



初次使用livox-mid360,配置
资源下载(github)
寻找相关库
搜索 Livox ,官方标识如下:
点击主页,查看所有库
主页如下:
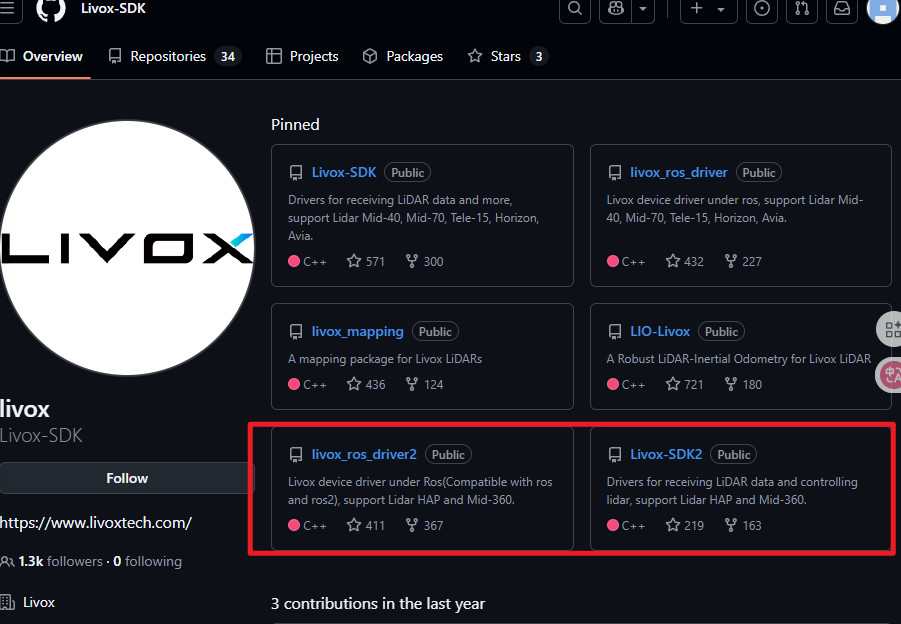
上面两步,可以使用网址直达:https://github.com/Livox-SDK
上图中红框内是本次需要下载的库
ps:不管ros1,还是ros2,无脑选择 2 既可,2是可以兼容1的
Livox-SDK2下载
资源拉取
cd ~
git clone https://github.com/Livox-SDK/Livox-SDK2.git
编译配置
sudo apt install cmake
cd Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
卸载(感觉一般不会有人需要)
sudo rm -rf /usr/local/lib/liblivox_lidar_sdk_*
sudo rm -rf /usr/local/include/livox_lidar_*
livox_ros_driver2下载
拉取livox_ros_driver2
mkdir -p ~/lidar/src
cd ~/lidar/src
git clone https://github.com/Livox-SDK/livox_ros_driver2.git
编译
ros1
./build.sh ROS1
ros2
./build.sh ROS2
根据自己的需要,选择一个执行,执行完该脚本后就不用cmake了
参数配置
(如果有一定基础,可以直接跳转到这里)
上面已经拉取、编译了官方提供的文件,大家都是一样的,下面需要根据自己的设备微调
只需要调一个地方
cd ~/lidar/src/livox_ros_driver2
ged[table] config/MID360_config.json
修改第28行
源代码如下(26-37)
{
"ip" : "192.168.1.12",
"pcl_data_type" : 1,
"pattern_mode" : 0,
"extrinsic_parameter" : {
"roll": 0.0,
"pitch": 0.0,
"yaw": 0.0,
"x": 0,
"y": 0,
"z": 0
修改:“ip” : “192.168.1.12”,找到自己的广播码,类似这种形式:雷达广播码是47MDL1C0010153,在机身侧边寻找
将“.12”修改为“1”+广播码后两位,以我自己的距离,修改后的代码如下
{
"ip" : "192.168.1.153",
"pcl_data_type" : 1,
"pattern_mode" : 0,
"extrinsic_parameter" : {
"roll": 0.0,
"pitch": 0.0,
"yaw": 0.0,
"x": 0,
"y": 0,
"z": 0
接下来,修改的大家都一样,可以直接复制
原代码
},
"host_net_info" : {
"cmd_data_ip" : "192.168.1.5",
"cmd_data_port": 56101,
"push_msg_ip": "192.168.1.5",
"push_msg_port": 56201,
"point_data_ip": "192.168.1.5",
"point_data_port": 56301,
"imu_data_ip" : "192.168.1.5",
"imu_data_port": 56401,
"log_data_ip" : "",
"log_data_port": 56501
}
修改后
},
"host_net_info" : {
"cmd_data_ip" : "192.168.1.50",
"cmd_data_port": 56101,
"push_msg_ip": "192.168.1.50",
"push_msg_port": 56201,
"point_data_ip": "192.168.1.50",
"point_data_port": 56301,
"imu_data_ip" : "192.168.1.50",
"imu_data_port": 56401,
"log_data_ip" : "",
"log_data_port": 56501
}
修改完毕,如果前两步(编译),都成功,那么可以测试了
ps:基本都会成功,如果不成功,看看是不是因为自己使用了虚拟环境,退出即可
测试
ros1
cd ~/lidar
source devel/setup.bash
roslaunch liv[table] rviz_MID360.launch
ros2
cd ~/lidar
source install/setup.bash
ros2 launch liv[table] rviz_MID360.launch
如果可以正常加载显示rviz,那就是连接配置成果,可以通过读取点云,自己处理

















 3134
3134

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









