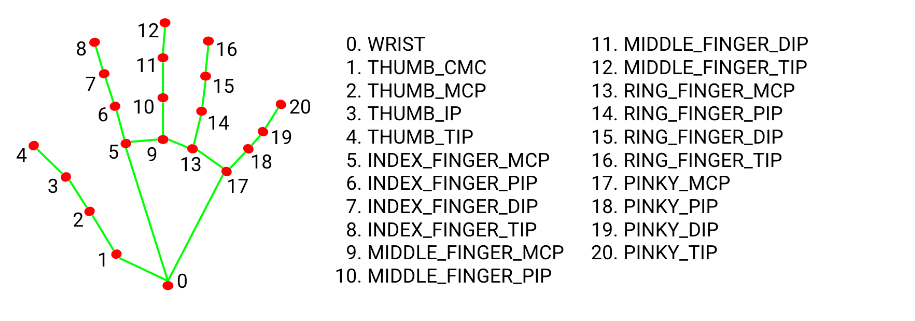
1、程序功能说明 功能开启后,摄像头捕获图像,识别相关手势来控制小车移动。 手势数字 “5” 小车停止 手势“yes” 小车走正方形 手势 “ok” 小车转圈 手势 “rock”(食指小拇指伸直,其他的弯曲) 小车走s型 手势鄙视(握紧拳头,伸出大拇指,大拇指朝下) 小车往前之后 这里当每个手势运动完后,会归回初始化位置,并且滴一声,等待下次的手势识别。 MediaPipe Hands从一帧中推断出21个手值关节的3D坐标。 2、程序启动 2.1、启动命令 打开一个终端输入以下指令进入docker, ./docker_ros2.sh 出现以下界面就是进入docker成功








 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






