







 本文介绍了频域分析法在控制理论中的应用,重点讲解了二阶震荡环节、惯性环节的幅相特性,以及奈奎斯特稳定判据的原理和MATLAB中的实现。通过柯西幅角原理,探讨了如何通过Nyquist曲线判断线性控制系统的稳定性。
本文介绍了频域分析法在控制理论中的应用,重点讲解了二阶震荡环节、惯性环节的幅相特性,以及奈奎斯特稳定判据的原理和MATLAB中的实现。通过柯西幅角原理,探讨了如何通过Nyquist曲线判断线性控制系统的稳定性。
目录
频域分析法
典型输入信号:正弦信号
研究的是稳态情况下,正弦响应的幅值和相角随频率的变化规律,不考虑暂态响应。
由开环频率特性研究闭环稳定性及性能。(避免求解闭环特征方程的根)幅相频率特性(Nyquist)
典型环节的幅相频率特性曲线
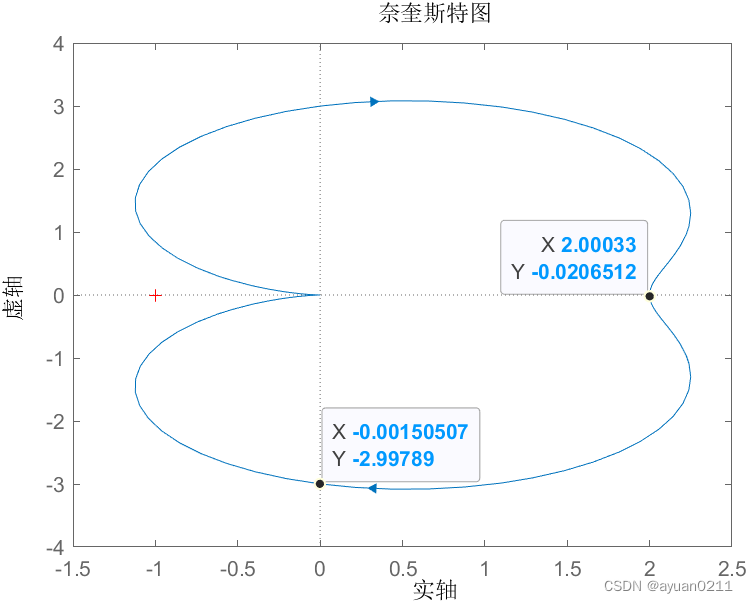
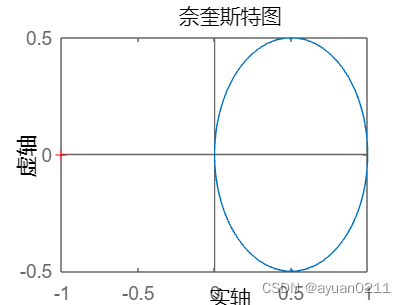
假设传递函数为,则可利用matlab进行Nyquist曲线绘制,代码如下:
num = [4];
den = [1 2 4];
sys = tf(num,den)
nyquist(sys)
1.二阶震荡环节( )
)
幅频特性: 相频特性:
谐振频率: 谐振峰值:
2.惯性环节
幅频特性:,相频特性:
注:根据不同的传递函数,可以直接使用matlab进行Nyquist曲线绘制。
奈奎斯特稳定判据
用于分析单变量系统的稳定性。
稳定判据:P-Z=N;P:s右半平面开环传递函数极点个数,Z:s右半平面闭环传递函数极点个数,N:Nyquist曲线绕(-1,j0)点的圈数。
1.柯西幅角原理:
奈奎斯特稳定判据的理论基础。
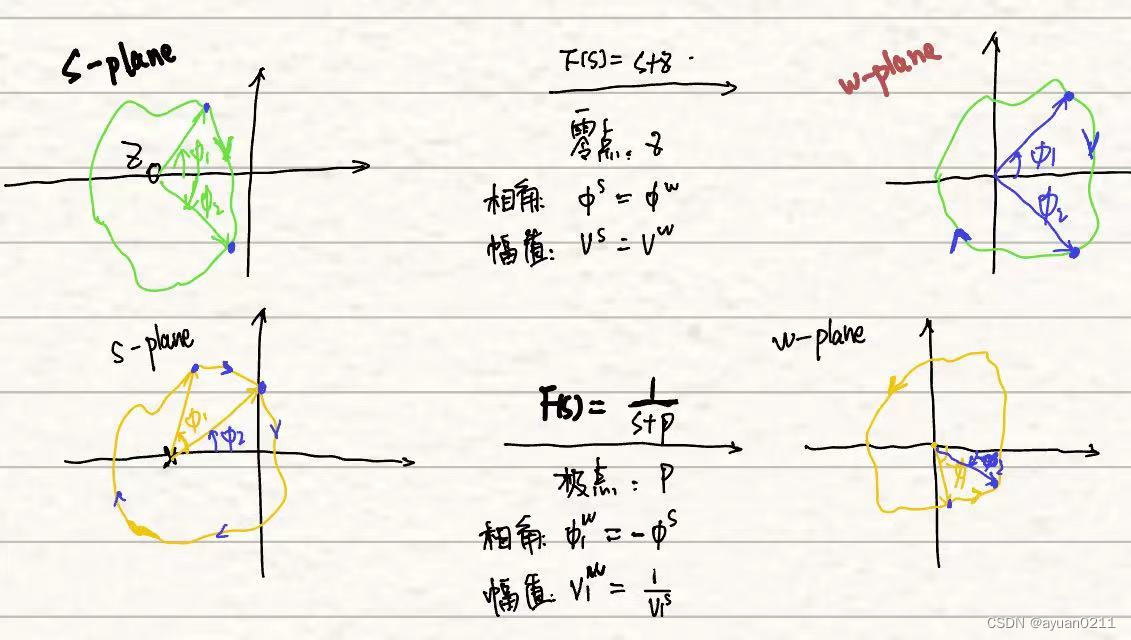
如图所示:
在复平面s内,顺时针画一条闭合曲线A,B曲线是A通过F(s)后,在w平面上的映射。
A曲线每包含F(s)的零点,B曲线就绕(0,0)点顺时针一圈;
A曲线每包含F(s)的极点,B曲线就绕(0,0)点逆时针一圈。
B曲线逆时针绕(0,0)点的圈数 = 极点和零点的个数差。
2.线性控制系统
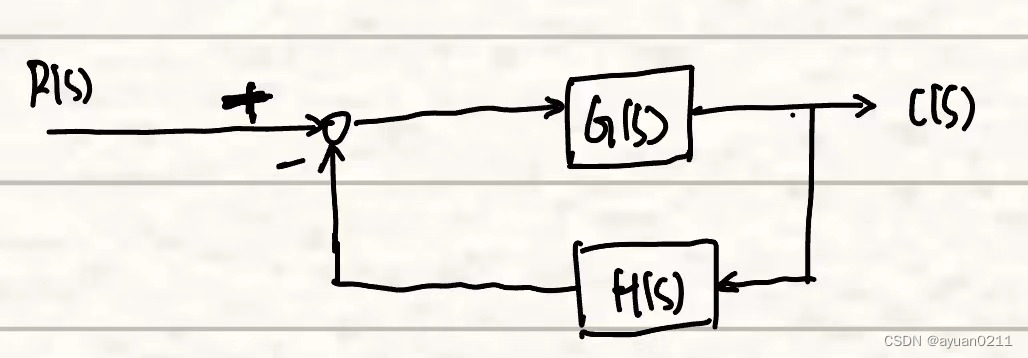
系统开环传递函数为GH:其中G可以表示为: ,H可以表示为:
,则:
;
系统闭环传递函数为;
构造映射函数为:;
由上式可得到结论:系统开环传递函数的极点与映射函数F(s)的极点相同,系统闭环传递函数的极点与映射函数F(s)的零点相同。
对于线性控制系统来说,曲线A为复平面s的右半平面,即Nyquist Contour。
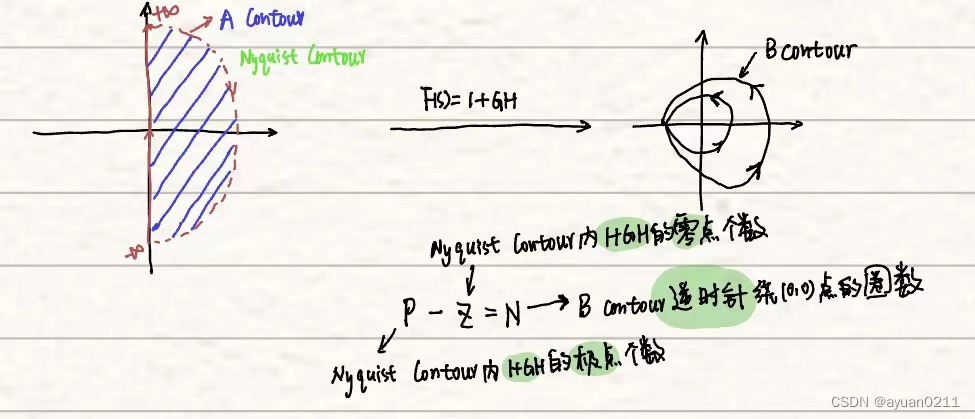
结合上面结论:P就是开环传递函数的极点,Z就是闭环传递函数的极点。
由于是线性系统,F(s)=1+GH,即向左平移一个单位,由此,将F(s)转换为GH,即为线性系统GH的Nyquist曲线。
那么:N则变换为B Contour逆时针绕(-1,j0)点的圈数。
由此可推导出:Nyquist稳定判据:P-Z=N;
P:s右半平面开环传递函数极点个数,
Z:s右半平面闭环传递函数极点个数,
N:Nyquist曲线绕(-1,j0)点的圈数。
由于系统稳定,则闭环传递函数在s右半平面的极点个数为0,即Z=0,则P=N。
判断控制系统稳定的具体步骤
step1:根据给出的开环传递函数得到P。
step2:通过MATLAB绘制Nyquist曲线,查看Nyquist曲线包含(-1,j0)点的圈数N,看包围的圈数,根据Nyquist曲线的方向从实轴交点开始算起即可。
例:

step3:逆时针,N为正,上图即为N=2;顺时针即为负。
step4:判断是否满足等式P-Z=N,若满足则系统稳定,若不满足则系统不稳定。
参考:
https://www.bilibili.com/video/BV1F34y1h7so?p=41&vd_source=ed5408ad8775097c07913f4b4155ca01
【自动控制原理】13_奈奎斯特稳定性判据_Nyquist Stability Criterion_Part 1_哔哩哔哩_bilibili


















 411
411

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











