







目录
D-H参数
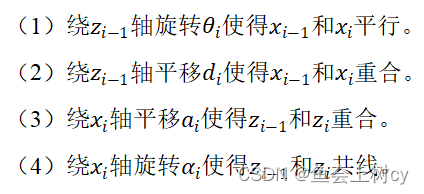
标准型D-H
对于标准型,X轴的方向以当前的Z轴和前一个关节的Z轴(Zi-1轴)的叉乘方向,右手定则:由Zi-1轴转向Z轴,大拇指方向即为X轴方向。由Zi-1轴指向Z轴,公垂线方向即是X轴的方向。
建模步骤:
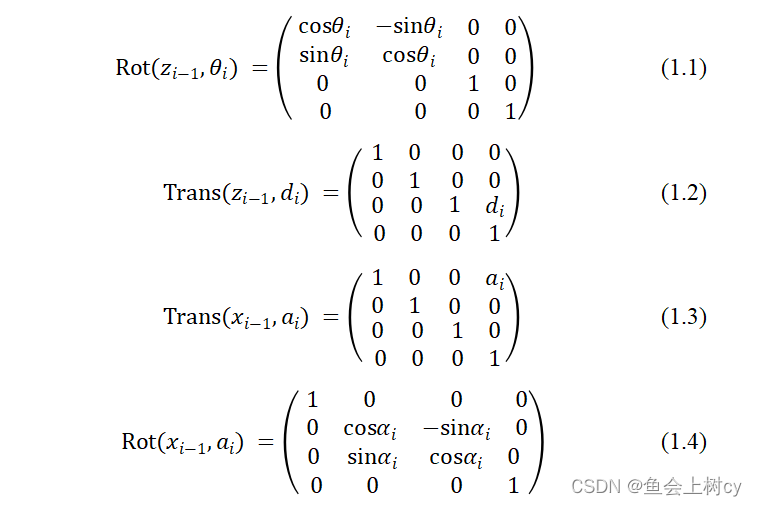
通过每个旋转和平移得到旋转矩阵:
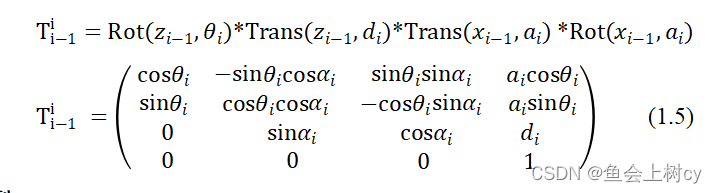
可以得到变换矩阵:
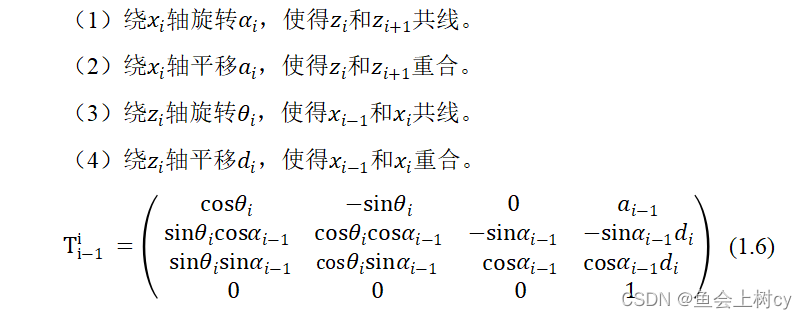
改进型D-H
对于改进型来说,X轴的方向以当前的Z轴和后一个关节的Z轴的叉乘方向,由Z轴转向
轴,大拇指方向即为X轴方向。
建模步骤:
运动学模型建立
假设有六轴机器人的D-H参数如下所示:
| 关节1 | 关节2 | 关节3 | 关节4 | 关节5 | 关节6 | |
| 0 | 90 | 0 | 0 | -90 | 90 | |
| a | 0 | 0 | 425 | 393 | 0 | 0 |
| d | 160.7 | 0 | 0 | 113.3 | 99 | 93.6 |
| 0 | 90 | 0 | -90 | 0 | 0 | |
| 0 | 0 | 0 | 0 | 0 | 0 |
选用改进型的D-H参数,各矩阵分别如下所示:
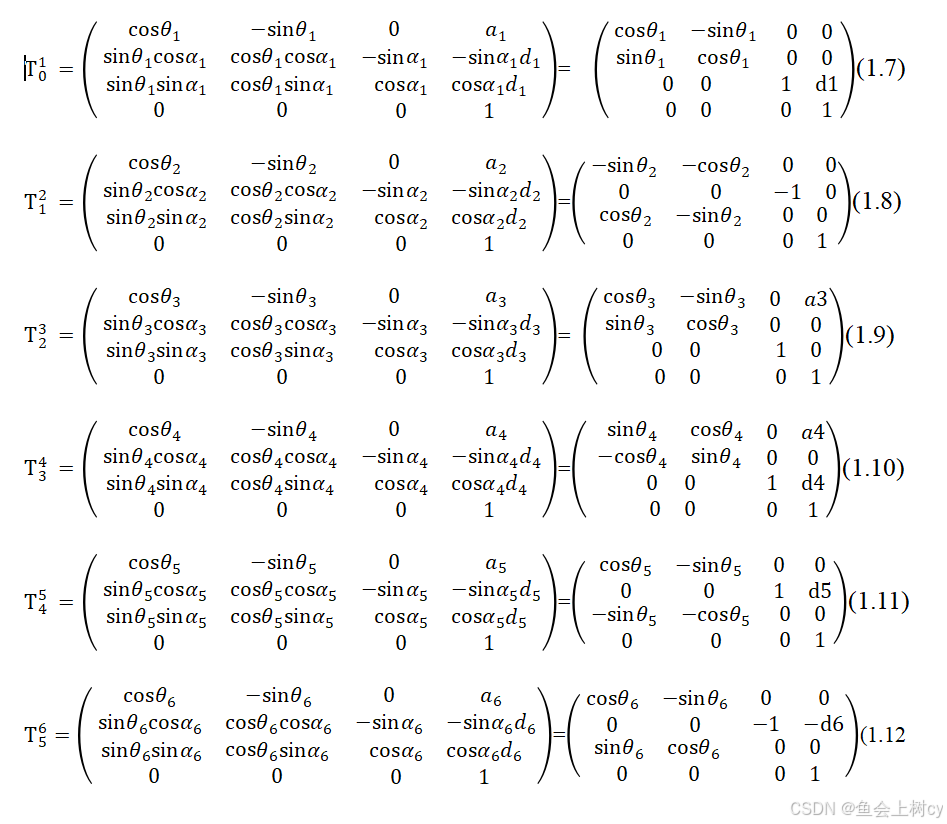
对该六个齐次变换矩阵按顺序相乘后得到六自由度机器人的总变换:

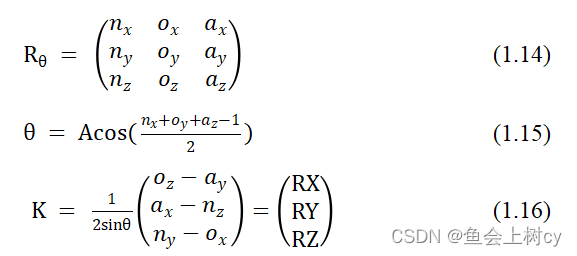
当给定关节角一与关节角6的值时即可确定机器人末端相对于极坐标系的位姿矩阵。但4*4的姿态矩阵并不能直观感受机器人的末端姿态,通常用轴线方式表示。
姿态矩阵转换为轴线表示:
MATLAB仿真验证
% 求齐次变换矩阵
function T = DHTrans(alpha, a, d, theta)
T= [cos(theta) -sin(theta) 0 a;
sin(theta)*cos(alpha) cos(theta)*cos(alpha) -sin(alpha) -sin(alpha)*d;
sin(theta)*sin(alpha) cos(theta)*sin(alpha) cos(alpha) cos(alpha)*d;
0 0 0 1];
endfunction Rxyz=RotMat_AxisAngle(R)
theta = acos((R(1,1)+R(2,2)+R(3,3)-1)/2);
r = 1/2/sin(theta)*[R(3,2)-R(2,3);R(1,3)-R(3,1);R(2,1)-R(1,2)];
Rxyz=theta*r;
end% 输入机器人q1,q2,q3,q4,q5,q6的角度
% 输出末端位姿的轴线表示
function position = modelRobot(theta)
th(1) = theta(1); d(1) = 0.1607; a(1) = 0; alp(1) = 0;
th(2) = theta(2); d(2) = 0; a(2) = 0; alp(2) = pi/2;
th(3) = theta(3); d(3) = 0; a(3) = 0.425; alp(3) = 0;
th(4) = theta(4); d(4) = 0.1133; a(4) = 0.393; alp(4) = 0;
th(5) = theta(5); d(5) = 0.099; a(5) = 0; alp(5) = -pi/2;
th(6) = theta(6); d(6) = 0.0936; a(6) = 0; alp(6) = pi/2;
T01 = DHTrans(alp(1), a(1), d(1), th(1));
T12 = DHTrans(alp(2), a(2), d(2), th(2)+pi/2);
T23 = DHTrans(alp(3), a(3), d(3), th(3));
T34 = DHTrans(alp(4), a(4), d(4), th(4)-pi/2);
T45 = DHTrans(alp(5), a(5), d(5), th(5));
T56 = DHTrans(alp(6), a(6), d(6), th(6));
T06=T01*T12*T23*T34*T45*T56;
axis = RotMat_AxisAngle(T06)/pi*180;
position = [T06(1:3,4:4),axis];
end
机器人工具箱
机器人工具箱的安装一报错解决请看我的博客MATLAB机器人工具箱的安装与问题处理
clc
clear;
% 输入关节角
q(1)=150.1/180*pi;
q(2)=-25.19/180*pi;
q(3)=-35.07/180*pi;
q(4)=-155.82/180*pi;
q(5)=256.86/180*pi;
q(6)=-1.51/180*pi;
%机器人工具箱建立机器人模型
% theta(z) d(z) a(x) alpha(x)
L1=Link([ 0 0.1607 0 0 ],'modified');
L2=Link([ 0 0 0 pi/2 ],'modified');L2.offset = pi/2;
L3=Link([ 0 0 0.425 0 ],'modified');
L4=Link([ 0 0.1133 0.393 0 ],'modified');L4.offset = -pi/2;
L5=Link([ 0 0.099 0 -pi/2 ],'modified');
L6=Link([ 0 0.0936 0 pi/2 ],'modified');
My_Robot=SerialLink([L1,L2,L3,L4,L5,L6],'name','My_Robot');
%----------
%输出结果
data = My_Robot.fkine(q);
result = [data.t,RotMat_AxisAngle([data.n,data.o,data.a])/pi*180];
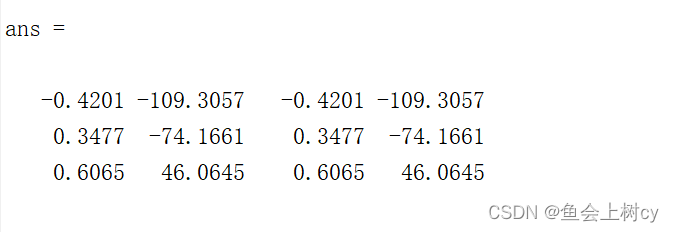
[result,modelRobot(q)]
结果:
2024-06-13 更新:
代码通用性不够,优化了代码,使其更有复用性。
下一章:六自由度机器人运动学逆解

















 598
598

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









