






里头是压缩包(将压缩包的名字改成(ROS-Academy-for-Beginners)自取(可以在手机上下载压缩包拷给电脑)
解压在新建的工作空间ttt_ws/src中,
# 创建工作空间目录
mkdir -p ~/ttt_ws/src
# 进入工作空间目录
cd ~/ttt_ws/src
# 初始化工作空间
catkin_init_workspace将教学代码包放进src下
# 回到工作空间根目录
cd ~/ttt_ws
# 编译工作空间会报下列的错
catkin_make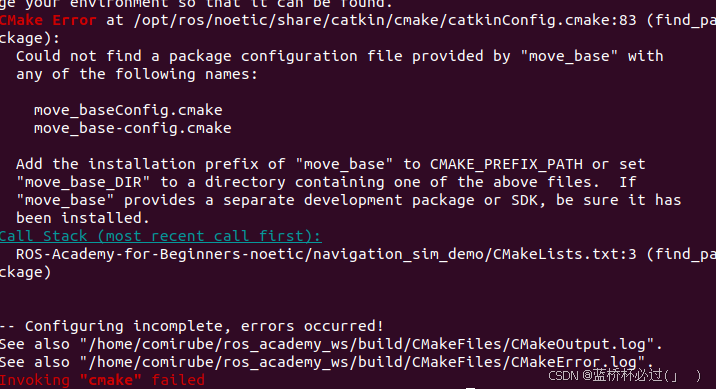
第一个报错找不到move_base
sudo apt-get update
sudo apt-get install ros-noetic-navigation
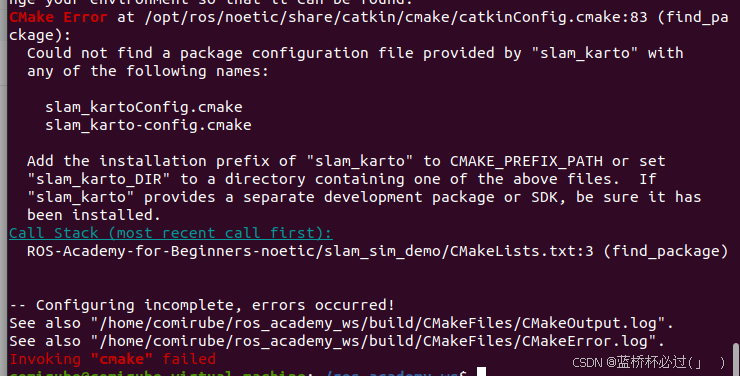
第二个报错slam_karto
sudo apt-get update
sudo apt-get install ros-noetic-slam-karto接下来需要修改
~/ttt_ws/src/ROS-Academy-for-Beginners-noetic/robot_sim_demo/scripts中的robot_keyboard_teleop.py
//将第一行#!/usr/bin/env python
#!/usr/bin/env python3接下来编译一下
cd ~/ttt_ws
catkin_make
source ~/ttt_ws/devel/setup.bash #刷新环境 方法一
rospack profile #刷新环境 方法二在主目录的.bashrc中加入ros环境变量
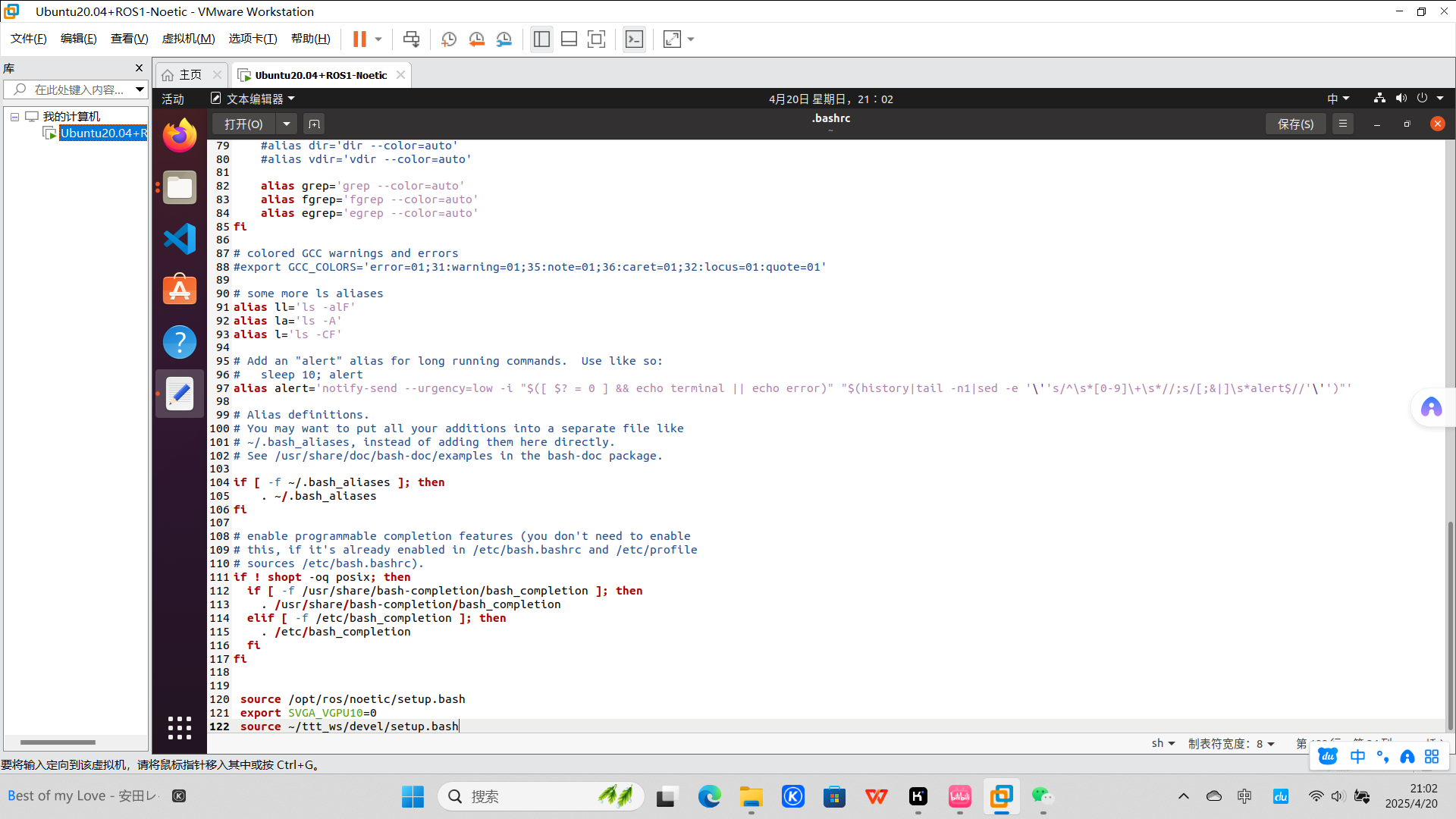
echo "source ~/ttt_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc运行基本示例
#第一个终端
rospack profile
roslaunch robot_sim_demo robot_spawn.launch
#新开一个终端控制运动
rosrun robot_sim_demo robot_keyboard_teleop.py

















 517
517

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









