






主要是跟着官方指导与以下教程来的
复现FAST_LIO【Ubuntu 20.04.6 LTS】_fastlio复现-优快云博客
使用Livox-Mid360激光雷达,复现FAST_LIO(保姆级教程)_mid360使用-优快云博客
Livox mid360 激光雷达运行 fast-lio2 详细教程_fastlivo2-优快云博客
这里主要记录自己遇到的一些新的问题。
1.Sophus安装后,编译项目时仍旧找不到
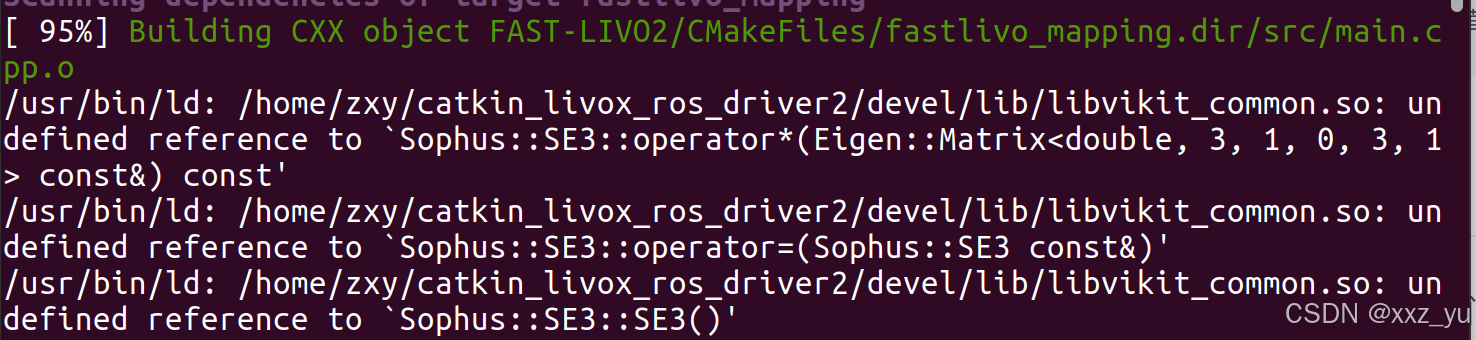
Sophus 链接错误(undefined reference)-优快云博客
2.rviz可视化界面无结果
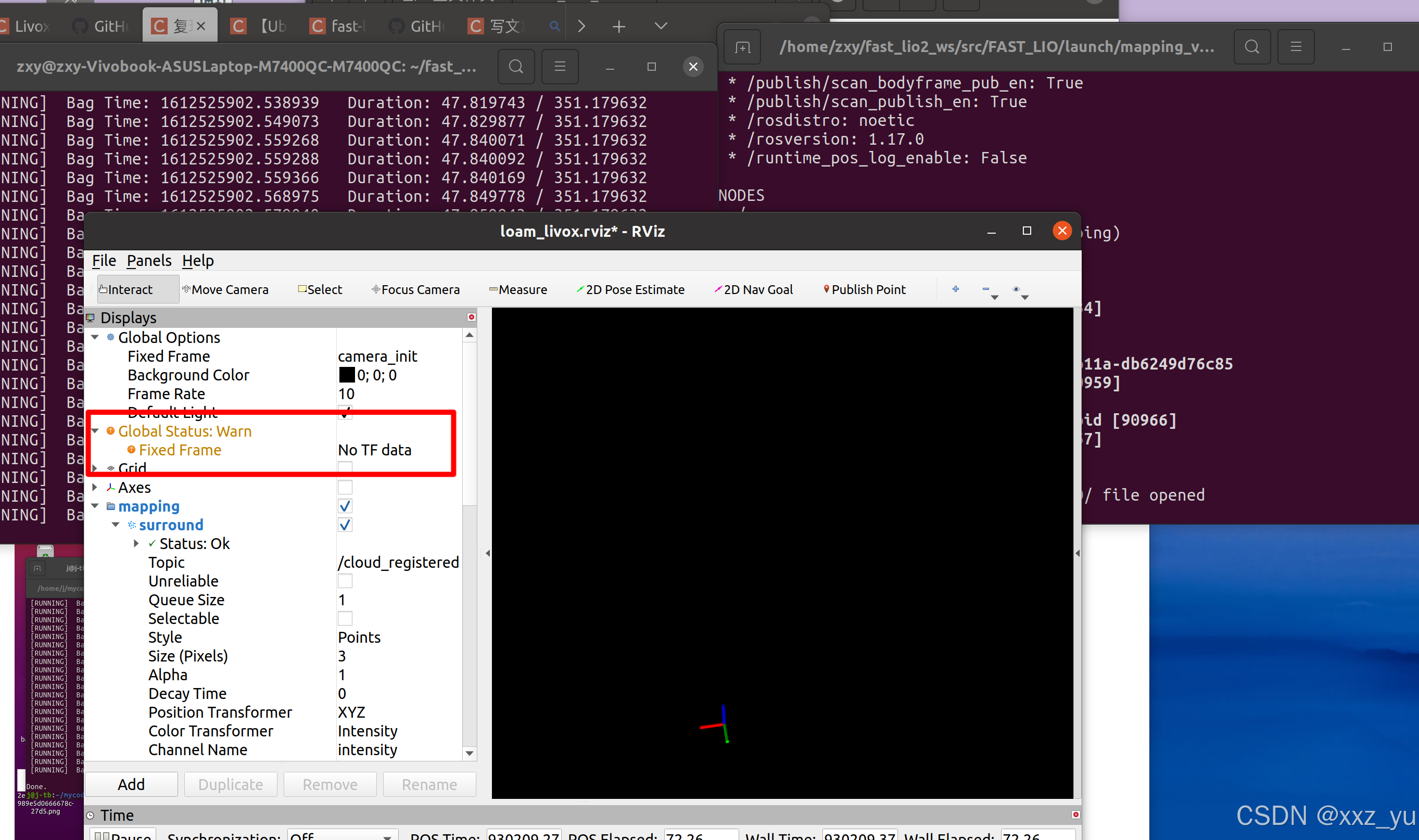
具体表现为编译没有报错,运行时终端也没有错误的提醒,但是rviz界面没有显示,且左侧FFixedFrame不正常。解决方法如下。
1.在运行时,关注
roslaunch fast_lio mapping_avia.launch
mapping_avia 这里,不同的数据集用的可能不同,具体的可以看下面这篇。有错误时,可以把这个换掉试一试其他的。
激光里程计:fast-lio复现_51CTO博客_激光里程计和imu里程计
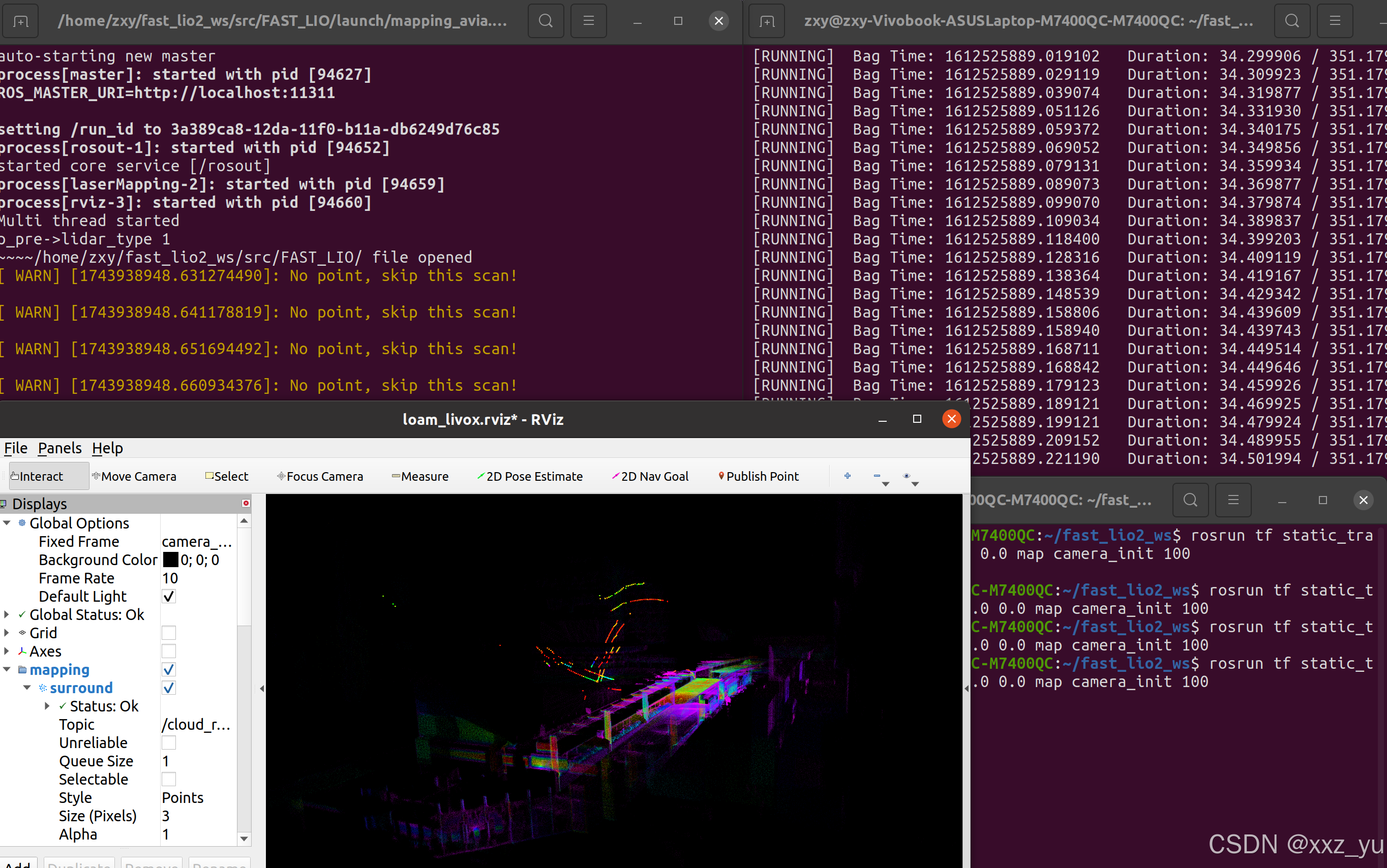
2.修正TFdata的问题
再开一个终端,运行
rosrun tf static_transform_publisher 0.0 0.0 0.0 0.0 0.0 0.0 map camera_init 100
-
0.0 0.0 0.0:平移量为零,表示没有位移。 -
0.0 0.0 0.0:旋转角度为零,表示没有旋转。 -
map:父坐标框架是map。 -
camera_init:子坐标框架是camera_init,表示从map坐标系到camera_init坐标系的变换。 -
100:每秒发布 100 次变换。
这个命令通常用于设置两个坐标框架之间的固定关系。例如:
-
如果你知道激光雷达(LIDAR)的坐标系与地图坐标系之间的关系(例如,它位于地图坐标系的某个位置并且没有旋转),你就可以使用
static_transform_publisher来发布这个静态变换。 -
例如,发布从
map坐标系到camera_init坐标系的静态变换表示相机的位置和方向已经在地图坐标系中固定。
最后运行结果

















 1130
1130

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









