




 本文记录了作者对VRep软件的探索过程,包括URDF机器人模型的导入、动力学模型配置、末端工具和力传感器的添加以及MATLAB与VRep的通讯。在配置动力学模型时,强调了质心设置的重要性以避免抖动问题。同时,介绍了如何通过平移和旋转调整坐标系以正确连接末端法兰盘,并展示了MATLAB与VRep交互的简单步骤。
本文记录了作者对VRep软件的探索过程,包括URDF机器人模型的导入、动力学模型配置、末端工具和力传感器的添加以及MATLAB与VRep的通讯。在配置动力学模型时,强调了质心设置的重要性以避免抖动问题。同时,介绍了如何通过平移和旋转调整坐标系以正确连接末端法兰盘,并展示了MATLAB与VRep交互的简单步骤。
这些天主要对vrep做了一些探索,一些笔记如下:
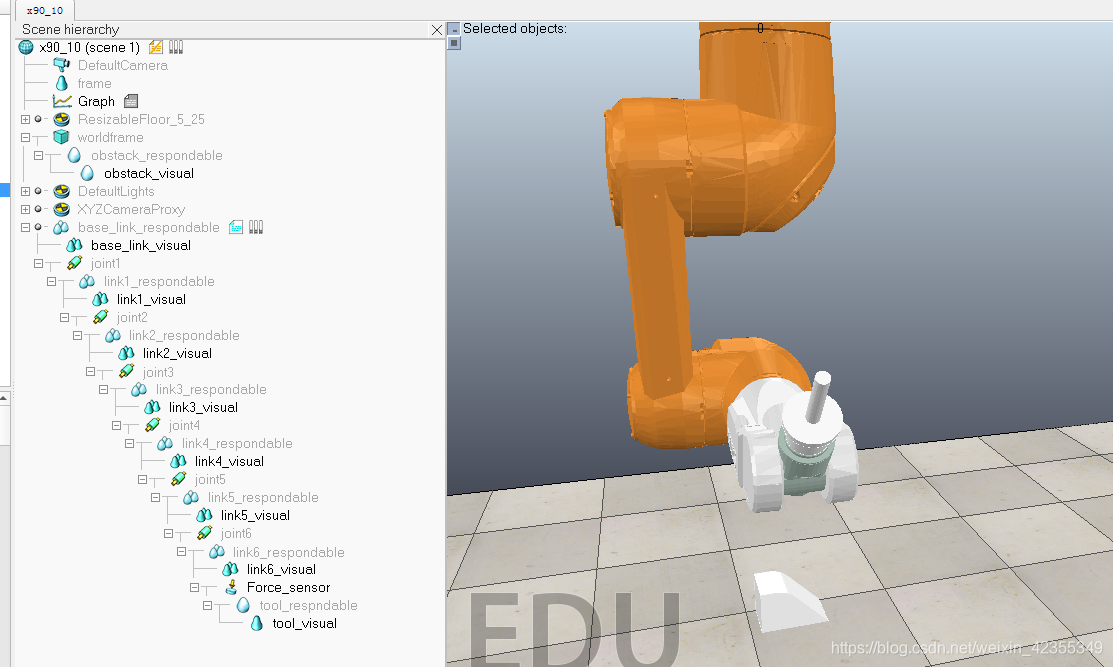
1.urdf机器人模型文件的导入 点击plugins-urdf importing即可
2.动力学模型的配置
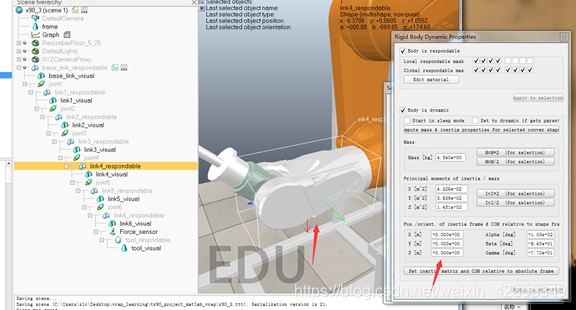
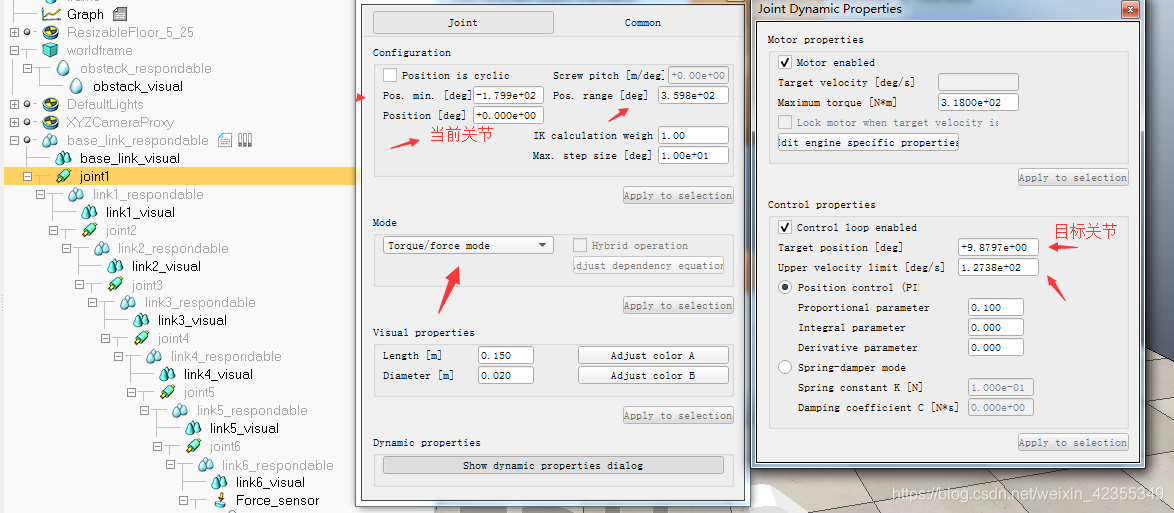
将此处改成零,大意是以方框的正中心为质心,否则很容易抖!!模型导入后坐标系都会被这个包围盒的坐标系覆盖,上面的bady is responsable表示刚体是有碰撞特性的,一般前一个臂如果前四个打钩,后一个臂则后四个打钩,bady is dynamic表示是该物体是动态的,即受到一定的力会动,各个关节轴配置如下,力矩控制模式,其中position是当前关节,改了机器人会动,target position是目标关节,如果一切都配置好了的话,点击仿真按钮机械臂会走到该关节位置(不会抖!)
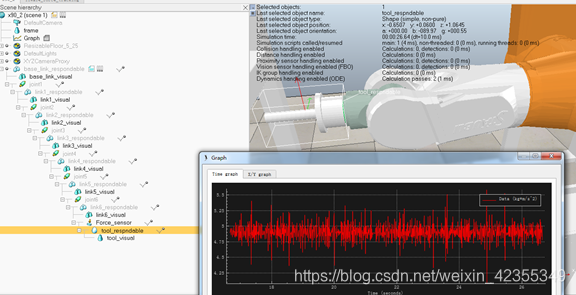
3. 末端工具和力传感器添加
这里就需要熟练使用这两个按钮了
因为导入后坐标系是包围盒中心,看包围盒的尺寸大小如下,通过平移旋转工具调到与末端法兰盘间是自由落体运动才行,最后再add-forcesensor,即可稳定连接(vr
vrep笔记
最新推荐文章于 2025-05-31 15:09:29 发布
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1634
1634

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









