






在工业自动化、精密制造、电力电子变换以及伺服系统等领域,周期性扰动无处不在:电机旋转产生的不平衡力、电网电压的周期性谐波、磁盘驱动器的轨迹跟踪、机器人关节周期性运动等。
传统的PID控制器在面对这类扰动时往往力不从心,稳态误差难以消除。重复控制算法正是为解决这类周期性控制问题而生,它能实现零稳态误差跟踪/抑制特定基频及其所有整数倍谐波的卓越性能。
本文将深入剖析重复控制的核心原理、关键设计要素、稳定性考量、典型应用场景及前沿改进方向,助你全面掌握这一强大工具。
一、问题背景:周期性扰动的困扰
考虑一个典型的反馈控制系统,其输出需跟踪周期性参考信号 r(t)(如正弦波、方波)或抑制周期性扰动 d(t)(如机械振动、电网谐波)。设其基波周期为 T,基波角频率为 ω0 = 2π/T。
-
传统控制器的局限: PID 等线性控制器在特定频率点增益有限,难以完全消除所有谐波频率 (
ω0, 2ω0, 3ω0, ...) 的跟踪误差或扰动影响,导致稳态误差残留。 -
重复控制的核心目标: 设计一个控制器
C_rep(z),使得闭环系统对频率为kω0 (k=1,2,3,...)的所有周期性信号具有无穷大的开环增益,从而在稳态时实现对这些频率成分的零误差跟踪或抑制。
二、核心原理:内模原理与周期延拓
重复控制的理论基石是著名的内模原理 (Internal Model Principle, IMP)。IMP指出:要使闭环系统能无稳态误差地跟踪或抑制一类外部信号,控制器中必须包含能生成该信号动力学模型的内部结构。
对于周期为 T 的任意信号 s(t),满足 s(t) = s(t - T)。在连续域,一个纯时延环节 e^{-sT} 的单位反馈闭环 1/(1 - e^{-sT}) 的极点在 s = jkω0 (k=0,±1,±2,...),恰好能产生所有频率为 kω0 的振荡模式。因此,这个环节或其离散化形式,就是重复控制器需要包含的“内模”。
在离散域(更常用),重复控制器的核心是一个正反馈回路,其中包含一个周期延时环节 z^{-N}。这里 N = T / Ts (Ts 为采样时间),即一个基波周期 T 内包含的采样点数。该结构被称为重复控制器内模 (Repetitive Internal Model)。
传递函数推导:
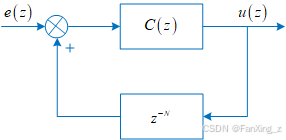
内模部分的输入为 e(z),输出为 u(z)。由图可得:
u(z) = e(z) + z^{-N} * u(z)
整理得内模传递函数:
G(z) = u(z) / e(z) = 1 / (1 - z^{-N})
频率响应分析:
-
当
z^{-N} = 1,即z = e^{jωTs}满足e^{jωNTs} = e^{jωT} = 1时,G_{im}(e^{jωTs})分母为零 → 增益无穷大。 -
条件
e^{jωT} = 1意味着ωT = 2πk→ω = k * (2π/T) = kω0 (k=0,1,2,...)。 -
结论: 内模
1/(1 - z^{-N})在频率点kω0 (k=0,1,2,...)处具有无穷大增益,这正是实现零稳态误差的关键。
三、完整结构:核心内模与补偿器设计
仅靠内模 1/(1 - z^{-N}) 无法构成实用的控制器。将其直接置于前向通路会导致:
-
稳定性问题: 无穷大增益点使系统在
kω0处开环增益无穷大,相位裕度无法定义,闭环极易不稳定。 -
零频 (k=0) 问题:
k=0即直流分量,无穷增益可能导致系统对直流扰动过于敏感或积分饱和。 -
非周期性信号响应差: 对非周期信号或瞬态响应缺乏有效控制。
因此,实用的重复控制器 C_rep(z) 采用以下结构:
-
: 重复控制增益。调节整体作用强度,
-
: 相位超前环节。用于补偿被控对象
P(z)和补偿器C(z)引入的相位滞后 (d为超前步数),确保在目标频率 (kω0) 附近满足稳定性条件。 -
Q(z): 低通滤波器或常数 (|Q(e^{jω})| <= 1)。核心作用:-
稳定性增强: 衰减高频增益,避免在
kω0 (k→∞)处增益仍为无穷大。常用Q(z) = α (0.95<α<1)或一阶低通Q(z) = (α)/(1 - (1-α)z^{-1})。 -
抑制零频 (DC) 增益:
Q(1) < 1使 DC 增益有限 (C_rep(1) = k_r z^{-d} Q(1) C(1) / (1 - Q(1))),避免直流问题。 -
鲁棒性提升: 降低模型失配对稳定性的敏感度。
-
-
C(z): 补偿器 (Compensator)。核心任务是相位补偿和增益整形:-
相位补偿: 设计目标通常是使
C(z)P(z)在目标频率带 (kω0附近) 的总相位滞后尽可能小,理想情况接近0°(或-180°的整数倍,需结合内模相位分析)。常用方法:-
逆模型:
C(z) ≈ P^{-1}(z)。若P(z)是最小相位且已知,效果最佳。 -
超前校正: 如
C(z) = k_c (z - a)/(z - b), |a|>|b|。 -
陷波/带通滤波器: 针对特定谐波进行增强补偿。
-
-
增益整形: 在目标频带提供足够增益,同时避免在其他频带(尤其高频)增益过大导致不稳定。常结合
Q(z)设计。
-
四、稳定性分析:小增益定理与奈奎斯特判据
重复控制系统的稳定性分析比普通线性系统更复杂,因为其内模引入了无穷多个极点 (1 - Q(z)z^{-N} = 0 的解)。常用方法:
-
基于小增益定理的充分条件:
-
首先假设内模稳定 (即
|Q(e^{jω})| < 1对所有ω成立,或Q(z)稳定且严格真)。 -
分析等效的“修正系统”
,其中
是保证系统基本稳定的基础控制器(如PID)。
-
小增益定理给出充分条件:如果
|| Q(z) (1 - T_m(z)) ||_∞ < 1,则闭环系统稳定。这转化为要求|Q(e^{jω})| * |1 - T_m(e^{jω})| < 1对所有ω成立。 -
物理意义:
T_m(z)反映了在目标频率点内模被“激活”前,基础闭环的误差传递特性。|1 - T_m|小意味着基础闭环在该点跟踪性能好,重复控制所需补偿量小,更容易稳定。Q(z)进一步抑制高频段风险。
-
-
奈奎斯特判据结合连续分数法:
-
将
1 - Q(z)z^{-N}视为一个在z平面单位圆上有N个极点的系统。 -
通过分析开环传递函数
L(z) = C_rep(z)P(z)的奈奎斯特图,观察其是否包围(-1, j0)点。需要特别注意在频率ω = kω0附近,由于Q(e^{jω})e^{-jωN} ≈ 1,L(e^{jω})的模很大,相位必须避开-180°。 -
相位超前
z^{-d}和C(z)的设计就是为了在kω0附近将L(e^{jω})的相位拉离-180°,避免奈奎斯特图在该点附近穿过(-1, j0)。
-
关键设计准则总结:
-
相位裕度: 在主要关心的
kω0频率点 (k=1,2,...,M),确保开环L(e^{jω_k})的相位满足∠L(e^{jω_k}) > -180°(或根据内模相位特性调整),并留有足够裕度 (> 30°-45°)。 -
增益裕度: 在相位接近
-180°的频率点,增益应远小于1。 -
k_r选择: 较小的k_r提高稳定性但降低收敛速度;较大的k_r加速收敛但增加失稳风险。需折中。 -
Q(z)设计:Q(1)越接近1,DC增益越高,低频性能越好,但对模型误差越敏感;Q(z)的截止频率越低,高频稳定性越好,但抑制高频谐波的能力越弱。
五、性能指标:收敛速度与鲁棒性
-
收敛速度: 指系统在阶跃参考或扰动输入下,误差衰减到稳态值所需的时间(通常以周期数衡量)。主要由
k_r和Q(z)决定:-
误差动态可近似为
e_{k+1} ≈ Q(1)(1 - k_r G_{eff}) e_k,其中G_{eff}是等效增益。 -
要使误差指数衰减 (
|e_{k+1}/e_k| < 1),需|Q(1)(1 - k_r G_{eff})| < 1。 -
结论: 增大
k_r或增大Q(1)(更接近1) 可以加快收敛速度,但以牺牲鲁棒性为代价。
-
-
鲁棒性: 指系统在存在被控对象模型不确定性 (
ΔP(z)) 或参数变化时保持稳定的能力。Q(z)和k_r是主要调节手段:-
Q(z)的引入显著提高了鲁棒性,通过衰减高频增益降低了模型高频段误差的影响。 -
较小的
k_r也直接增强了鲁棒性。 -
鲁棒稳定性可通过修改的小增益条件分析:
|| ΔP(z) / P(z) ||_∞ < 1 / || S(z) T_m(z) ||_∞,其中S(z)是灵敏度函数。重复控制器降低了目标频带的|S(e^{jω_k})|,但也可能在其他频带增大|S|或|T_m|,影响鲁棒性。
-
六、改进方向:突破局限,适应多变场景
传统重复控制器存在固有局限:
-
周期敏感性: 性能严重依赖对周期
T的精确已知。若T变化或存在抖动 (Jitter),性能急剧下降。 -
长周期问题:
N = T/Ts很大时,z^{-N}需要大量存储空间,且收敛慢 (k_r小)。 -
非稳态性能: 在启动或参考/扰动突变时,可能因误差积累产生较大瞬时冲击。
改进方案:
-
自适应重复控制 (Adaptive RC):
-
核心:在线估计或适应周期
T(N)。 -
方法:基于误差频谱分析、锁相环 (PLL)、LMS/RLS 自适应算法等调整
N或滤波器参数。 -
应用:变频驱动的谐波抑制、转速波动的伺服控制。
-
-
分数阶重复控制 (Fractional Order RC):
-
核心:利用分数阶时延
z^{-N-δ}(0<δ<1) 或分数阶内模。 -
优势:能在基频
ω0的非整数倍频率 ((k + δ)ω0) 产生高增益,更适合抑制非同步谐波或处理周期不确定性问题。设计更复杂。
-
-
高阶重复控制 (High-Order RC):
-
核心:内模使用
1/(1 - β z^{-N})^K(β<1, K>1) 或并联多个不同N的内模。 -
优势:可拓宽高增益频带,提高对周期微小变化的鲁棒性,或针对特定阶次谐波进行优化。结构更复杂。
-
-
基于 FIR/IIR 滤波器的内模近似:
-
核心:用有限阶的 FIR 或 IIR 滤波器 (如梳状滤波器
C(z) = (1 - α^K z^{-K}) / (1 - α z^{-1})) 近似1/(1 - z^{-N})。 -
优势:显著减少内存需求 (
N大时),易于实现。近似精度和稳定性需仔细设计。
-
-
与其它先进控制的融合:
-
鲁棒重复控制: 结合 H∞ 或 μ 综合,在保证鲁棒稳定性的前提下优化性能。
-
模糊/神经网络重复控制: 用智能方法在线优化
k_r、Q(z)参数或C(z),适应非线性、时变系统。 -
学习控制 (ILC): ILC 与 RC 有深刻联系(都基于内模)。RC 可视为在线的、周期内运行的 ILC;ILC 是离线的、逐周期更新的。两者可结合。
-
七、总结:精准控制周期性世界的利器
重复控制算法凭借其独特的内核——基于时延的正反馈内模结构,为周期性信号的精准跟踪和周期性扰动的强力抑制提供了一种强大而优雅的解决方案。其核心优势在于能够在特定基频及其所有整数倍谐波处提供理论上的无穷大增益,从而实现零稳态误差。
掌握重复控制的关键在于深刻理解其工作原理(内模原理)、核心组件(内模 1/(1-z^{-N})、低通滤波器 Q(z)、补偿器 C(z)、增益 k_r、超前 z^{-d})的设计哲学及其对系统稳定性(小增益定理、奈奎斯特判据)和性能(收敛速度、鲁棒性)的深刻影响。
面对传统重复控制对周期精确性的依赖、长周期实现代价以及瞬态性能等挑战,自适应 RC、分数阶 RC、高阶 RC、FIR/IIR 近似以及与其他先进控制策略(鲁棒控制、智能控制、ILC)的融合,代表了该领域充满活力的发展方向。
重复控制的价值不仅在于其理论深度,更在于其解决实际工程中普遍存在的周期性控制难题的强大能力。 从提升电网绿色能源接入质量到保障海量数据存储的可靠性,从驱动工业机器人的精准运动到创造安静的电器使用环境,这项技术持续赋能现代工业的精密化与智能化发展。
希望这篇深度解析能为你揭开重复控制的神秘面纱,助你在解决周期性控制难题时,多一把精准而强大的钥匙。


















 1033
1033

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











