




齐次坐标
- 齐次坐标就是将一个原本是n维的向量用一个n+1维向量来表示,是指一个用于投影几何里的坐标系统
- 齐次坐标表示是计算机图形学的重要手段之一,它既能够用来明确区分向量和点,同时也更易用于进行仿射几何变换。
向量表示和点的表示
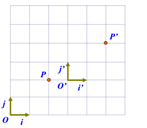
- 一个标准的空间直角坐标系的基向量是a = (1,0,0),b=(0,1,0),c=(0,0,1)。原点为O。
- 我们可以使用基向量a,b,c来表示坐标系中任意一个向量v(vx,vy,vz)的坐标:v=vxa+vyb+vzc。
- 用基向量来表示坐标系中的任意一个点的位置,则需要考虑原点的位置,所以一个点P(px,py,pz)的坐标可以表示为:P = pxa+pyb+pzc+O。
- 点的齐次坐标表示:(x,y,z,1),向量的齐次坐标表示:(x,y,z,0)
- 用矩阵的形式来表示的话,可以表示为
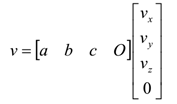
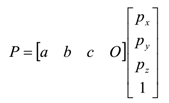
其中最后一个0是向量标志位,1是点标志位。
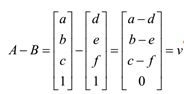
- 点与点相减变为向量,因为最后一个数值变为了0。点与点相加无数学意义。
- 点与向量相加等于点,因为最后一个数值还是1,最后得到一个朝着向量方向移动了向量长度的点。
- 向量与向量相加和相减都等于向量,因为最后一个数值还是0,不过会形成新的向量。
(为什么Unity要用4*4矩阵就是这个原因,用于区分好点和向量,然后对它们进行数学运算)
线性变换(旋转、缩放)
线性变换:从代数上,是指可以保留矢量加和标量乘的变换。
从几何的角度上去理解,需要满足:
(1)变换前是直线的,变换后依然是直线。
(2)直线比例保持不变。
(3)变换前是原点的,变换后依然是原点
仿射变换(旋转、缩放、平移)
仿射变换,从几何的角度去理解,需要满足:
(1)变换前是直线的,变换后依然是直线。
(2)直线比例保持不变。
所以,平移、旋转、缩放都属于仿射变换
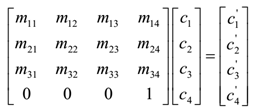
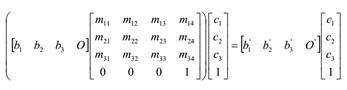
- 仿射变换可以用矩阵和向量相乘的方式来表示。计算一个点或者一个向量,经过平移、旋转、缩放等仿射变换后的值
- 一个三维的变换可以表示为:
2D变换
- 平移
2D平移矩阵:
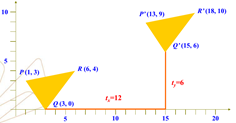
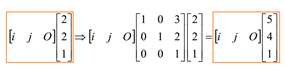
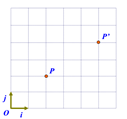
将一个点P(x,y,1)平移(tx,ty)单位到点P',则P'(x+tx,y+ty,1)
- 缩放
2D缩放矩阵:
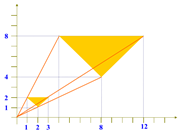
若sx=4,sy=4,点P(2,1,1)缩放后的坐标P'(2*sx,sy,1)。向量也一样
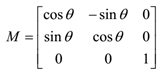
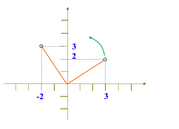
- 旋转
2D旋转矩阵:
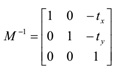
2D变换矩阵的逆矩阵
•平移矩阵的逆矩阵:
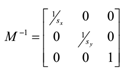
•缩放矩阵的逆矩阵:
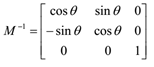
•旋转矩阵的逆矩阵:
物体变换和坐标系变换
物体变换:

坐标系变换:
3D变换
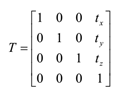
- 平移
3D平移矩阵:
- 旋转
3D缩放矩阵:
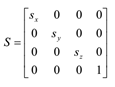
- 缩放
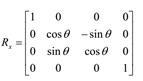
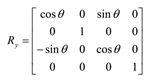
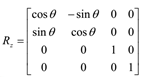
3D旋转矩阵:
X轴 Y轴 Z轴
Unity中的变换
•在Unity中,我们可以使用Matrix4x4.Translate创建一个平移矩阵。
•在Unity中,我们可以使用Matrix4x4.Rotate创建一个旋转矩阵。
•在Unity中,我们可以使用Matrix4x4.Scale创建一个缩放矩阵。
•在Unity中,我们可以使用Matrix4x4.TRS创建一个移动、旋转、缩放的复合矩阵
•在Unity中,我们可以使用Matrix4x4.MultiplyPoint或者Matrix4x4.MultiplyPoint3x4来变换一个点。
•在Unity中,我们可以使用Matrix4x4.MultiplyVector来变换一个向量。

















 13万+
13万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









