









ORBSLAM2运行kitti数据集得到的轨迹txt文件是Nx12的表格,N代表帧数。每一行利用3x4转移矩阵代表左边相机系统位姿,转移矩阵将当前帧左边相机系统中的一个点映射到第0帧的坐标系统中。转移矩阵中平移的部分表示当前相机位置(相对于第0帧)。
CameraTrajectory.txt格式如下:
MATLAB代码如下:
clear all;clc;
filename = 'CameraTrajectory.txt';
fid = fopen(filename);
fseek(fid, 0, 'bof');
lastposition = ftell(fid);
disp(['start position:',num2str(lastposition)]);
orb = [];
while fgetl(fid) ~= -1, % end of line check
fseek(fid, lastposition, 'bof');
line = textscan(fid,'%f %f %f %f %f %f %f %f %f %f %f %f\n',1);
line = [line{:}];
transform = vec2mat(line,4);
orb = [orb; [transform(1,4), transform(3,4)]];
lastposition = ftell(fid);
disp(['lastposition:',num2str(lastposition)]);
end
% display
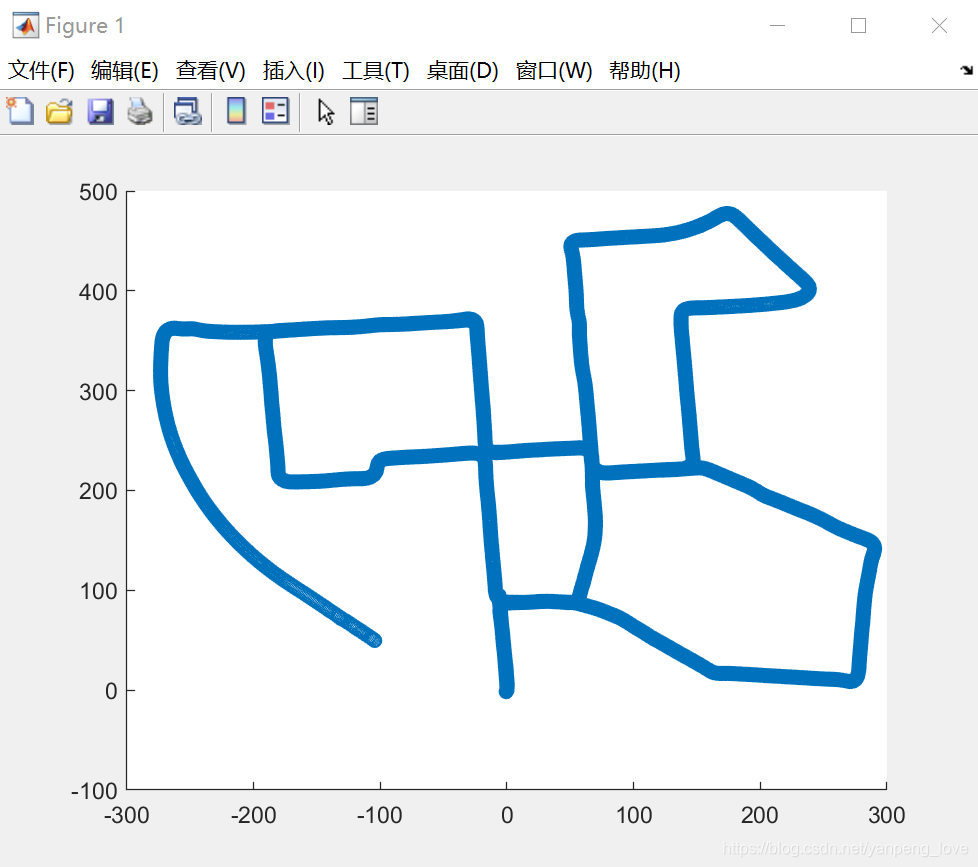
scatter(orb(:,1),orb(:,2));
fclose(fid);ORBSLAM2的轨迹如下:
参考:https://blog.youkuaiyun.com/ykwjt/article/details/88244098
https://blog.youkuaiyun.com/qq_33591712/article/details/83448476

















 1347
1347

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









