




1. 引言
直流无刷电机(BLDC)因其高功率密度、高效率等优点,在工业控制领域获得了广泛应用。其控制性能很大程度上取决于转速环的控制效果。本文将基于BLDC的dq模型,深入探讨采用对称最优法设计转速环PI参数的原理与实现方法。
我们将从BLDC的数学模型出发,分析转速环的控制结构,重点阐述对称最优法的理论基础、设计步骤和参数整定方法,并针对采样频率25kHz、电流环简化为一阶惯性环节的实际条件,提供详细的设计实例。
2. BLDC的dq模型与转速环结构
2.1 dq坐标系下的BLDC数学模型
在dq同步旋转坐标系下,BLDC的电压方程可表示为:
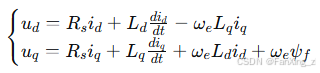
其中,、
为d、q轴电压,
、
为d、q轴电流,
、
为d、q轴电感,
为定子电阻,
为永磁体磁链,
为电角速度。
电磁转矩方程为:
![]()
对于面装式永磁同步电机(SPMSM),,转矩方程简化为:
![]()
其中,为转矩常数,
为极对数。
2.2 转速环控制结构
转速环通常作为外环,其输出作为q轴电流的给定值,控制框图如下:
转速给定ω* → 转速控制器 → iq* → 电流环 → 电机 → 实际转速ω
↑ |
+------------------------+
转速控制器的设计目标是使实际转速快速、准确地跟踪给定值
,同时保证系统的稳定性和鲁棒性。
3. 对称最优法理论基础
3.1 对称最优法的基本思想
对称最优法(Symmetrical Opt
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 5048
5048

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











