






滑模控制
滑模控制(变结构控制)起源于继电器控制和 Bang-Bang 控制,它与常规控制的区别在于控制的不连续性。滑模控制是变结构控制的一 个分支。它是一种非线性控制,通过切换函数来实现,根据系统状态偏离滑模的程度来切换控制器的结构(控制律或控制器参数),从而使系统按照滑模规定的规律运行的控制方法。
控制性能:滑模控制对非线性系统特别是离散系统有良好的控制性能,
可应用性:对多输入多输出系统可应用性极强。
鲁棒性:当系统处于滑动模型,对被控对象的模型误差、对象参数的变化以及外部干扰有极佳的不敏感性。
抖振:当状态轨迹到达滑动模态面后,难以严格沿着滑动模态面向平衡点滑动,而是在其两侧来回穿越地趋近平衡点,从而产生抖振
滑模控制的原理
设存在一个系统
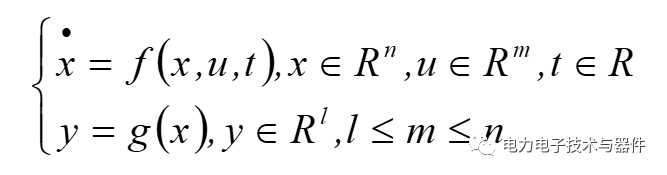
其中,x,u,y 分别表示系统的状态变量、输入变量、输出变量, n,m,l 分别表示系统的状态变量、输入变量、输出变量的维数, R 表示实数域。
首先需要确定切换函数向量:

具有的维数一般情况下等于控制的维数。
并且寻求变结构控制:
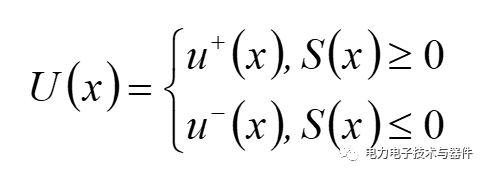
这里的变结构体现在当u+(x)≠u-(x),使得以下三个条件成立:
(1)滑动模态存在,即满足:
(2)到达条件,切换面Si(x)=0以外的相轨迹将于有限时间内到达切换面
(3)切换面是滑动模态区,且滑模运动渐近稳定,动态品质良好
满足以上三个条件便可以做滑模变结构控制。
04
滑模控制设计步骤
设计滑模变结构控制器的基本步骤包含两个相对独立的部分
(1)选取设计切换函数S(x),使之所确定的滑动模态渐进稳定(参照李雅普诺夫稳定性)且具有良好的动态品质
a.线性系统:一般设

b.非线性系统一般可使用三种方法,分别是终端滑模,积分滑模以及分段线性滑模
(2)求取控制律u=u±(x),从而使到达条件满足时,在切换面上形成滑动模态区。
方法1:采取滑动模态存在条件
求得控制律的一个不等式,需要在满足此不等式的条件下选择合适的控制律。
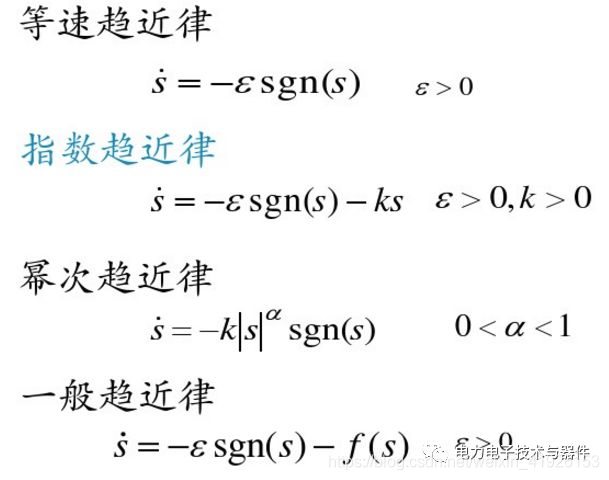
方法2:采用趋近律方法,可直接求取等式型控制律
以下为几种常见的趋近律

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









