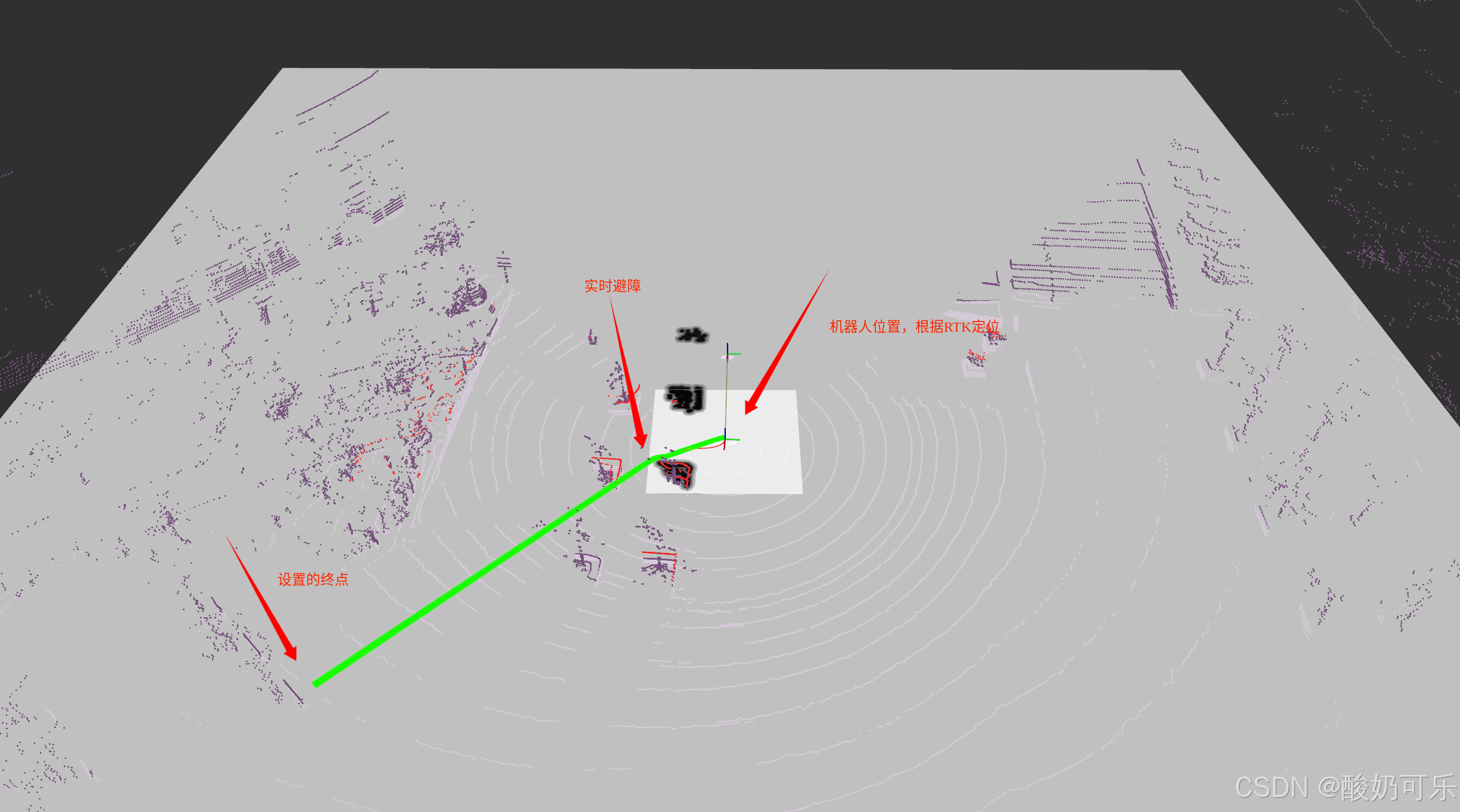
目录 1. 简介 2. 局部规划器安装 3. move_base配置 4. 启动 1. 简介 现在我们要将之前的数据接入到Move_base中,使得机器人能够根据Map上的终点进行导航,并且实现避障 效果如下图 2. 局部规划器安装 安装TEB局部路径规划器,注意我这里的ROS版本为noetic,可以根据自己修改sudo apt update sudo apt install ros-noetic-teb-local-planner 3. move_base配置 move_base的启动文件为,该文件名为n











 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 8299
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
8299
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








