




注:本文为 “信号描述 ” 相关合辑。
图片清晰度受引文原图所限。
略作重排,未整理去重。
如有内容异常,请看原文。
信号的描述
一、信号的多维度描述
信号可从物理、数学和形态三个维度进行定义,各维度描述既相互独立又相互关联,共同构成对信号的完整认知。
(一)物理描述
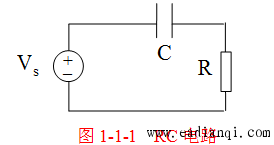
从物理本质上看,信号是信息寄寓的变化形式,其物理描述对应信号的物理量,即信号的具体名称。例如:在RC电路中,电流信号与电压信号均为信号的物理描述。
(二)数学描述
从数学角度出发,信号是一个或多个变量的函数。变量的个数决定了信号的维度:
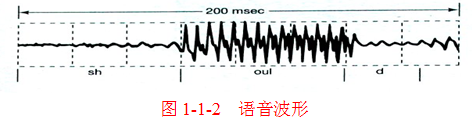
- 单变量函数对应一维信号(如语音信号,以时间为变量);
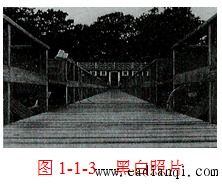
- 双变量函数对应二维信号(如黑白图像,以平面空间位置为变量)。
(三)形态描述
从形态表现上,信号以波形或图像的形式呈现,可直观反映信号的变化规律,帮助建立对信号的主观认知。例如:
-
语音信号表现为声压随时间变化的一维波形;
-
黑白照片表现为亮度随空间位置(x,y)变化的二维图像。
二、信号的分类
在信号与系统分析中,根据信号的时间函数特性,可将信号分为以下三类:
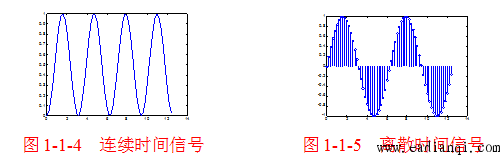
(一)连续时间信号与离散时间信号
两类信号的区别在于自变量的取值方式,具体定义与表示如下表所示:
| 信号类型 | 定义 | 自变量特性 | 表示符号 |
|---|---|---|---|
| 连续时间信号 | 自变量可在连续区间内任意取值的信号 | 自变量 t t t 为连续变量(取值范围通常为 ( − ∞ , + ∞ ) (-\infty,+\infty) (−∞,+∞)) | x ( t ) x(t) x(t) |
| 离散时间信号 | 自变量仅在一组离散值上取值的信号 | 自变量 n n n 为整数(取值范围通常为 { … , − 2 , − 1 , 0 , 1 , 2 , … } \{\dots,-2,-1,0,1,2,\dots\} {…,−2,−1,0,1,2,…}) | x [ n ] x[n] x[n] |
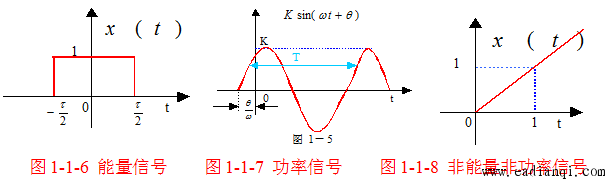
(二)能量信号与功率信号
能量信号与功率信号的划分基于信号的能量和平均功率定义,需分别针对连续时间信号与离散时间信号进行计算。
1. 连续时间信号 x ( t ) x(t) x(t) 的能量与平均功率
- 能量
E
∞
E_{\infty}
E∞:信号在无限时间区间内的能量总和,定义为:
E ∞ = lim T → ∞ ∫ − T T ∣ x ( t ) ∣ 2 d t E_{\infty} = \lim_{T \to \infty} \int_{-T}^{T} |x(t)|^2 dt E∞=T→∞lim∫−TT∣x(t)∣2dt - 平均功率
P
∞
P_{\infty}
P∞:信号在无限时间区间内的平均功率,定义为:
P ∞ = lim T → ∞ 1 2 T ∫ − T T ∣ x ( t ) ∣ 2 d t P_{\infty} = \lim_{T \to \infty} \frac{1}{2T} \int_{-T}^{T} |x(t)|^2 dt P∞=T→∞lim2T1∫−TT∣x(t)∣2dt
2. 离散时间信号 x [ n ] x[n] x[n] 的能量与平均功率
- 能量
E
E
E:信号在无限离散时间点上的能量总和,定义为:
E = lim N → ∞ ∑ n = − N N ∣ x [ n ] ∣ 2 E = \lim_{N \to \infty} \sum_{n=-N}^{N} |x[n]|^2 E=N→∞limn=−N∑N∣x[n]∣2 - 平均功率
P
P
P:信号在无限离散时间点上的平均功率,定义为:
P = lim N → ∞ 1 2 N + 1 ∑ n = − N N ∣ x [ n ] ∣ 2 P = \lim_{N \to \infty} \frac{1}{2N+1} \sum_{n=-N}^{N} |x[n]|^2 P=N→∞lim2N+11n=−N∑N∣x[n]∣2
3. 信号类型判定
- 能量信号:当 T → ∞ T \to \infty T→∞(或 N → ∞ N \to \infty N→∞)时,能量 E E E 为有限值,平均功率 P = 0 P = 0 P=0;
- 功率信号:当 T → ∞ T \to \infty T→∞(或 N → ∞ N \to \infty N→∞)时,能量 E → ∞ E \to \infty E→∞,平均功率 P P P 为有限值;
- 非能量非功率信号:既不满足能量信号条件,也不满足功率信号条件的信号(如脉冲信号、斜坡信号)。
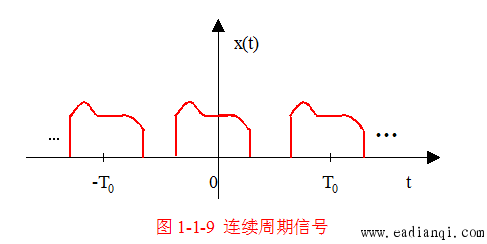
(三)周期信号与非周期信号
周期信号是指信号波形随时间(或离散时间点)周期性重复的信号,非周期信号则无重复规律。
1. 连续时间周期信号
- 定义:若存在非零常数
T
0
T_0
T0(称为基波周期),使得对所有
t
t
t 均满足:
x ( t ) = x ( t + k T 0 ) , k = 0 , ± 1 , ± 2 , … x(t) = x(t + kT_0), \quad k = 0, \pm1, \pm2, \dots x(t)=x(t+kT0),k=0,±1,±2,…
则称 x ( t ) x(t) x(t) 为连续时间周期信号。 - 基波频率:与基波周期对应的角频率,定义为
ω
0
=
2
π
T
0
\omega_0 = \frac{2\pi}{T_0}
ω0=T02π;
典型示例: sin ( ω 0 t ) \sin(\omega_0 t) sin(ω0t)、 cos ( ω 0 t ) \cos(\omega_0 t) cos(ω0t) 等正弦信号。
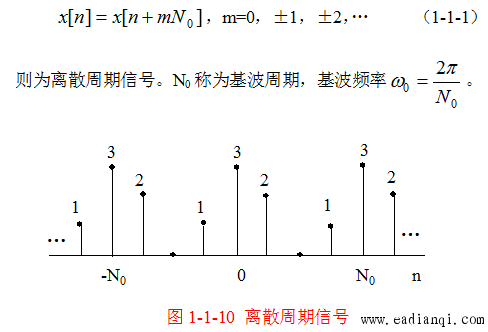
2. 离散时间周期信号
- 定义:若存在正整数
N
0
N_0
N0(称为基波周期),使得对所有
n
n
n 均满足:
x [ n ] = x [ n + m N 0 ] , m = 0 , ± 1 , ± 2 , … x[n] = x[n + mN_0], \quad m = 0, \pm1, \pm2, \dots x[n]=x[n+mN0],m=0,±1,±2,…
则称 x [ n ] x[n] x[n] 为离散时间周期信号。 - 基波频率:与基波周期对应的角频率,定义为
ω
0
=
2
π
N
0
\omega_0 = \frac{2\pi}{N_0}
ω0=N02π。
3. 组合信号的周期性判定
组合信号(如 f 1 ( t ) + f 2 ( t ) f_1(t) + f_2(t) f1(t)+f2(t) 或 f 1 [ n ] + f 2 [ n ] f_1[n] + f_2[n] f1[n]+f2[n])的周期性需根据各分量信号的周期判断:
- 连续时间组合信号:设 f 1 ( t ) f_1(t) f1(t) 的基波周期为 T 1 T_1 T1, f 2 ( t ) f_2(t) f2(t) 的基波周期为 T 2 T_2 T2。若 T 1 T 2 = n 1 n 2 \frac{T_1}{T_2} = \frac{n_1}{n_2} T2T1=n2n1( n 1 , n 2 n_1, n_2 n1,n2 为互质正整数),则组合信号为周期信号,其基波周期为 T 0 = LCM ( T 1 , T 2 ) = n 2 T 1 = n 1 T 2 T_0 = \text{LCM}(T_1, T_2) = n_2T_1 = n_1T_2 T0=LCM(T1,T2)=n2T1=n1T2;若 T 1 T 2 \frac{T_1}{T_2} T2T1 为无理数,则组合信号为非周期信号。
- 离散时间组合信号:设 f 1 [ n ] f_1[n] f1[n] 的基波周期为 N 1 N_1 N1, f 2 [ n ] f_2[n] f2[n] 的基波周期为 N 2 N_2 N2,则组合信号一定为周期信号,其基波周期为 N 0 = LCM ( N 1 , N 2 ) N_0 = \text{LCM}(N_1, N_2) N0=LCM(N1,N2)( LCM \text{LCM} LCM 表示最小公倍数)。
三、信号的基本时域变换
信号的时域变换包括时移、反射、尺度变换,变换仅改变信号的时域位置或形态,不改变信号的本质特性。
(一)时移
时移是指信号沿时间轴(或离散时间轴)平移,信号的波形与幅度保持不变。
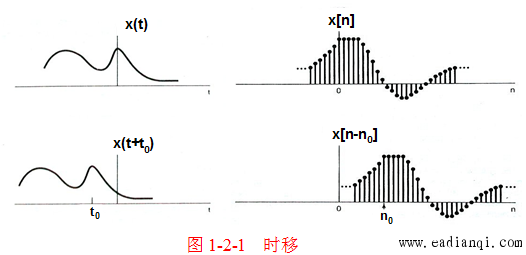
1. 连续时间信号的时移
- 变换形式: x ( t − t 0 ) x(t - t_0) x(t−t0)( t 0 t_0 t0 为时移量);
- 时移规律:
- 当 t 0 > 0 t_0 > 0 t0>0 时,信号 x ( t ) x(t) x(t) 沿时间轴右移(延时);
- 当 t 0 < 0 t_0 < 0 t0<0 时,信号 x ( t ) x(t) x(t) 沿时间轴左移(超前)(可表示为 x ( t + ∣ t 0 ∣ ) x(t + |t_0|) x(t+∣t0∣))。
2. 离散时间信号的时移
- 变换形式: x [ n − m ] x[n - m] x[n−m]( m m m 为时移量,且 m m m 为整数);
- 时移规律:
- 当 m > 0 m > 0 m>0 时,信号 x [ n ] x[n] x[n] 沿离散时间轴右移(延时);
- 当 m < 0 m < 0 m<0 时,信号 x [ n ] x[n] x[n] 沿离散时间轴左移(超前)(可表示为 x [ n + ∣ m ∣ ] x[n + |m|] x[n+∣m∣])。
(二)反射
反射是指信号以时间轴原点(或离散时间轴原点)为对称轴进行反转,信号的波形形态保持不变,仅左右方向反转。
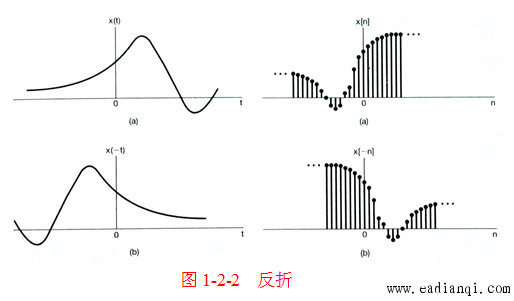
1. 连续时间信号的反射
- 变换形式: x ( − t ) x(-t) x(−t);
- 变换规律:将 x ( t ) x(t) x(t) 以 t = 0 t = 0 t=0 的纵轴为对称轴进行反折。
2. 离散时间信号的反射
- 变换形式: x [ − n ] x[-n] x[−n];
- 变换规律:将 x [ n ] x[n] x[n] 以 n = 0 n = 0 n=0 的纵轴为对称轴进行反折。
(三)尺度变换
尺度变换是指信号沿时间轴(或离散时间轴)进行压缩或扩展,改变信号的时域宽度,需注意离散信号的尺度变换存在采样点丢失问题。
1. 连续时间信号的尺度变换
- 变换形式: x ( a t ) x(at) x(at)( a a a 为尺度因子);
- 变换规律:
- 当 a > 1 a > 1 a>1 时,信号 x ( t ) x(t) x(t) 沿时间轴压缩(时域宽度减小);
- 当 0 < a < 1 0 < a < 1 0<a<1 时,信号 x ( t ) x(t) x(t) 沿时间轴扩展(时域宽度增大);
- 当 a < 0 a < 0 a<0 时,信号 x ( t ) x(t) x(t) 先反射(因负号),再按 ∣ a ∣ |a| ∣a∣ 进行压缩或扩展。
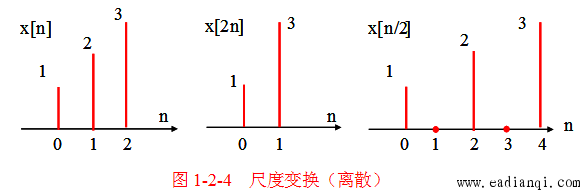
2. 离散时间信号的尺度变换
- 变换形式: x [ a n ] x[an] x[an]( a a a 为正整数尺度因子);
- 变换规律:
- 当 a > 1 a > 1 a>1 时,信号 x [ n ] x[n] x[n] 沿离散时间轴压缩,但会丢失非 a a a 整数倍的采样点,无法从压缩后的信号恢复原信号;
- 当 a = 1 k a = \frac{1}{k} a=k1( k k k 为正整数)时,信号 x [ n ] x[n] x[n] 沿离散时间轴扩展,需在原采样点之间插入零值(或插值)以保持信号形态。
3. 综合变换公式
时移、反射、尺度变换的综合表达式可统一表示为:
- 正向尺度与平移: x ( a t ± b ) = x [ a ( t ± b a ) ] x(at \pm b) = x\left[a\left(t \pm \frac{b}{a}\right)\right] x(at±b)=x[a(t±ab)];
- 反向尺度与平移: x ( − a t ± b ) = x [ − a ( t ∓ b a ) ] x(-at \pm b) = x\left[-a\left(t \mp \frac{b}{a}\right)\right] x(−at±b)=x[−a(t∓ab)]。
变换顺序建议:对时间变量 t t t(或 n n n)进行变换时,建议按“尺度变换→反射→时移”的顺序操作,可避免因顺序混乱导致的错误(在卷积运算中需注意“先反射再时移”的特殊场景)。
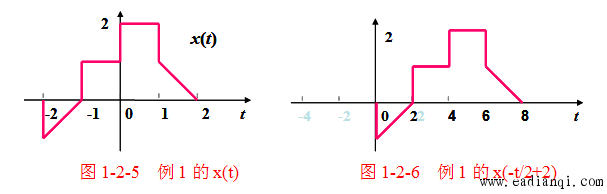
(四)变换示例
已知 x ( t ) x(t) x(t) 的波形如图 1-2-5 所示(波形范围: t ∈ [ − 1 , 1 ] t \in [-1,1] t∈[−1,1],幅度为 2),需绘制 x ( − 1 2 t + 1 ) x\left(-\frac{1}{2}t + 1\right) x(−21t+1) 的波形,步骤如下:
- 尺度变换:对 x ( t ) x(t) x(t) 进行扩展(尺度因子 a = 1 2 a = \frac{1}{2} a=21),得到 x ( 1 2 t ) x\left(\frac{1}{2}t\right) x(21t)(时域宽度从 2 2 2 扩展为 4 4 4,范围 t ∈ [ − 2 , 2 ] t \in [-2,2] t∈[−2,2]);
- 反射变换:对 x ( 1 2 t ) x\left(\frac{1}{2}t\right) x(21t) 进行反射,得到 x ( − 1 2 t ) x\left(-\frac{1}{2}t\right) x(−21t)(波形以 t = 0 t = 0 t=0 为轴反转,范围仍为 t ∈ [ − 2 , 2 ] t \in [-2,2] t∈[−2,2]);
- 时移变换:对 x ( − 1 2 t ) x\left(-\frac{1}{2}t\right) x(−21t) 右移 2 2 2 个单位(因 − 1 2 t + 1 = − 1 2 ( t − 2 ) -\frac{1}{2}t + 1 = -\frac{1}{2}(t - 2) −21t+1=−21(t−2)),得到 x ( − 1 2 ( t − 2 ) ) = x ( − 1 2 t + 1 ) x\left(-\frac{1}{2}(t - 2)\right) = x\left(-\frac{1}{2}t + 1\right) x(−21(t−2))=x(−21t+1)(最终范围 t ∈ [ 0 , 4 ] t \in [0,4] t∈[0,4])。
四、信号的奇偶分解
任意信号均可分解为偶分量(Even Component)与奇分量(Odd Component)之和,且分解满足唯一性;同时,信号的能量等于其偶分量能量与奇分量能量之和(能量守恒)。
(一)连续时间信号的奇偶分解
-
分解公式:
x ( t ) = x e ( t ) + x o ( t ) x(t) = x_e(t) + x_o(t) x(t)=xe(t)+xo(t)
其中:- 偶分量
x
e
(
t
)
x_e(t)
xe(t)(满足
x
e
(
−
t
)
=
x
e
(
t
)
x_e(-t) = x_e(t)
xe(−t)=xe(t)):
x e ( t ) = 1 2 [ x ( t ) + x ( − t ) ] x_e(t) = \frac{1}{2}\left[x(t) + x(-t)\right] xe(t)=21[x(t)+x(−t)] - 奇分量
x
o
(
t
)
x_o(t)
xo(t)(满足
x
o
(
−
t
)
=
−
x
o
(
t
)
x_o(-t) = -x_o(t)
xo(−t)=−xo(t)):
x o ( t ) = 1 2 [ x ( t ) − x ( − t ) ] x_o(t) = \frac{1}{2}\left[x(t) - x(-t)\right] xo(t)=21[x(t)−x(−t)]
- 偶分量
x
e
(
t
)
x_e(t)
xe(t)(满足
x
e
(
−
t
)
=
x
e
(
t
)
x_e(-t) = x_e(t)
xe(−t)=xe(t)):
-
能量关系:
∫ − ∞ ∞ x 2 ( t ) d t = ∫ − ∞ ∞ x e 2 ( t ) d t + ∫ − ∞ ∞ x o 2 ( t ) d t \int_{-\infty}^{\infty} x^2(t) dt = \int_{-\infty}^{\infty} x_e^2(t) dt + \int_{-\infty}^{\infty} x_o^2(t) dt ∫−∞∞x2(t)dt=∫−∞∞xe2(t)dt+∫−∞∞xo2(t)dt
(二)离散时间信号的奇偶分解
-
分解公式:
x [ n ] = x e [ n ] + x o [ n ] x[n] = x_e[n] + x_o[n] x[n]=xe[n]+xo[n]
其中:- 偶分量
x
e
[
n
]
x_e[n]
xe[n](满足
x
e
[
−
n
]
=
x
e
[
n
]
x_e[-n] = x_e[n]
xe[−n]=xe[n]):
x e [ n ] = 1 2 [ x [ n ] + x [ − n ] ] x_e[n] = \frac{1}{2}\left[x[n] + x[-n]\right] xe[n]=21[x[n]+x[−n]] - 奇分量
x
o
[
n
]
x_o[n]
xo[n](满足
x
o
[
−
n
]
=
−
x
o
[
n
]
x_o[-n] = -x_o[n]
xo[−n]=−xo[n]):
x o [ n ] = 1 2 [ x [ n ] − x [ − n ] ] x_o[n] = \frac{1}{2}\left[x[n] - x[-n]\right] xo[n]=21[x[n]−x[−n]]
- 偶分量
x
e
[
n
]
x_e[n]
xe[n](满足
x
e
[
−
n
]
=
x
e
[
n
]
x_e[-n] = x_e[n]
xe[−n]=xe[n]):
-
能量关系:
∑ k = − ∞ ∞ x 2 [ k ] = ∑ k = − ∞ ∞ x e 2 [ k ] + ∑ k = − ∞ ∞ x o 2 [ k ] \sum_{k=-\infty}^{\infty} x^2[k] = \sum_{k=-\infty}^{\infty} x_e^2[k] + \sum_{k=-\infty}^{\infty} x_o^2[k] k=−∞∑∞x2[k]=k=−∞∑∞xe2[k]+k=−∞∑∞xo2[k]
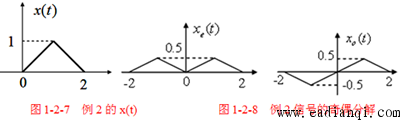
(三)分解示例
已知 x ( t ) x(t) x(t) 的波形如图 1-2-7 所示(波形: t ∈ [ 0 , 2 ] t \in [0,2] t∈[0,2] 时 x ( t ) = t x(t) = t x(t)=t,其余时刻 x ( t ) = 0 x(t) = 0 x(t)=0),求其偶分量 x e ( t ) x_e(t) xe(t) 与奇分量 x o ( t ) x_o(t) xo(t):
- 计算 x ( − t ) x(-t) x(−t): t ∈ [ − 2 , 0 ] t \in [-2,0] t∈[−2,0] 时 x ( − t ) = − t x(-t) = -t x(−t)=−t,其余时刻 x ( − t ) = 0 x(-t) = 0 x(−t)=0;
- 偶分量 x e ( t ) = 1 2 [ x ( t ) + x ( − t ) ] x_e(t) = \frac{1}{2}\left[x(t) + x(-t)\right] xe(t)=21[x(t)+x(−t)]: t ∈ [ 0 , 2 ] t \in [0,2] t∈[0,2] 时 x e ( t ) = t 2 x_e(t) = \frac{t}{2} xe(t)=2t, t ∈ [ − 2 , 0 ] t \in [-2,0] t∈[−2,0] 时 x e ( t ) = − t 2 x_e(t) = -\frac{t}{2} xe(t)=−2t,其余时刻 x e ( t ) = 0 x_e(t) = 0 xe(t)=0;
- 奇分量 x o ( t ) = 1 2 [ x ( t ) − x ( − t ) ] x_o(t) = \frac{1}{2}\left[x(t) - x(-t)\right] xo(t)=21[x(t)−x(−t)]: t ∈ [ 0 , 2 ] t \in [0,2] t∈[0,2] 时 x o ( t ) = t 2 x_o(t) = \frac{t}{2} xo(t)=2t, t ∈ [ − 2 , 0 ] t \in [-2,0] t∈[−2,0] 时 x o ( t ) = t 2 x_o(t) = \frac{t}{2} xo(t)=2t,其余时刻 x o ( t ) = 0 x_o(t) = 0 xo(t)=0。
五、信号的基本运算
信号的基本运算包括加减、相乘、微分(仅连续信号)、积分(仅连续信号),运算均在对应时间点(或时间段)上进行。
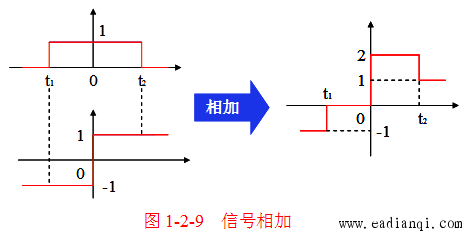
(一)加减运算
- 定义:两个信号在同一时间点(或离散时间点)的幅度值相加或相减;
- 连续时间信号: x ( t ) = x 1 ( t ) ± x 2 ( t ) x(t) = x_1(t) \pm x_2(t) x(t)=x1(t)±x2(t);
- 离散时间信号: x [ n ] = x 1 [ n ] ± x 2 [ n ] x[n] = x_1[n] \pm x_2[n] x[n]=x1[n]±x2[n];
- 运算规则:对所有 t t t(或 n n n),逐点计算 x 1 x_1 x1 与 x 2 x_2 x2 的幅度代数和。
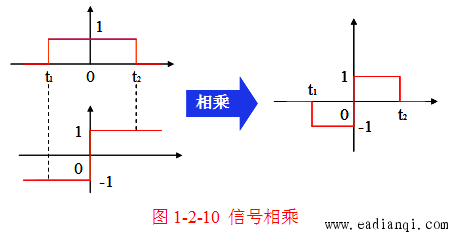
(二)相乘运算
- 定义:两个信号在同一时间点(或离散时间点)的幅度值相乘;
- 连续时间信号: x ( t ) = x 1 ( t ) ⋅ x 2 ( t ) x(t) = x_1(t) \cdot x_2(t) x(t)=x1(t)⋅x2(t);
- 离散时间信号: x [ n ] = x 1 [ n ] ⋅ x 2 [ n ] x[n] = x_1[n] \cdot x_2[n] x[n]=x1[n]⋅x2[n];
- 运算规则:对所有 t t t(或 n n n),逐点计算 x 1 x_1 x1 与 x 2 x_2 x2 的幅度乘积(典型应用:信号调制)。
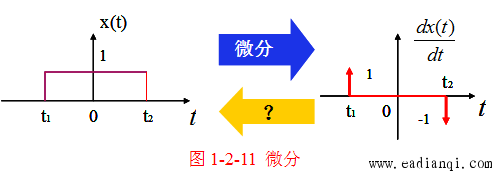
(三)微分运算(仅连续时间信号)
- 定义:信号对时间的一阶导数,反映信号幅度随时间的变化率;
- 定义式: y ( t ) = d x ( t ) d t = x ( 1 ) ( t ) y(t) = \frac{dx(t)}{dt} = x^{(1)}(t) y(t)=dtdx(t)=x(1)(t);
- 关键特性:在信号的间断点处,微分结果为冲激信号,冲激强度等于间断点处的幅度跳变值(例如:若 x ( t ) x(t) x(t) 在 t = t 0 t = t_0 t=t0 处从 A A A 跳变到 B B B,则 d x ( t ) d t \frac{dx(t)}{dt} dtdx(t) 在 t = t 0 t = t_0 t=t0 处包含强度为 B − A B - A B−A 的冲激)。
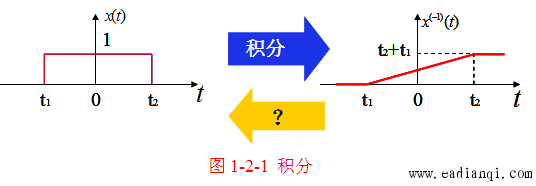
(四)积分运算(仅连续时间信号)
- 定义:信号从 − ∞ -\infty −∞ 到当前时刻 t t t 的定积分,反映信号幅度随时间的累积效应;
- 定义式: y ( t ) = ∫ − ∞ t x ( τ ) d τ = x ( − 1 ) ( t ) y(t) = \int_{-\infty}^{t} x(\tau) d\tau = x^{(-1)}(t) y(t)=∫−∞tx(τ)dτ=x(−1)(t);
- 关键特性:分段积分时,需考虑前一段积分结果对当前积分的影响(即积分具有“记忆性”),积分后的信号波形比原信号更平滑(可抑制高频噪声)。
六、连续时间典型信号
连续时间典型信号包括复指数信号、正弦信号,二者通过欧拉公式建立关联,是信号与系统分析的基础信号。
复指数信号是最常用的信号,其表示式为:
x
(
t
)
=
C
e
a
t
x(t) = Ce^{at}
x(t)=Ceat,
其中
C
C
C 和
a
a
a 一般为复数,
C
=
α
+
j
β
C = \alpha + j\beta
C=α+jβ,
a
=
σ
+
j
ω
a = \sigma + j\omega
a=σ+jω。
连续实指数信号
若 C C C 和 a a a 为实数,则为实指数信号,波形如图 1-3-1 所示。
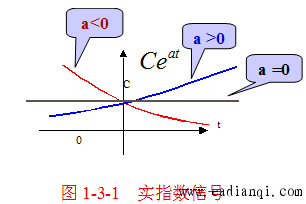
- 当 a < 0 a < 0 a<0 时,信号衰减。
- 当 a > 0 a > 0 a>0 时,信号增长。
连续虚指数信号
令 a = − j ω 0 a = -j\omega_0 a=−jω0,则有 x ( t ) = e j ω 0 t x(t) = e^{j\omega_0 t} x(t)=ejω0t
例:证明连续虚指数信号是周期信号。
证明:若存在 T T T,使得 e j ω 0 ( t + T ) = e j ω 0 t e^{j\omega_0(t+T)} = e^{j\omega_0 t} ejω0(t+T)=ejω0t 对所有 t t t 成立,则 x ( t ) x(t) x(t) 是周期的。为此必须有 e j ω 0 T = 1 e^{j\omega_0 T} = 1 ejω0T=1
当 T = 2 π ω 0 T = \frac{2\pi}{\omega_0} T=ω02π 时,对所有 t t t 都满足 x ( t ) = x ( t + T ) x(t) = x(t+T) x(t)=x(t+T),因此 x ( t ) x(t) x(t) 是周期信号。
欧拉公式(Euler’s Relation)
e j ω t = cos ( ω t ) + j sin ( ω t ) e^{j\omega t} = \cos(\omega t) + j\sin(\omega t) ejωt=cos(ωt)+jsin(ωt)
由此可得:
cos
(
ω
t
)
=
e
j
ω
t
+
e
−
j
ω
t
2
sin
(
ω
t
)
=
e
j
ω
t
−
e
−
j
ω
t
2
j
\cos(\omega t) = \frac{e^{j\omega t} + e^{-j\omega t}}{2}\\[1em] \sin(\omega t) = \frac{e^{j\omega t} - e^{-j\omega t}}{2j}
cos(ωt)=2ejωt+e−jωtsin(ωt)=2jejωt−e−jωt
e j ( ω t + ϕ ) = cos ( ω t + ϕ ) + j sin ( ω t + ϕ ) e^{j(\omega t + \phi)} = \cos(\omega t + \phi) + j\sin(\omega t + \phi) ej(ωt+ϕ)=cos(ωt+ϕ)+jsin(ωt+ϕ)
取实部则得到余弦信号:
x
(
t
)
=
A
cos
(
ω
t
+
ϕ
)
x(t) = A\cos(\omega t + \phi)
x(t)=Acos(ωt+ϕ)
余弦信号是信号与系统分析中经常要用到的一类典型信号,如图 1-3-2 所示。
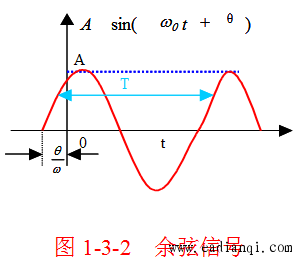
余弦信号具有以下性质:
- ω \omega ω 越大,振荡频率越高。
- 对任何 ω \omega ω,都是周期的。
连续周期复指数信号
连续周期复指数信号具有两个性质:
- 基波频率相同。
- 周期信号都可以分解为成谐波关系的正弦信号的线性组合,即傅立叶级数表示。
一个成谐波关系的复指数信号的集合:一组基波频率是某一正频率
ω
0
\omega_0
ω0 的整数倍的周期复指数信号:
x
k
(
t
)
=
e
j
k
ω
0
t
x_k(t) = e^{jk\omega_0 t}
xk(t)=ejkω0t
其中
k
=
0
,
±
1
,
±
2
,
…
k = 0, \pm1, \pm2, \ldots
k=0,±1,±2,…。基波频率
ω
k
=
k
ω
0
\omega_k = k\omega_0
ωk=kω0,基波周期
T
k
=
T
0
∣
k
∣
T_k = \frac{T_0}{|k|}
Tk=∣k∣T0,它们有一个公共周期
T
0
T_0
T0。
一般复指数信号
一般复指数信号可以通过实指数信号和周期复指数信号来表示:
x
(
t
)
=
C
e
a
t
x(t) = Ce^{at}
x(t)=Ceat
其中
a
=
σ
+
j
ω
a = \sigma + j\omega
a=σ+jω,
C
=
∣
C
∣
e
j
θ
C = |C|e^{j\theta}
C=∣C∣ejθ。
则有:
x
(
t
)
=
∣
C
∣
e
(
σ
+
j
ω
)
t
=
∣
C
∣
e
σ
t
e
j
(
ω
t
+
θ
)
x(t) = |C|e^{(\sigma + j\omega)t} = |C|e^{\sigma t}e^{j(\omega t + \theta)}
x(t)=∣C∣e(σ+jω)t=∣C∣eσtej(ωt+θ)
一般复指数信号可以看成是实指数信号 e σ t e^{\sigma t} eσt 和周期复指数信号 e j ω t e^{j\omega t} ejωt 相乘的结果。它包含了这两个信号的基本特性:参数 ω \omega ω 反映了振荡信号的变化频率,而参数 σ \sigma σ 则反映了振荡信号峰值的变化趋势,用包络线 ∣ C ∣ e σ t |C|e^{\sigma t} ∣C∣eσt 来描述信号峰值的变化趋势,如图 1-3-3 所示。
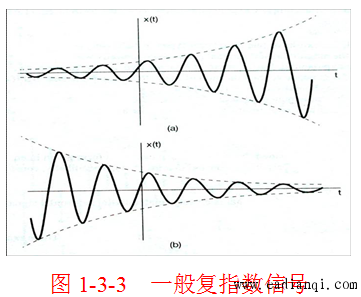
- 当 σ > 0 \sigma > 0 σ>0 时,是幅度增长的正弦信号。
- 当 σ < 0 \sigma < 0 σ<0 时,是幅度衰减的正弦信号。
七、离散时间典型信号
离散时间典型信号包括复指数序列、正弦序列、单位脉冲序列、单位阶跃序列,其特性与连续时间信号既有相似性,也存在本质差异(如离散信号的频率周期性)。
(一)复指数序列
复指数序列是离散时间信号的基础形式,常用两种表达式表示,需注意其频率的周期性特性。
1. 基本形式
- 形式 1(常用): x [ n ] = C α n x[n] = C \alpha^n x[n]=Cαn( C C C 为复振幅, α \alpha α 为复底数);
- 形式 2(与连续对应): x [ n ] = C e β n x[n] = C e^{\beta n} x[n]=Ceβn( β \beta β 为复频率, α = e β \alpha = e^{\beta} α=eβ)。
2. 实指数序列
当 C C C 与 α \alpha α 均为实数时, x [ n ] = ∣ C ∣ α n x[n] = |C| \alpha^n x[n]=∣C∣αn,根据 α \alpha α 的取值分为四种情况:

- α > 1 \alpha > 1 α>1:序列幅度随 n n n 指数增长;
- 0 < α < 1 0 < \alpha < 1 0<α<1:序列幅度随 n n n 指数衰减;
- − 1 < α < 0 -1 < \alpha < 0 −1<α<0:序列幅度随 n n n 指数衰减,且正负交替;
- α < − 1 \alpha < -1 α<−1:序列幅度随 n n n 指数增长,且正负交替。
3. 周期特性
离散时间复指数序列
e
j
ω
0
n
e^{j\omega_0 n}
ejω0n 具有独特的频率周期性:
e
j
(
ω
0
+
2
k
π
)
n
=
e
j
2
k
π
n
⋅
e
j
ω
0
n
=
e
j
ω
0
n
,
k
=
0
,
±
1
,
±
2
,
…
e^{j(\omega_0 + 2k\pi)n} = e^{j2k\pi n} \cdot e^{j\omega_0 n} = e^{j\omega_0 n}, \quad k = 0, \pm1, \pm2, \dots
ej(ω0+2kπ)n=ej2kπn⋅ejω0n=ejω0n,k=0,±1,±2,…
即:频率相差
2
π
2\pi
2π 整数倍的离散复指数序列完全相同,因此离散信号的有效频率范围为
[
−
π
,
π
]
[-\pi, \pi]
[−π,π] 或
[
0
,
2
π
]
[0, 2\pi]
[0,2π]。
4. 周期性判定
离散时间复指数序列
e
j
ω
0
n
e^{j\omega_0 n}
ejω0n 为周期序列的充要条件是:存在正整数
N
N
N(周期),使得对所有
n
n
n 满足
e
j
ω
0
(
n
+
N
)
=
e
j
ω
0
n
e^{j\omega_0(n + N)} = e^{j\omega_0 n}
ejω0(n+N)=ejω0n,即:
e
j
ω
0
N
=
1
⟹
ω
0
N
=
2
m
π
(
m
为正整数
)
e^{j\omega_0 N} = 1 \implies \omega_0 N = 2m\pi \quad (m 为正整数)
ejω0N=1⟹ω0N=2mπ(m为正整数)
整理得:
ω
0
2
π
=
m
N
\frac{\omega_0}{2\pi} = \frac{m}{N}
2πω0=Nm(即
ω
0
2
π
\frac{\omega_0}{2\pi}
2πω0 为有理数)。此时:
- 基波频率: ω 0 ′ = 2 π N = ω 0 m \omega_0' = \frac{2\pi}{N} = \frac{\omega_0}{m} ω0′=N2π=mω0;
- 基波周期: N 0 = 2 m π ω 0 N_0 = \frac{2m\pi}{\omega_0} N0=ω02mπ(取最小正整数)。
(二)正弦序列
正弦序列由复指数序列的实部或虚部得到,其频率特性与离散复指数序列一致。
1. 基本形式
x
[
n
]
=
A
cos
(
ω
0
n
+
ϕ
)
x[n] = A \cos(\omega_0 n + \phi)
x[n]=Acos(ω0n+ϕ)
其中:
- A A A 为振幅;
- ω 0 \omega_0 ω0 为角频率(单位:rad),有效范围 [ − π , π ] [-\pi, \pi] [−π,π];
- ϕ \phi ϕ 为初相位(单位:rad)。
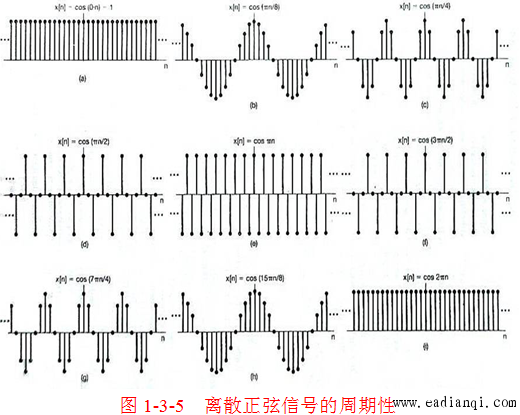
2. 频率特性
离散正弦序列的包络频率随 ω 0 \omega_0 ω0 的变化规律如下:
- 当 ω 0 = 0 \omega_0 = 0 ω0=0 或 ω 0 = 2 k π \omega_0 = 2k\pi ω0=2kπ( k k k 为整数)时, x [ n ] = A cos ( ϕ ) x[n] = A \cos(\phi) x[n]=Acos(ϕ)(直流序列,包络频率最低);
- 当 ω 0 \omega_0 ω0 从 0 0 0 增至 π \pi π 时,包络频率逐渐增高;
- 当 ω 0 = π \omega_0 = \pi ω0=π 时, x [ n ] = A cos ( π n + ϕ ) = A ( − 1 ) n cos ( ϕ ) x[n] = A \cos(\pi n + \phi) = A(-1)^n \cos(\phi) x[n]=Acos(πn+ϕ)=A(−1)ncos(ϕ)(包络频率最高);
- 当 ω 0 \omega_0 ω0 从 π \pi π 增至 2 π 2\pi 2π 时,包络频率逐渐降低,最终回到直流序列。
重要结论:离散正弦序列的最高包络频率为 π \pi π。
(三)连续与离散正弦信号对比
| 特性 | 连续时间正弦信号 cos ( ω 0 t ) \cos(\omega_0 t) cos(ω0t) | 离散时间正弦序列 cos ( ω 0 n ) \cos(\omega_0 n) cos(ω0n) |
|---|---|---|
| 振荡频率 | ω 0 \omega_0 ω0 不同,信号不同 | 频率相差 2 π 2\pi 2π 整数倍,信号相同 |
| 周期性 | 对任意 ω 0 ≠ 0 \omega_0 \neq 0 ω0=0 均为周期信号 | 仅当 ω 0 2 π = m N \large\frac{\omega_0}{2\pi} = \frac{m}{N} 2πω0=Nm( m , N m,N m,N 为正整数)时为周期序列 |
| 基波频率 | ω 0 \omega_0 ω0 | ω 0 m \frac{\omega_0}{m} mω0( m m m 为最简分数分子) |
| 基波周期 | T 0 = 2 π ω 0 T_0 = \frac{2\pi}{\omega_0} T0=ω02π( ω 0 ≠ 0 \omega_0 \neq 0 ω0=0) | N 0 = 2 m π ω 0 N_0 = \frac{2m\pi}{\omega_0} N0=ω02mπ( ω 0 ≠ 0 \omega_0 \neq 0 ω0=0,取最小正整数) |
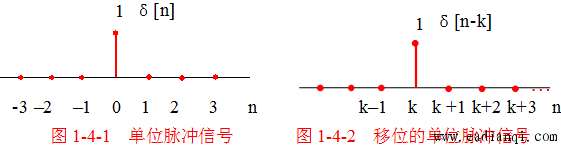
(四)单位脉冲序列
单位脉冲序列(又称单位样值序列)是离散时间信号中最基本的信号,具有“采样”特性。
1. 脉冲信号
δ [ n ] = { 1 n = 0 0 n ≠ 0 \delta[n] = \begin{cases} 1 & n = 0 \\ 0 & n \neq 0 \end{cases} δ[n]={10n=0n=0
2. 移位脉冲信号
移位
k
k
k 个单位的单位脉冲序列:
δ
[
n
−
k
]
=
{
1
n
=
k
0
n
≠
k
\delta[n - k] = \begin{cases} 1 & n = k \\ 0 & n \neq k \end{cases}
δ[n−k]={10n=kn=k
其中:
- 当 k > 0 k > 0 k>0 时,序列右移 k k k 个单位;
- 当 k < 0 k < 0 k<0 时,序列左移 ∣ k ∣ |k| ∣k∣ 个单位。
3. 采样性质
单位脉冲序列可提取信号在特定离散时间点的幅度值(采样):
- 采样 n = 0 n = 0 n=0 处幅度: x [ n ] δ [ n ] = x [ 0 ] δ [ n ] x[n] \delta[n] = x[0] \delta[n] x[n]δ[n]=x[0]δ[n];
- 采样 n = n 0 n = n_0 n=n0 处幅度: x [ n ] δ [ n − n 0 ] = x [ n 0 ] δ [ n − n 0 ] x[n] \delta[n - n_0] = x[n_0] \delta[n - n_0] x[n]δ[n−n0]=x[n0]δ[n−n0]。
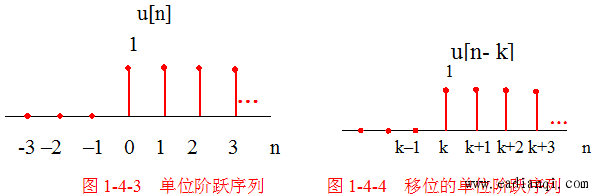
(五)单位阶跃序列
单位阶跃序列可由单位脉冲序列累加得到,常用于表示信号的“起始”特性。
1. 阶跃序列
u [ n ] = { 1 n ≥ 0 0 n < 0 u[n] = \begin{cases} 1 & n \geq 0 \\ 0 & n < 0 \end{cases} u[n]={10n≥0n<0
2. 移位阶跃序列
移位
k
k
k 个单位的单位阶跃序列:
u
[
n
−
k
]
=
{
1
n
≥
k
0
n
<
k
u[n - k] = \begin{cases} 1 & n \geq k \\ 0 & n < k \end{cases}
u[n−k]={10n≥kn<k
其中:
- 当 k > 0 k > 0 k>0 时,序列右移 k k k 个单位;
- 当 k < 0 k < 0 k<0 时,序列左移 ∣ k ∣ |k| ∣k∣ 个单位。
3. 单位脉冲序列与单位阶跃序列的关系
-
差分关系:单位脉冲序列是单位阶跃序列的一阶后向差分:
δ [ n ] = u [ n ] − u [ n − 1 ] \delta[n] = u[n] - u[n - 1] δ[n]=u[n]−u[n−1] -
累加关系:单位阶跃序列是单位脉冲序列从 − ∞ -\infty −∞ 到 n n n 的累加:
u [ n ] = ∑ m = − ∞ n δ [ m ] u[n] = \sum_{m=-\infty}^{n} \delta[m] u[n]=m=−∞∑nδ[m]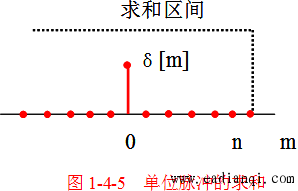
单位脉冲序列的采样性质: -
信号在 n = 0 n = 0 n=0 时的采样:
x [ n ] δ [ n ] = x [ 0 ] δ [ n ] x[n] \delta[n] = x[0] \delta[n] x[n]δ[n]=x[0]δ[n] -
信号在 n = n 0 n = n_0 n=n0 时的采样:
x [ n ] δ [ n − n 0 ] = x [ n 0 ] δ [ n − n 0 ] x[n] \delta[n - n_0] = x[n_0] \delta[n - n_0] x[n]δ[n−n0]=x[n0]δ[n−n0]
八、信号运算与变换的工程应用
在信号与系统的工程实践中,前述信号的运算、变换及典型信号模型并非孤立存在,而是广泛应用于通信、控制、图像处理等领域,以下结合文档中核心概念补充其应用逻辑:
(一)信号时移与尺度变换的应用
- 通信系统中的信号同步:在数字通信接收端,需通过时移操作(调整 t 0 t_0 t0 或 m m m)对齐接收信号与本地参考信号的时间基准,避免因传输时延导致的码间串扰。例如,对离散接收序列 x [ n − m ] x[n - m] x[n−m] 调整 m m m 值,使接收码元与本地采样时钟同步。
- 语音信号的变速播放:语音信号本质是声压随时间变化的连续信号 x ( t ) x(t) x(t),通过尺度变换 x ( a t ) x(at) x(at) 可实现变速:当 a > 1 a > 1 a>1 时,信号时域压缩,播放速度加快(音调升高);当 0 < a < 1 0 < a < 1 0<a<1 时,信号时域扩展,播放速度减慢(音调降低),且需通过插值处理避免离散信号压缩时的采样点丢失问题。
(二)能量信号与功率信号的工程判定
在通信系统设计中,需根据信号的能量/功率特性选择传输方案:
- 能量信号(如脉冲信号):能量集中在有限时间内,适合短距离、突发式传输(如雷达探测信号),需重点关注信号的峰值能量以避免传输链路过载;
- 功率信号(如正弦载波信号):功率有限但能量无限,适合长距离、持续式传输(如广播电台的载波信号),需重点控制信号的平均功率以满足频谱规范和设备功耗要求;
- 非能量非功率信号(如斜坡信号)因能量和功率均无界,实际工程中需通过截断处理转化为能量信号后使用。
(三)周期信号的谐波分解与信号传输
根据文档中“周期信号可分解为成谐波关系的正弦信号线性组合”的结论,在通信与信号处理中可实现:
- 信号调制:将低频基带信号(如语音信号)与高频正弦载波信号相乘,本质是利用正弦信号的周期性和谐波特性,将基带信号频谱搬移至高频频段,以适应无线信道的传输特性(如射频信号传输需符合特定频段的频谱规划);
- 频谱分析:通过傅里叶级数分解,可获取周期信号的各次谐波分量(基波频率 ω 0 \omega_0 ω0 的整数倍),进而分析信号的频谱结构,为滤波器设计提供依据(如通过滤除高次谐波实现信号降噪)。
(四)单位脉冲序列的采样应用
离散单位脉冲序列 δ [ n ] \delta[n] δ[n] 的采样特性是数字信号处理的基础:
- 信号采样:在模数转换(ADC)过程中,连续时间信号 x ( t ) x(t) x(t) 与周期性脉冲序列(由 δ [ n ] \delta[n] δ[n] 扩展得到)相乘,得到离散序列 x [ n ] = x ( n T s ) x[n] = x(nT_s) x[n]=x(nTs)( T s T_s Ts 为采样周期),且需满足奈奎斯特采样定理(采样频率 f s = 1 / T s f_s = 1/T_s fs=1/Ts 大于信号最高频率的2倍),避免频谱混叠;
- 系统建模:在离散系统分析中,单位脉冲序列 δ [ n ] \delta[n] δ[n] 可作为“测试信号”,通过测量系统对 δ [ n ] \delta[n] δ[n] 的响应(单位脉冲响应 h [ n ] h[n] h[n]),利用卷积运算求解系统对任意输入信号的响应,简化系统设计与分析流程。
(五)信号奇偶分解的噪声抑制
信号的奇偶分解特性可用于噪声抑制:实际采集的信号常包含偶对称噪声(如直流偏移)和奇对称噪声(如差分干扰),通过分解得到偶分量 x e ( t ) x_e(t) xe(t) 和奇分量 x o ( t ) x_o(t) xo(t),可针对性滤除某类噪声。例如,在生物医学信号(如心电图信号)处理中,通过提取偶分量可去除因电极接触不良导致的奇对称干扰,提升信号质量。
九、小结:信号类型 / 运算公式
连续信号能量
E
∞
=
lim
T
→
∞
∫
−
T
T
∣
x
(
t
)
∣
2
d
t
E_{\infty} = \lim_{T \to \infty} \int_{-T}^{T} |x(t)|^2 \, dt
E∞=T→∞lim∫−TT∣x(t)∣2dt
t
t
t 是连续时间变量;
T
T
T 是积分时间区间。
离散信号能量
E
=
lim
N
→
∞
∑
n
=
−
N
N
∣
x
[
n
]
∣
2
E = \lim_{N \to \infty} \sum_{n=-N}^{N} |x[n]|^2
E=N→∞limn=−N∑N∣x[n]∣2
n
n
n 是离散时间变量(整数);
N
N
N 是求和区间边界。
连续周期信号
x
(
t
)
=
x
(
t
+
k
T
0
)
(
k
=
0
,
±
1
,
…
)
x(t) = x(t + kT_0) \quad (k = 0, \pm1, \dots)
x(t)=x(t+kT0)(k=0,±1,…)
T
0
T_0
T0 是基波周期;
ω
0
=
2
π
/
T
0
\omega_0 = 2\pi/T_0
ω0=2π/T0 是基波频率。
离散周期信号
x
[
n
]
=
x
[
n
+
m
N
0
]
(
m
=
0
,
±
1
,
…
)
x[n] = x[n + mN_0] \quad (m = 0, \pm1, \dots)
x[n]=x[n+mN0](m=0,±1,…)
N
0
N_0
N0 是基波周期;
ω
0
=
2
π
/
N
0
\omega_0 = 2\pi/N_0
ω0=2π/N0 是基波频率。
连续信号奇偶分解
x
e
(
t
)
=
1
2
[
x
(
t
)
+
x
(
−
t
)
]
x
o
(
t
)
=
1
2
[
x
(
t
)
−
x
(
−
t
)
]
x_e(t) = \frac{1}{2}[x(t) + x(-t)]\\[1em]x_o(t) = \frac{1}{2}[x(t) - x(-t)]
xe(t)=21[x(t)+x(−t)]xo(t)=21[x(t)−x(−t)]
x
e
(
t
)
x_e(t)
xe(t) 是偶分量;
x
o
(
t
)
x_o(t)
xo(t) 是奇分量。
离散信号奇偶分解
x
e
[
n
]
=
1
2
[
x
[
n
]
+
x
[
−
n
]
]
x
o
[
n
]
=
1
2
[
x
[
n
]
−
x
[
−
n
]
]
x_e[n] = \frac{1}{2}[x[n] + x[-n]]\\[1em]x_o[n] = \frac{1}{2}[x[n] - x[-n]]
xe[n]=21[x[n]+x[−n]]xo[n]=21[x[n]−x[−n]]
x
e
[
n
]
x_e[n]
xe[n] 是偶分量;
x
o
[
n
]
x_o[n]
xo[n] 是奇分量。
复指数信号(连续)
x
(
t
)
=
C
e
(
r
+
j
ω
0
)
t
x(t) = C e^{(r + j\omega_0)t}
x(t)=Ce(r+jω0)t
C
C
C 是复振幅;
r
r
r 是衰减/增长系数;
ω
0
\omega_0
ω0 是角频率。
复指数序列(离散)
x
[
n
]
=
C
α
n
或
x
[
n
]
=
C
e
β
n
x[n] = C \alpha^n \quad \text{或} \quad x[n] = C e^{\beta n}
x[n]=Cαn或x[n]=Ceβn
C
C
C 是复振幅;
α
=
e
β
\alpha = e^{\beta}
α=eβ 是复底数;
β
\beta
β 是复频率。
单位脉冲序列
δ
[
n
]
=
{
1
n
=
0
0
n
≠
0
\delta[n] = \begin{cases} 1 & n = 0 \\ 0 & n \neq 0 \end{cases}
δ[n]={10n=0n=0
仅在
n
=
0
n = 0
n=0 处取值为1,其余时刻为0。
单位阶跃序列
u
[
n
]
=
{
1
n
≥
0
0
n
<
0
u[n] = \begin{cases} 1 & n \geq 0 \\ 0 & n < 0 \end{cases}
u[n]={10n≥0n<0
仅在
n
≥
0
n \geq 0
n≥0 处取值为 1,其余时刻为 0。
符号规范说明:
- 连续时间信号用圆括号表示(如 x ( t ) x(t) x(t)),离散时间信号用方括号表示(如 x [ n ] x[n] x[n]),避免混淆;
- 角频率 ω 0 \omega_0 ω0 单位为 rad(离散)或 rad/s(连续),周期 T 0 T_0 T0(连续)单位为 s, N 0 N_0 N0(离散)为无量纲整数;
- 复指数信号中的幅度 ∣ C ∣ |C| ∣C∣、初相位 θ \theta θ 均为实数,确保物理意义明确(幅度非负,相位范围为 [ − π , π ] [-\pi, \pi] [−π,π])。
via:
- 信号的描述
https://www.eadianqi.com/zc/xinhaoyuxitong/4274.html - 信号的分类
https://www.eadianqi.com/zc/xinhaoyuxitong/4275.html - 信号的时移
https://www.eadianqi.com/zc/xinhaoyuxitong/4276.html - 信号的反射
https://www.eadianqi.com/zc/xinhaoyuxitong/4277.html - 信号的尺度变换
https://www.eadianqi.com/zc/xinhaoyuxitong/4278.html - 信号的奇偶分解
https://www.eadianqi.com/zc/xinhaoyuxitong/4279.html - 信号的加减运算
https://www.eadianqi.com/zc/xinhaoyuxitong/4280.html - 信号的相乘运算
https://www.eadianqi.com/zc/xinhaoyuxitong/4281.html - 信号的微分运算
https://www.eadianqi.com/zc/xinhaoyuxitong/4282.html - 信号的积分运算
https://www.eadianqi.com/zc/xinhaoyuxitong/4283.html - 连续指数信号与正弦信号
https://www.eadianqi.com/zc/xinhaoyuxitong/4284.html - 离散时间复指数信号与正弦信号
https://www.eadianqi.com/zc/xinhaoyuxitong/4285.html - 离散的单位脉冲信号与阶跃信号
https://www.eadianqi.com/zc/xinhaoyuxitong/4286.html

















 1020
1020

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









