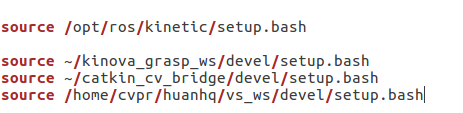
如何解决无法找到rosrun功能包的问题 今天rosrun突然找不到自己的功能包,但是功能包所在的工作空间已经写进bashrc(第二行),原来一直是没问题,没动过自己的工作空间,只是安装了一些东西. 下面是我的bashrc 解决方法:将工作空间的路径调到最后 再输入source ~/.bashrc即可 具体原因不太清楚,如果出现这个问题可以试试这种方法


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























 2965
2965





