






 本文详细介绍使用MoveIt配置机械臂的过程,包括模型下载、初始化、碰撞检测、虚拟关节设置等关键步骤,并提供了完整的配置流程及注意事项。
本文详细介绍使用MoveIt配置机械臂的过程,包括模型下载、初始化、碰撞检测、虚拟关节设置等关键步骤,并提供了完整的配置流程及注意事项。
一、准备模型
下载地址:https://download.youkuaiyun.com/download/weixin_37663721/36066113
二、初始化机械臂
0.启动moveit初始化助手
roslaunch moveit_setup_assistant setup_assistant.launch
1.加载模型
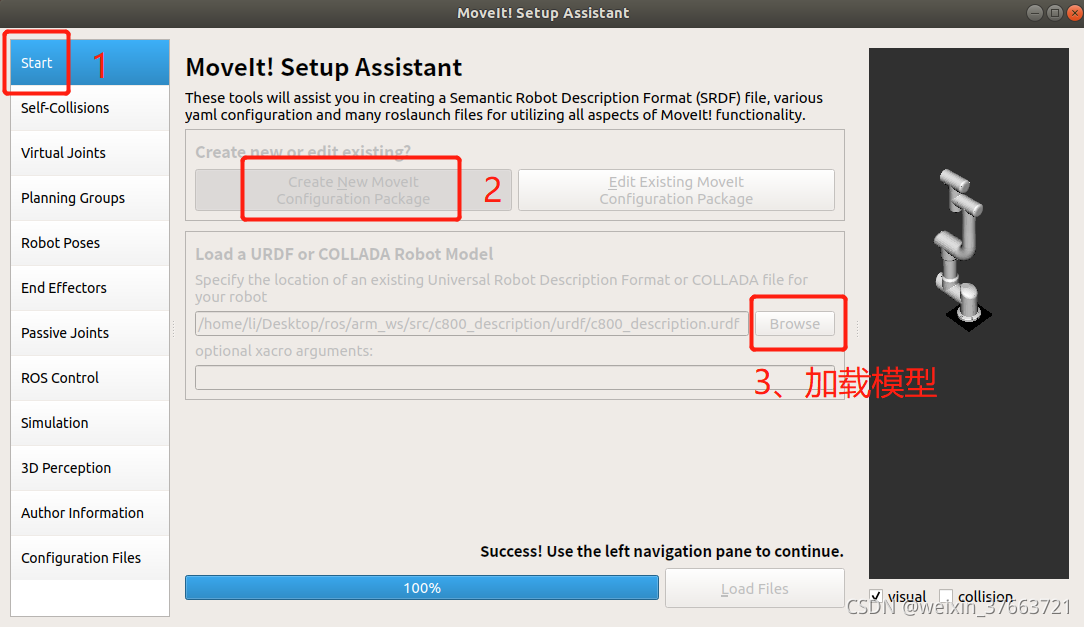
注意:模型加载不出来的原因
1、没有启动roscore
2、没有source setup.bash
3、urdf没在工作目录下
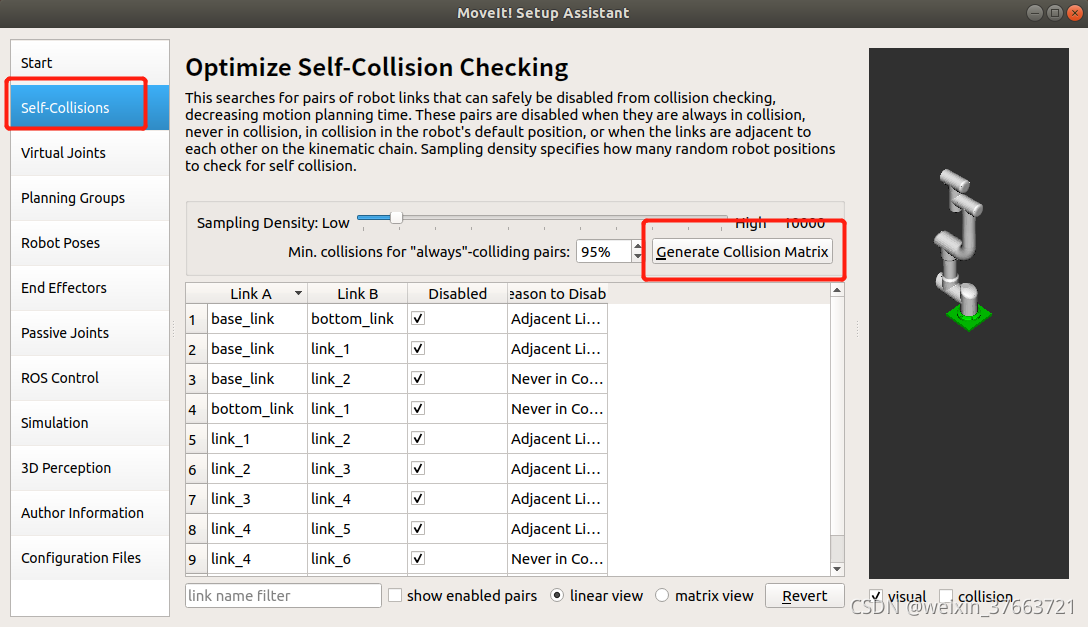
2.自碰撞检测
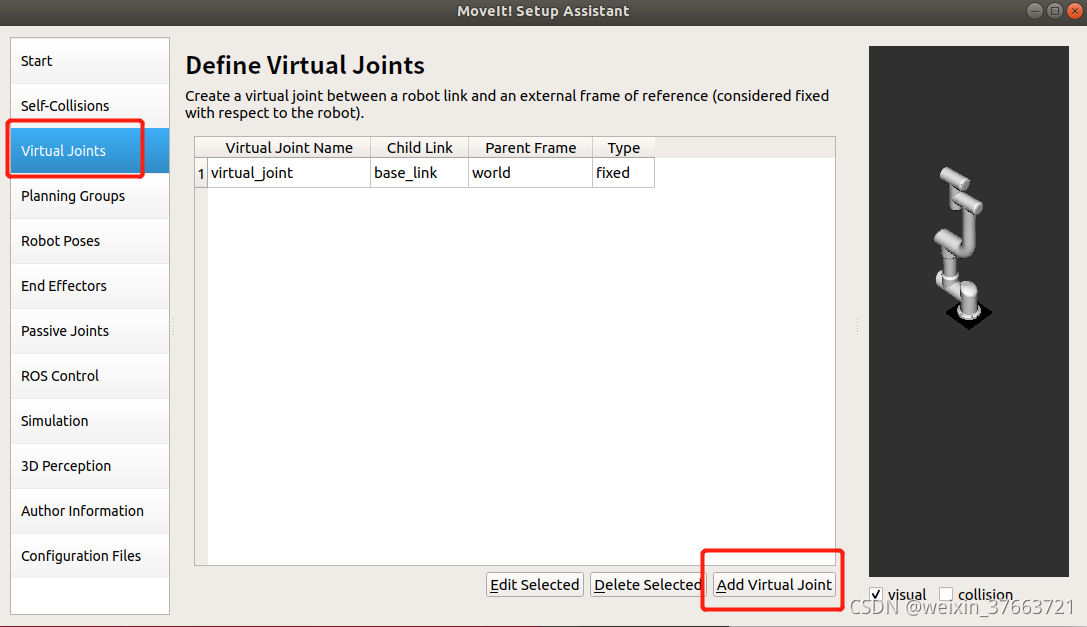
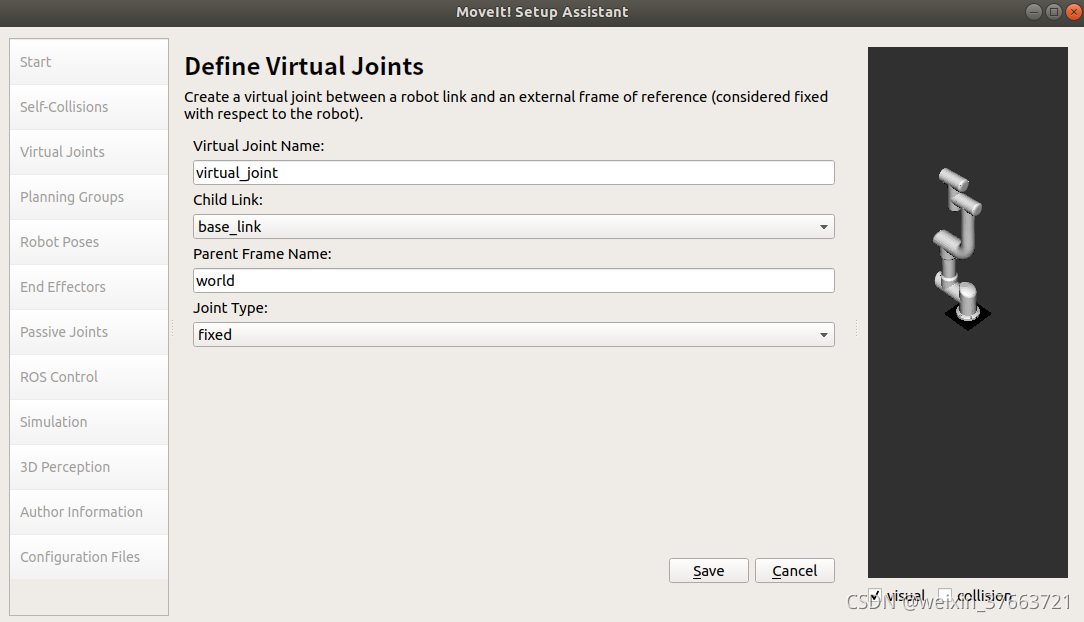
3.虚拟关节
用于连接机械臂和World,关节可以是固定的,也可以是移动的
4.添加运动规划组
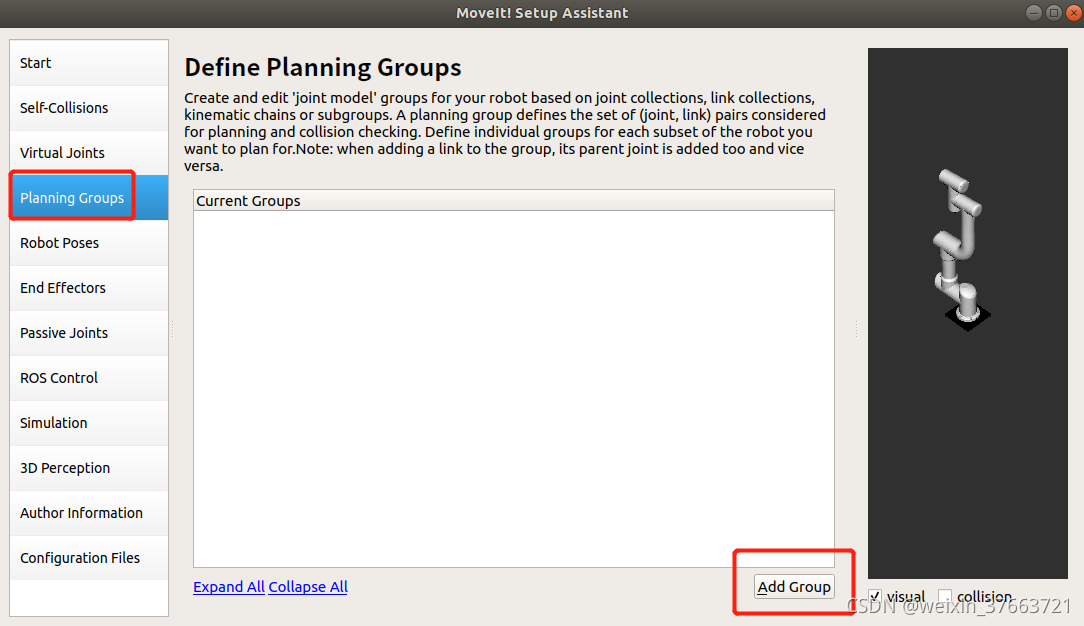
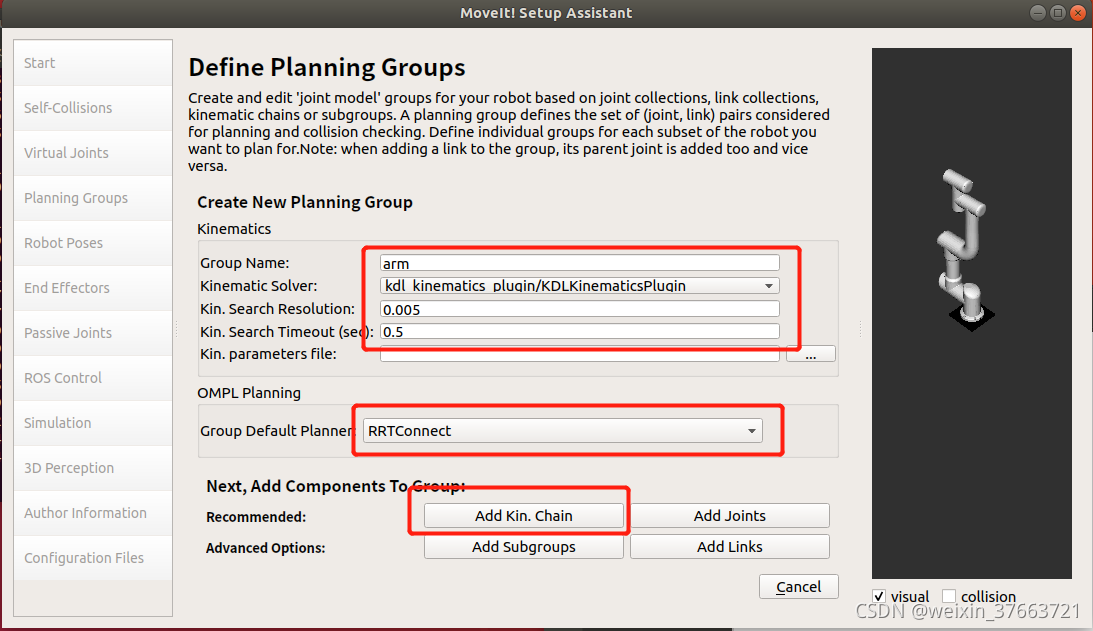
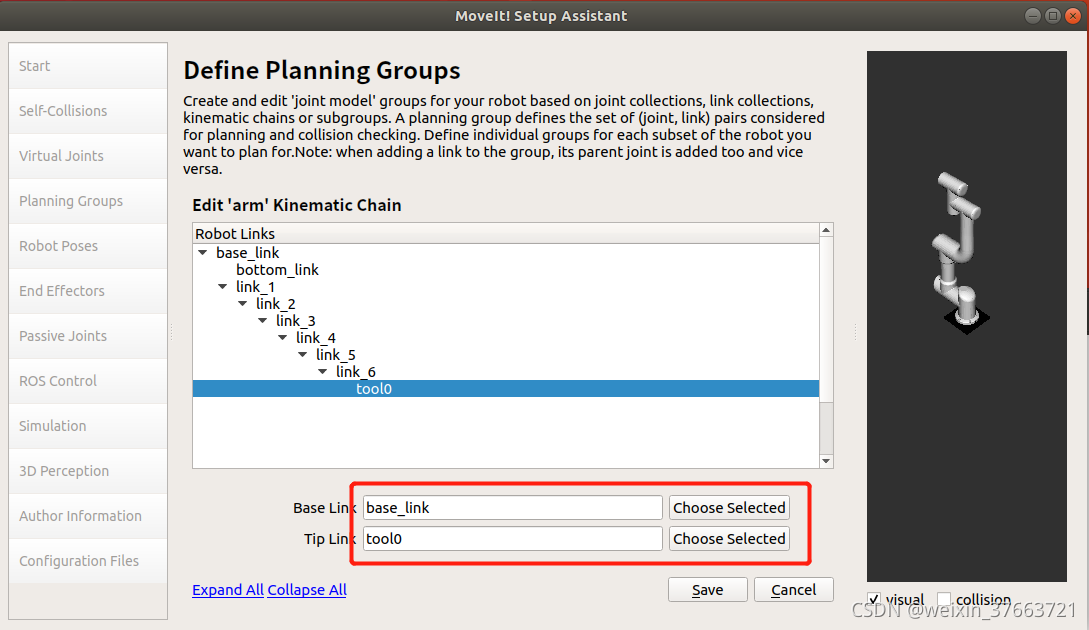
注意:
1、timeouts设置要大一点,不然计算机计算不过来就会报错
2、可以添加多个chain
5.设置机械臂位姿
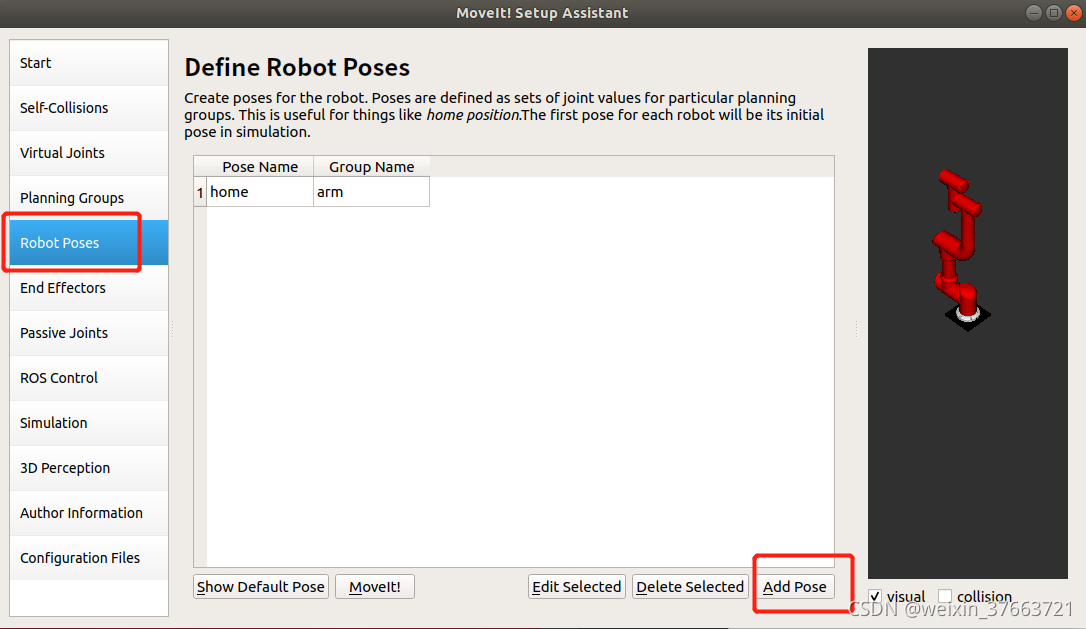
注意:
1、自己根据需求定义即可
2、后续也可以更改
6、设置末端执行机构
因为这个机械臂没有末端执行机构,因此跳过
7、消极关节设置
消极关节也就是不用运动的关节,这个机械臂的关节都要运动,因此不用设置。
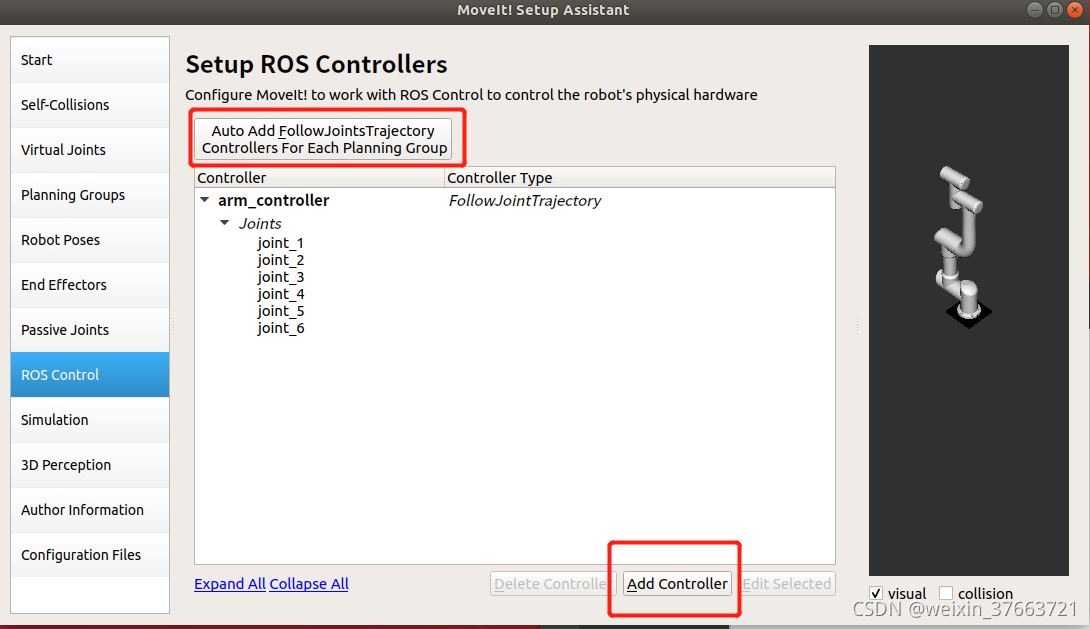
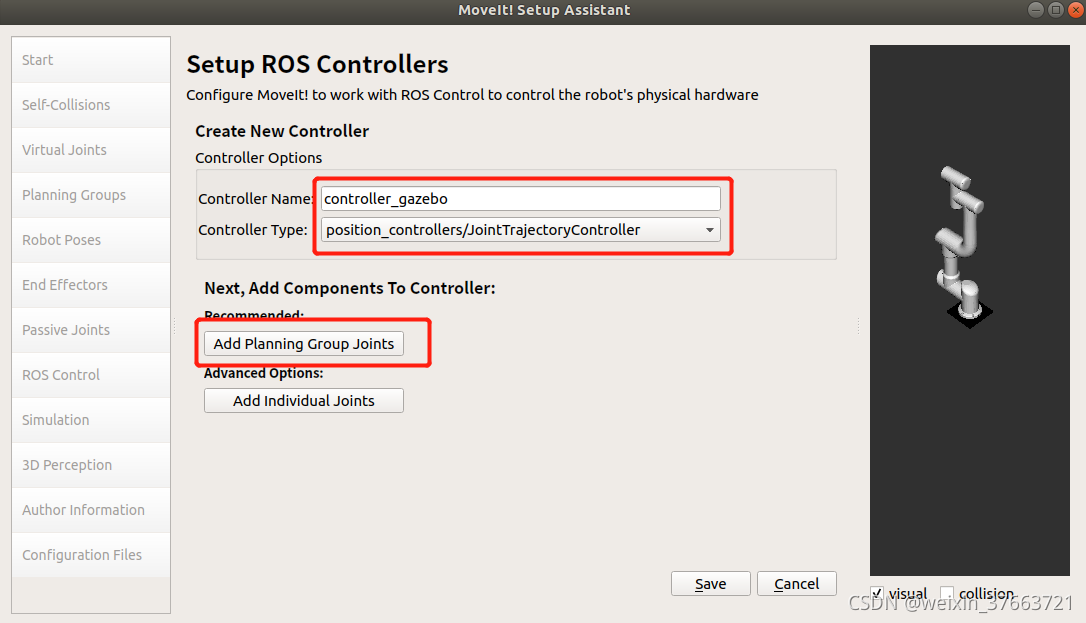
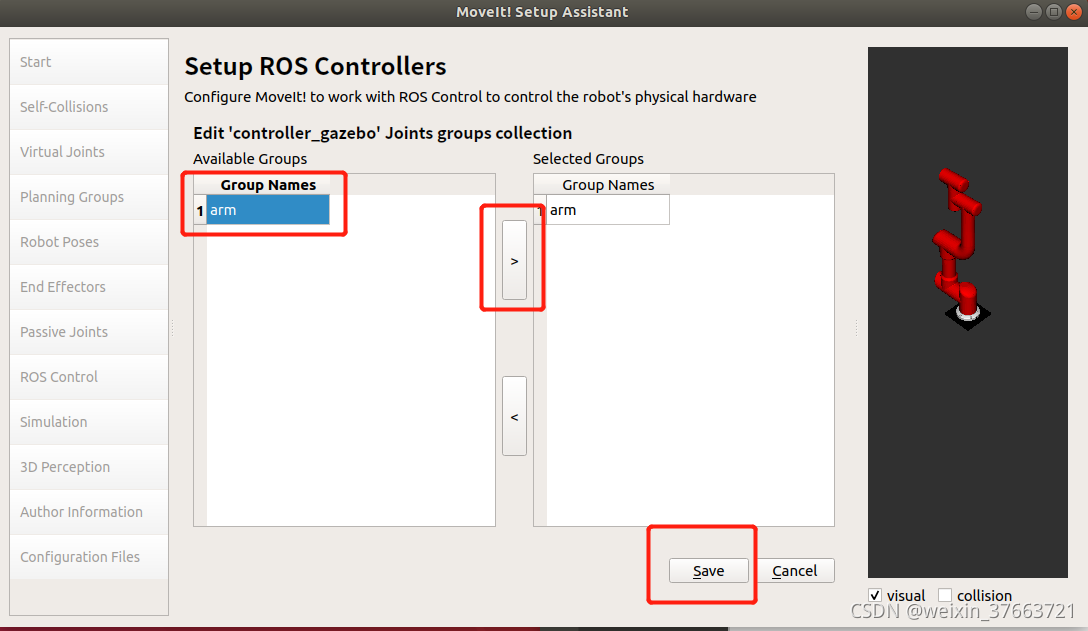
8、设置控制器
9.仿真设置(可跳过)
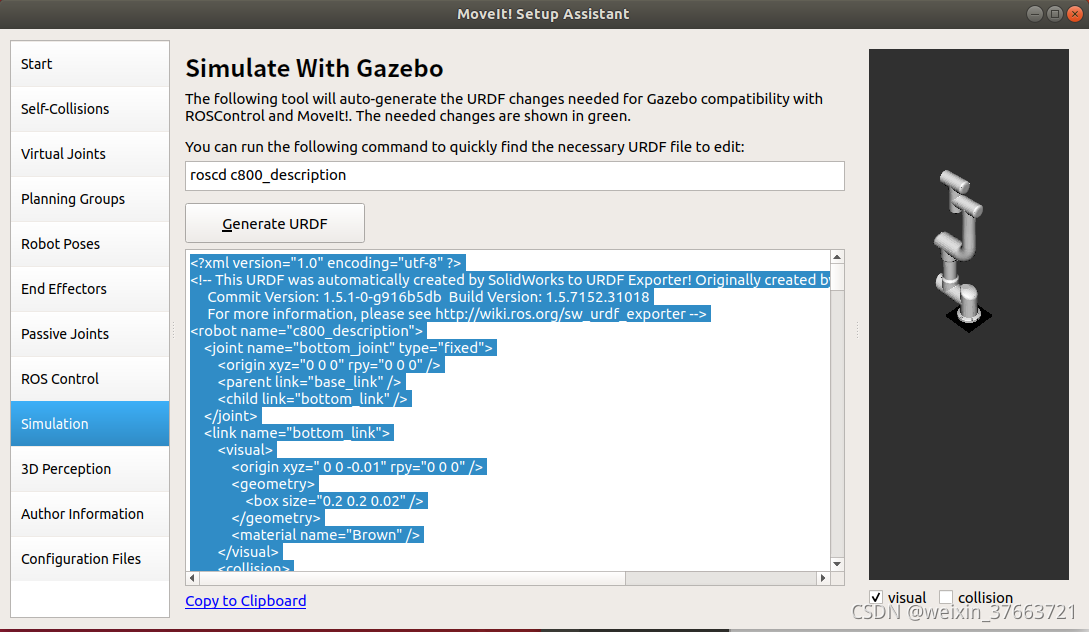
把生成的UDRF模型替换旧的UDRF模型(导进来的那个),因为这里moveit做了优化,更加方便于后续仿真,但是需要做更改,需要把文件里面的所有EffortJointInterface改成PositionJointInterface(力控制改成位置控制)
10、3D传感器设置
这个模型没有深度摄像机等传感器,因此跳过
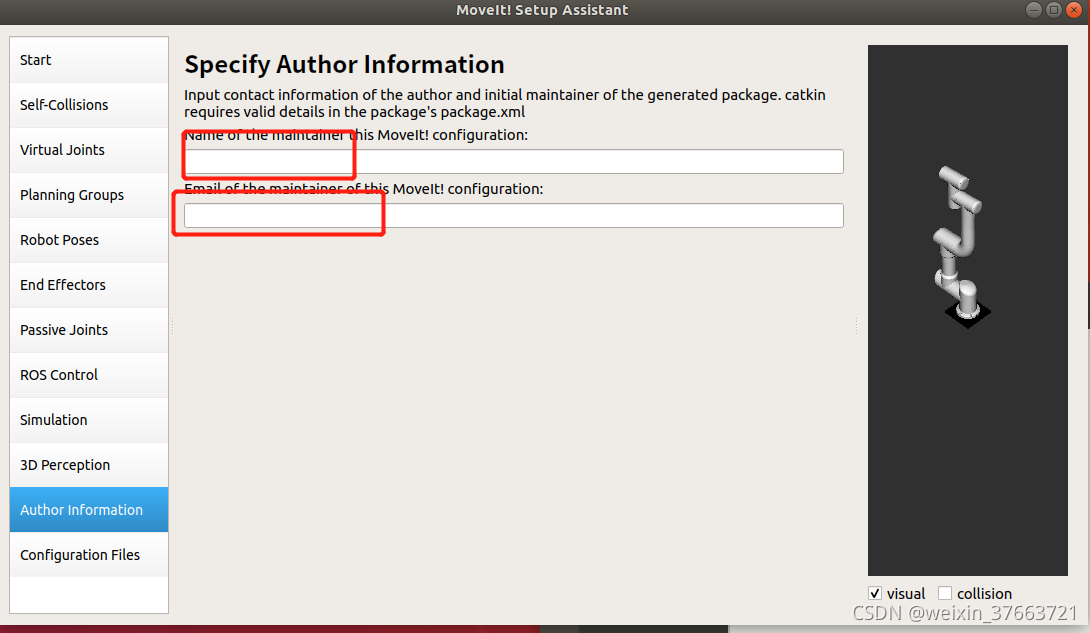
11、填写姓名和邮箱
这个步骤不要跳过
12.生成模型
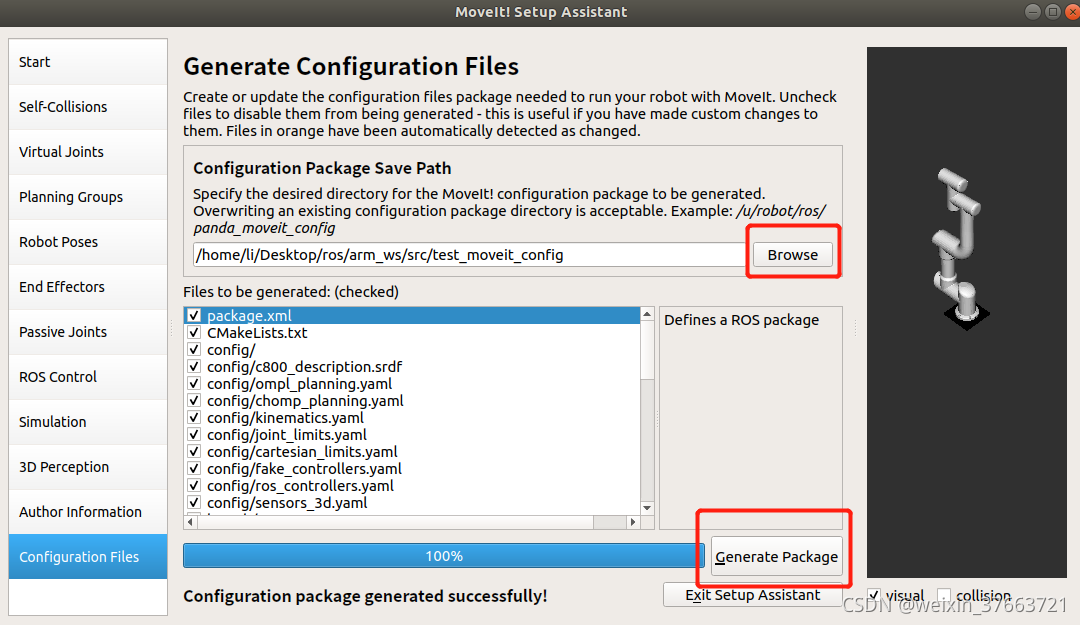
在工作区间下的src文件夹下创建个新文件夹存储即可。
到此配置完成
13.编译启动demo.launch
catkin_make
source devel/setup.bash
roslaunch test_moveit_config demo.launch
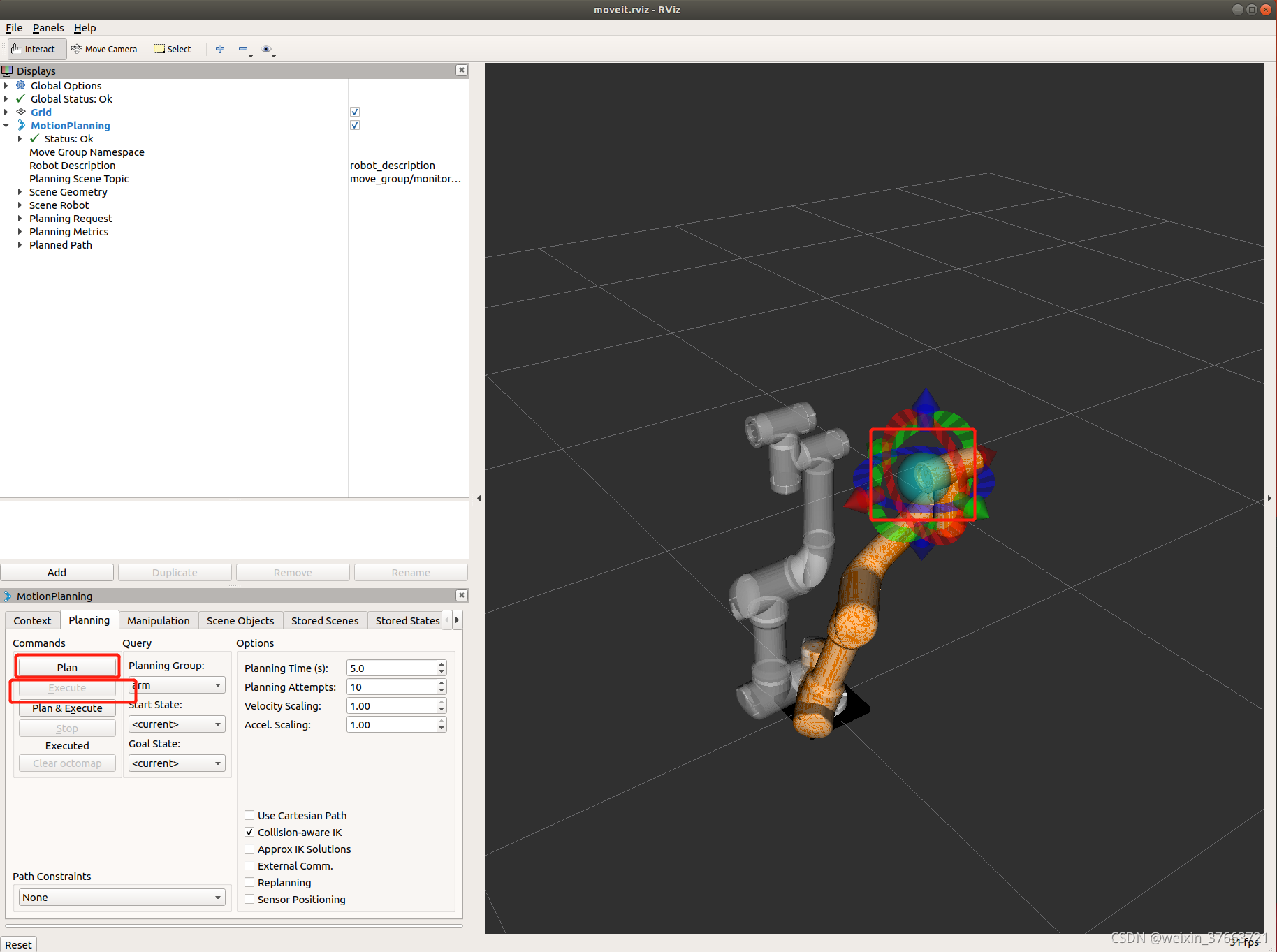 鼠标拖动小球,再点击plan规划路径,接着点击执行。
鼠标拖动小球,再点击plan规划路径,接着点击执行。

















 2364
2364

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









