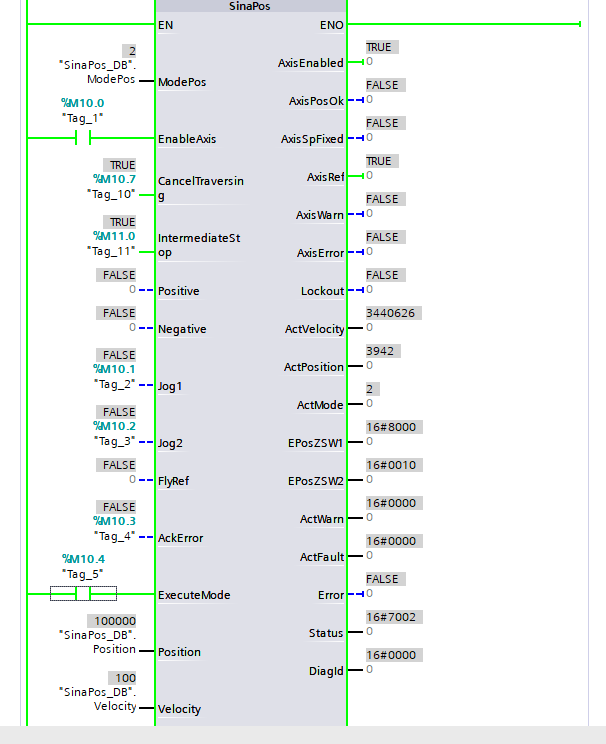
3、通过SinaPos块
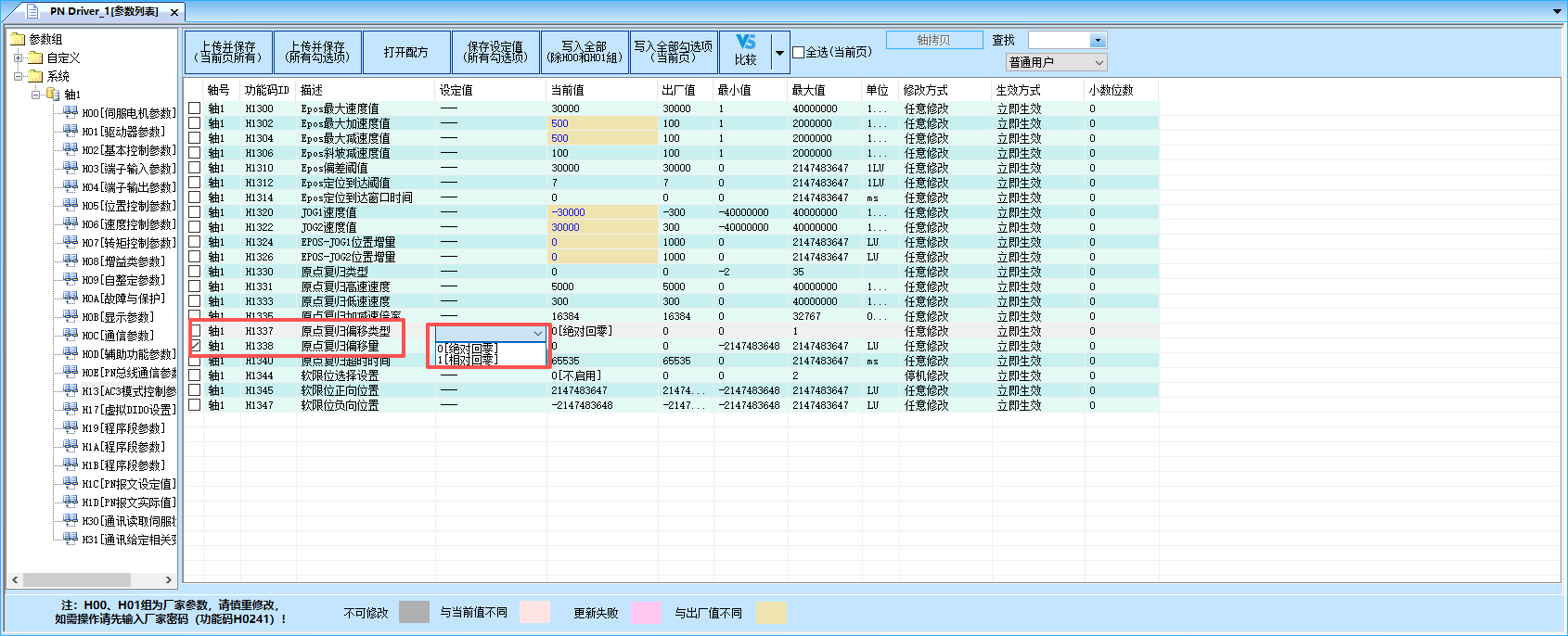
H1337原点复归偏移类型:0为绝对回零;1为相对回零。
H1338原点复归偏移量:设置偏移量
绝对回零类型:触发回零之后,编码器当前数值=H1338的值。
相对回零类型:触发回零之后,编码器当前数值=当前位置+H1338的值。
1、H1337=0,H1338=0
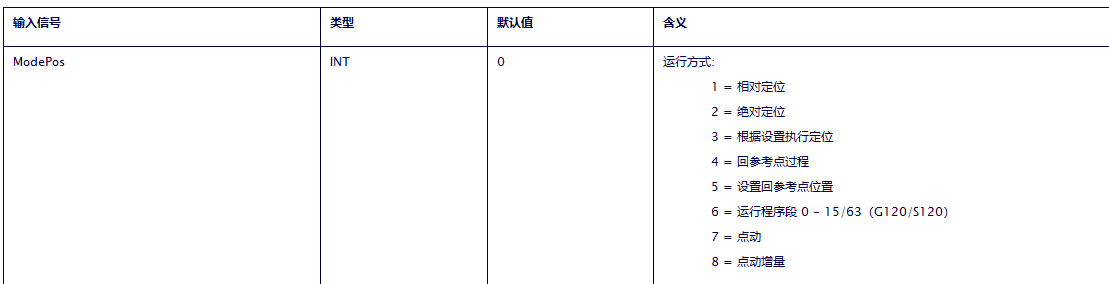
ModePos引脚:5=设置回参考点数值。
EnableAxis引脚:True。处于使能状态
ExecuteMode引脚:给一个上升沿信号,此时程序块开始运行,可以看到ActPosition引脚数值变为0。通过上位机软件查看位置反馈为0。
2、H1337=0,H1338=10000
ExecuteMode引脚:给一个上升沿信号,此时程序块开始运行,可以看到ActPosition引脚数值变为10000。通过上位机软件查看位置反馈为8386808。此时的位置处于零位正转1圈的地方。
我这里用的编码器为23为绝对值编码器,电池齿轮比用的默认8386808/10000。
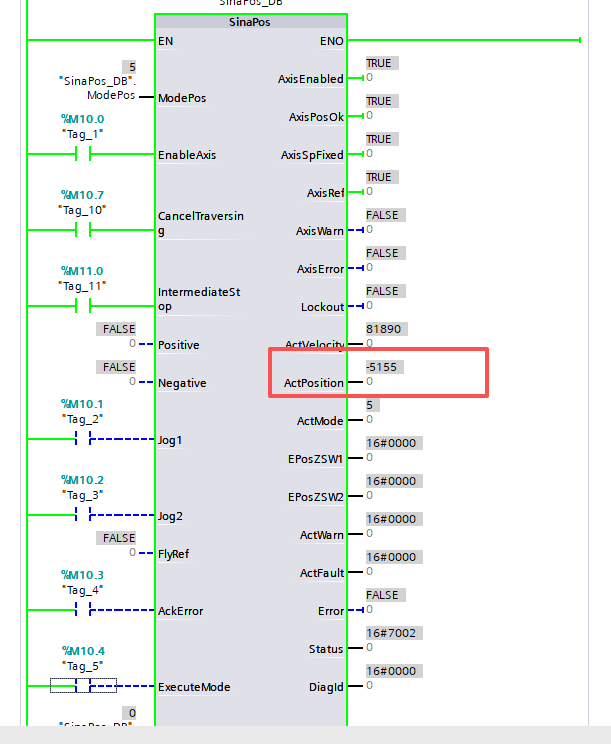
3、H1337=1,H1338=0
ExecuteMode引脚:给一个上升沿信号,此时程序块开始运行,可以看到ActPosition引脚数值变为-5155。此时的位置
处于零位反转0.5圈的地方。
。
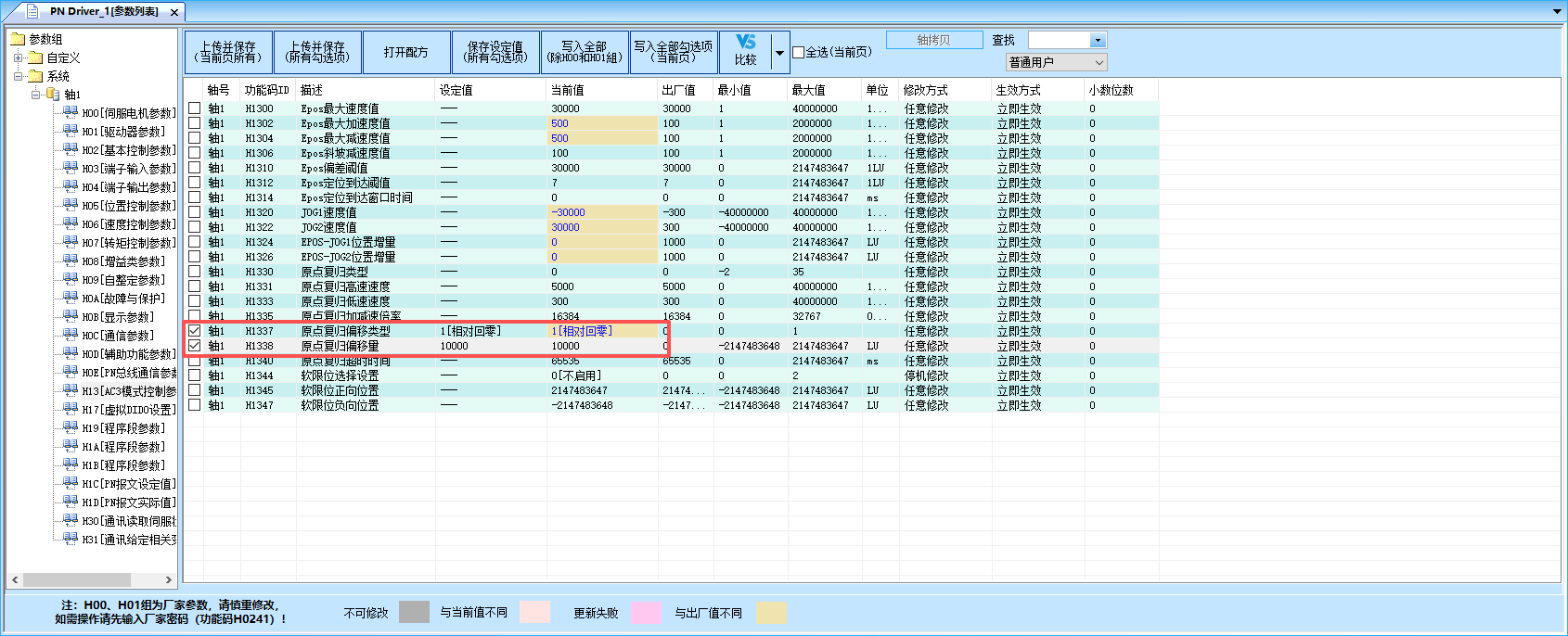
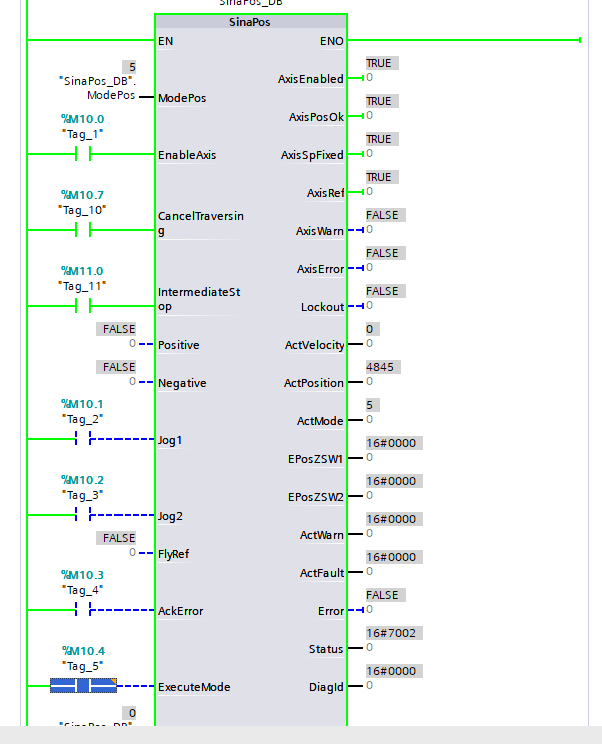
3、H1337=1,H1338=10000
ExecuteMode引脚:给一个上升沿信号,此时程序块开始运行,可以看到ActPosition引脚数值变为4845(-5155+10000=4845)。此时的位置处于零位正转0.5圈的地方。
二、西门子PLC使用111报文控制汇川伺服——绝对定位
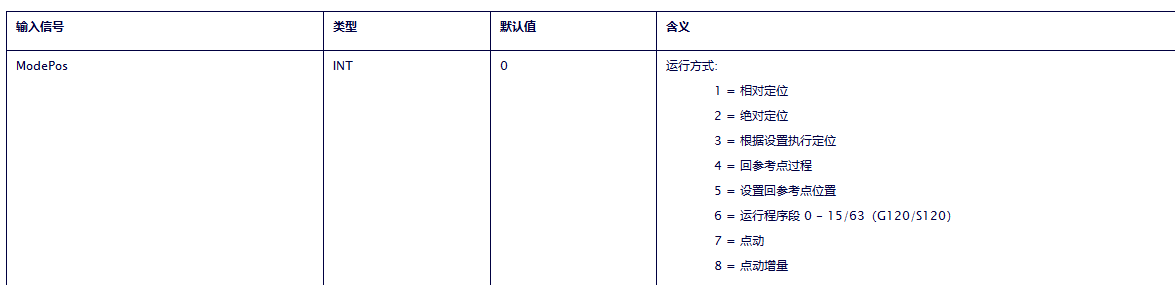
ModePos引脚:2=绝对定位。
EnableAxis引脚:True。处于使能状态
ExecuteMode引脚:给一个上升沿信号,电机开始绝对定位。
电子齿轮比:8386808/10000
Position:电机需要走的位置值,单位LU。这里给的是100000,相当于电机正方向转10圈。
Velocity:电机运行速度值,单位1000LU/min。这你给的是100,实际速度是100 * 1000LU/min = 100000LU/min,电机转速为10rpm。
OverV:速度倍率。这里设置的100。
ActPosition:当前位置。定位完成,这个值为100000。
ActVelocity:当前速度。这个数值跳动比较大。我这里波动中枢值大概为3600000,换算成RPM转速公式,当前转速(rpm)= 额定转速 * ActVelocity / 1073741824。
3000 * 3600000 / 1073741824≈10rpm
AxisPosOk:轴已到达目标位置。当定位完成时,此引脚为True。


















 577
577

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











