









 本文详细介绍了如何在两台主机上配置ROS环境以实现多机间的通信。首先通过编辑hosts文件映射各主机名到IP地址,接着设置.bashrc文件以指定ROS主机名和URI。确保所有节点能够正确识别彼此并进行通信。
本文详细介绍了如何在两台主机上配置ROS环境以实现多机间的通信。首先通过编辑hosts文件映射各主机名到IP地址,接着设置.bashrc文件以指定ROS主机名和URI。确保所有节点能够正确识别彼此并进行通信。
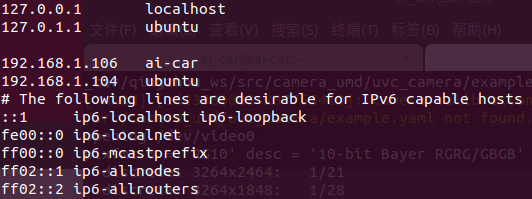
1.主机
sudo vim /etc/hosts
192.168.1.106 ai-car
192.168.1.104 ubuntu
sudo gedit ~/.bashrc
export ROS_HOSTNAME=ubuntu
export ROS_MASTER_URI=http://ai-car:11311

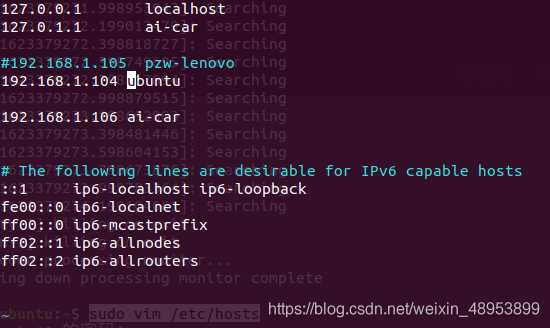
2.从机
sudo vim /etc/hosts
192.168.1.106 ai-car
192.168.1.104 ubuntu
sudo gedit ~/.bashrc
export ROS_HOSTNAME=ai-car
export ROS_MASTER_URI=http://ai-car:11311


















 846
846

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









