




 本文详细介绍了在ROS2中创建工程、创建功能包(C++和Python)、编写节点源文件、CMake配置、编译和运行程序,以及如何查看和管理ROS2消息的过程。
本文详细介绍了在ROS2中创建工程、创建功能包(C++和Python)、编写节点源文件、CMake配置、编译和运行程序,以及如何查看和管理ROS2消息的过程。
目录
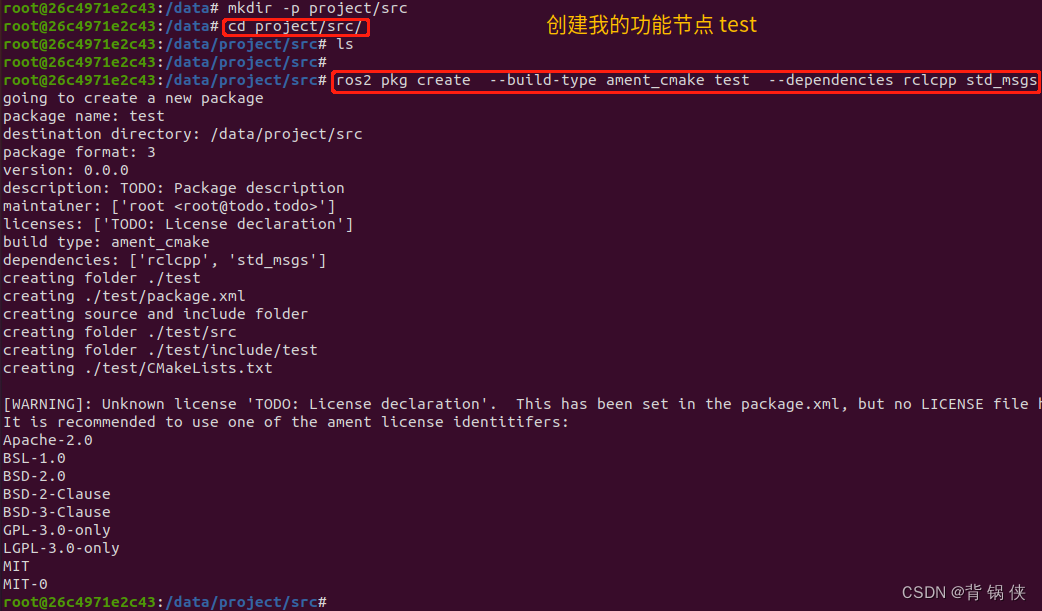
1. 创建工程目录
mkdir -p project/src2. 创建功能包
# 1. 创建 C/C++ 功能包 命令行
ros2 pkg create --build-type ament_cmake node_name --dependencies rclcpp std_msgs
# 2. 创建 Python 功能包 命令行
ros2 pkg create --build-type ament_python node_name
# 注意:
ament_cmake 使用 C/C++ 的功能包
ament_python 使用 Python 功能包
3. 创建节点源文件
1. 进入 src 目录
cd ./project/src/
2. 编写代码:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 441
441

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









