






本文为毕业设计及论文的环境搭建及算法配置。
转载请注明出处。
1.1 搭建workspace
打开终端(ctrl+alt+T快捷键)
mkdir -p ~/study01/src #创建study01及下属src文件夹
cd ~/study01/ #进入study01工作空间
catkin_make #编译工作空间
关闭此终端,将小车模型与地图的功能包gazebo_pkg复制到src文件夹下
回到工作空间study01,在此workspace右键打开终端,编译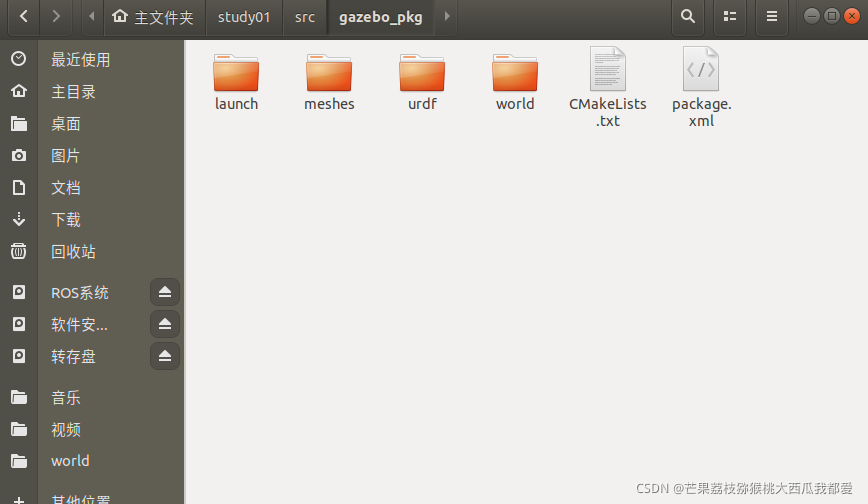
launch—存放小车与环境的启动文件
meshes–存放小车的渲染文件
urdf --存放小车的3D模型文件
world --存放环境地图模型
将该工作空间加入路径,减少以后输入命令的繁琐
进入主目录,ctrl+h打开隐藏文件夹,找到**.bashrc**文件
在该文件最下方加上
source ~/study01/devel/setup.bash
保存后退出。
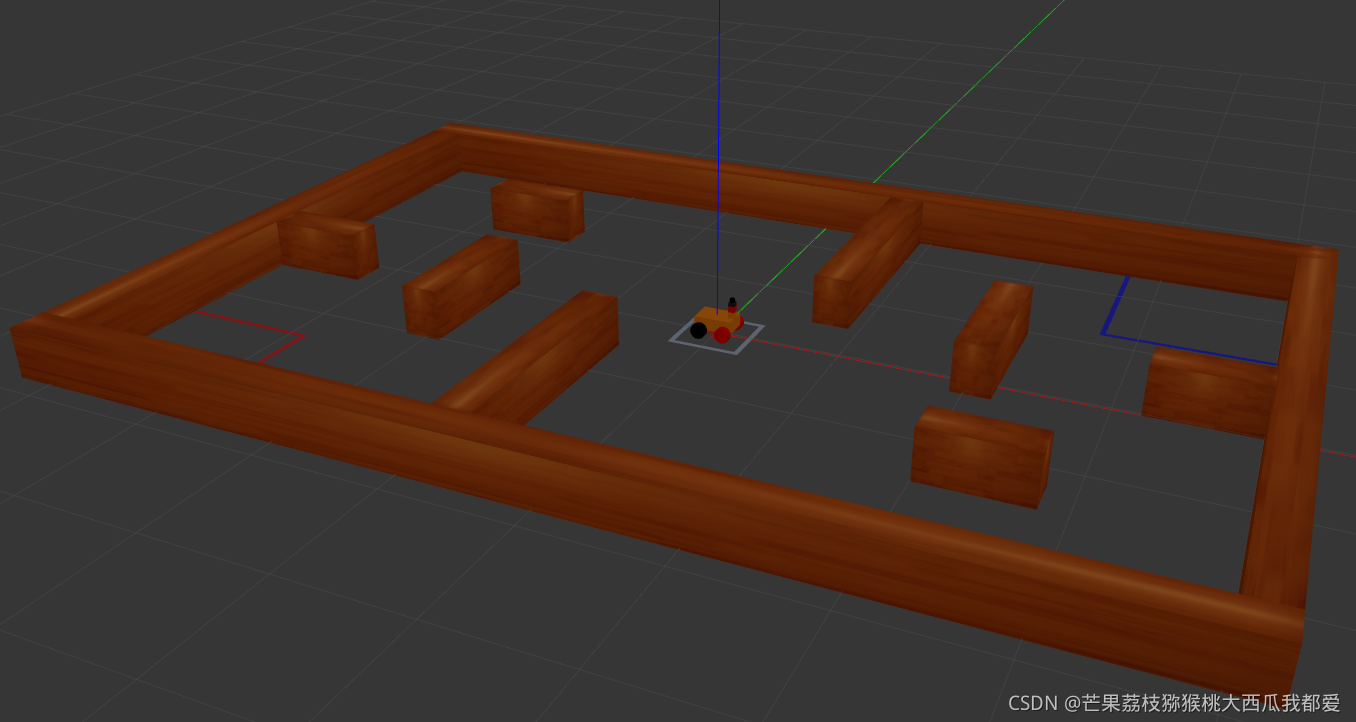
1.2 打开gazebo查看
进入工作空间study01,在此workspace右键打开终端
source devel/setup.bash #source能够使得系统找到文件,便于用tab补全命令
roslaunch gazebo_pkg icra.launch #启动icra文件,打开gazebo
1.3 小车运动控制
打开终端(crtl+T)安装小车运动控制软件包
sudo apt install ros-melodic-teleop-twist-keyboard ros-melodic-rqt-graph
安装完后关闭该终端
在正在运行gazebo的终端另开终端(ctrl+shift+T)
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
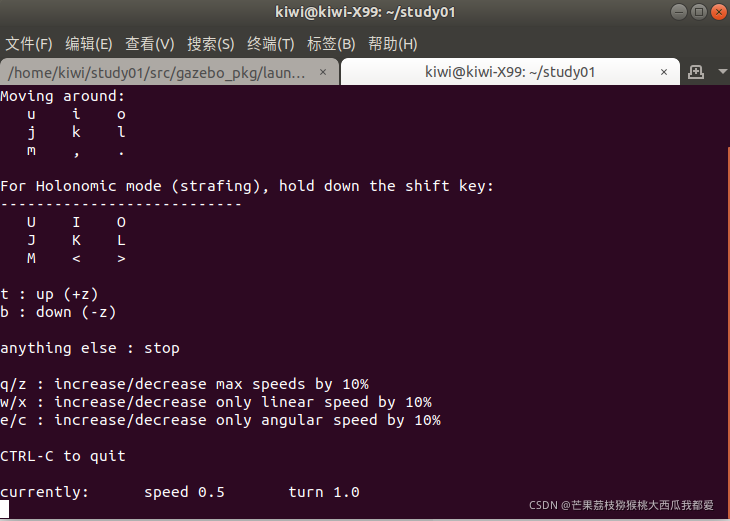
U–向左前方转向,I–前进,O–向右前方转向
J–原地左转,K–停止,L–原地右转
M–向左后方转向,<-倒车,>–向右后方转向
在终端页面对gazebo中的小车进行实时运动控制
ctrl+c可结束命令
exit退出终端

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









