







ROS中IMU数据表示
执行下列命令查看header:
rosmsg show sensor_msgs/Imu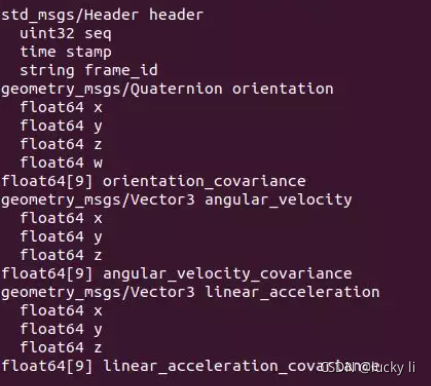
linear_acceleration表示线加速度;linear_acceleration_covariance表示线加速度协方差;
angular_velocity表示角速度;angular_velocity_covariance角速度协方差;
orientation表示姿态,使用四元数表示;orientation_covariance表示姿态协方差;
orientation是由 linear_acceleration和 angular_velocity计算而得,但并不是所有IMU设备都直接提供 orientation;
如果没有提供,将 orientation各项置为0, orientation_covariance各项置为-1;
这里协方差表示各个数据的误差,一般由器件厂商给出。

















 1734
1734

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









