




注:本文为 “微分方程” 相关合辑。
英文引文,机翻未校。
中文引文,略作重排。
如有内容异常,请看原文。
Definitions and important facts regarding ODEs and PDEs
常微分方程(ODE)和偏微分方程(PDE)的定义及重要事实
These definitions and facts are scattered here and there in the textbook. I’m collecting them all together in one place, to make it easier for you.
这些定义和事实分散在教材的各处,我将它们集中整理在一处,方便你查阅。
It is very important that you know what these words mean, since I will be using them without further explanations throughout the course. If you still have questions, ask me!
理解这些术语的含义至关重要,因为在整个课程中我会直接使用它们,不再额外解释。如果仍有疑问,随时向我提问!
Definitions
定义
-
O D E = ODE= ODE= ordinary differential equation: a differential equation whose unknown function depends on a single independent variable, eg u ( t ) → u(t) \to u(t)→ the equation only has derivatives with respect to t t t.
O D E = ODE= ODE= 常微分方程:未知函数仅依赖于一个自变量的微分方程,例如 u ( t ) → u(t) \to u(t)→ 方程中仅含对 t t t 的导数。 -
P D E = PDE= PDE= partial differential equation: a differential equation whose unknown function depends on two or more independent variables, eg u ( x , t ) → u(x, t) \to u(x,t)→ the equation has partial derivatives with respect to both t t t and x x x.
P D E = PDE= PDE= 偏微分方程:未知函数依赖于两个或多个自变量的微分方程,例如 u ( x , t ) → u(x, t) \to u(x,t)→ 方程中含对 t t t 和 x x x 的偏导数。 -
The order of an O D E / P D E ODE/PDE ODE/PDE: the highest derivative that appears in it.
O D E / P D E ODE/PDE ODE/PDE 的阶:方程中出现的最高阶导数。 -
An O D E / P D E ODE/PDE ODE/PDE is homogeneous if u = 0 u=0 u=0 is a solution of the O D E / P D E ODE/PDE ODE/PDE. An equation which is not homogeneous is said to be inhomogeneous.
若 u = 0 u=0 u=0 是 O D E / P D E ODE/PDE ODE/PDE 的解,则该方程为齐次方程;非齐次的方程称为非齐次方程。For example, d u d t + 3 u = 2 \frac{du}{dt} + 3u = 2 dtdu+3u=2 is inhomogeneous because u = 0 u=0 u=0 is not a valid solution.
例如, d u d t + 3 u = 2 \frac{du}{dt} + 3u = 2 dtdu+3u=2 是非齐次方程,因为 u = 0 u=0 u=0 不是它的有效解。 -
A boundary condition is homogeneous if u = 0 u=0 u=0 satisfies it. A boundary condition which is not homogeneous is said to be inhomogeneous.
若 u = 0 u=0 u=0 满足某边界条件,则该边界条件为齐次边界条件;非齐次的边界条件称为非齐次边界条件。For example, “ u ( x = 0 , t ) = 0 u(x=0, t)=0 u(x=0,t)=0 at all t t t” is homogeneous, but “ u ( x = 0 , t ) = 5 t u(x=0, t)=5t u(x=0,t)=5t at all t t t” is not homogeneous.
例如,“对所有 t t t, u ( x = 0 , t ) = 0 u(x=0, t)=0 u(x=0,t)=0” 是齐次边界条件,而 “对所有 t t t, u ( x = 0 , t ) = 5 t u(x=0, t)=5t u(x=0,t)=5t” 是非齐次边界条件。 -
A homogeneous O D E / P D E ODE/PDE ODE/PDE is linear: provided that for any u 1 u_1 u1 and u 2 u_2 u2 that are its solutions, then α u 1 + β u 2 \alpha u_1 + \beta u_2 αu1+βu2 is also a solution for any constants α , β \alpha, \beta α,β.
齐次 O D E / P D E ODE/PDE ODE/PDE 是线性的:若 u 1 u_1 u1 和 u 2 u_2 u2 是该方程的解,则对任意常数 α , β \alpha, \beta α,β, α u 1 + β u 2 \alpha u_1 + \beta u_2 αu1+βu2 也是其解。Note: sometimes we improperly refer to an inhomogeneous O D E / P D E ODE/PDE ODE/PDE as being linear – what is meant is that if we kept only the homogeneous part, that one is linear.
注:有时我们会不严谨地将非齐次 O D E / P D E ODE/PDE ODE/PDE 称为线性方程——实际指的是其齐次部分为线性方程。For example: d 2 u d t 2 + u d u d t + t u = 0 \frac{d^2u}{dt^2} + u\frac{du}{dt} + tu = 0 dt2d2u+udtdu+tu=0 is not linear. Why?
例如: d 2 u d t 2 + u d u d t + t u = 0 \frac{d^2u}{dt^2} + u\frac{du}{dt} + tu = 0 dt2d2u+udtdu+tu=0 是非线性方程。原因如下:Suppose that u 1 u_1 u1 and u 2 u_2 u2 are solutions, in other words,
假设 u 1 u_1 u1 和 u 2 u_2 u2 是该方程的解,即:d 2 u 1 d t 2 + u 1 d u 1 d t + t u 1 = 0 \frac{d^2u_1}{dt^2} + u_1\frac{du_1}{dt} + tu_1 = 0 dt2d2u1+u1dtdu1+tu1=0
d 2 u 2 d t 2 + u 2 d u 2 d t + t u 2 = 0 \frac{d^2u_2}{dt^2} + u_2\frac{du_2}{dt} + tu_2 = 0 dt2d2u2+u2dtdu2+tu2=0Let’s check if u = α u 1 + β u 2 u=\alpha u_1 + \beta u_2 u=αu1+βu2 satisfies the equation. Putting the terms in and grouping them, we find:
验证 u = α u 1 + β u 2 u=\alpha u_1 + \beta u_2 u=αu1+βu2 是否为解,代入方程并整理得:
(前两项括号内结果为0,但第三项通常不为0)It follows that u u u is not automatically a solution, so this is a non-linear equation. The problem comes from the term u d u d t u\frac{du}{dt} udtdu.
因此 u u u 并非必然是解,故该方程为非线性方程,问题出在 u d u d t u\frac{du}{dt} udtdu 这一项。After some thinking, you should agree that if all the terms in the O D E / P D E ODE/PDE ODE/PDE are either proportional to u u u or some derivative of u u u only, the equation is linear.
经分析可知,若 O D E / P D E ODE/PDE ODE/PDE 的所有项均仅与 u u u 或其某阶导数成正比,则该方程为线性方程。Any product of such terms, like u 2 u^2 u2, u d u d t u\frac{du}{dt} udtdu, ∂ u ∂ t ∂ u ∂ x \frac{\partial u}{\partial t}\frac{\partial u}{\partial x} ∂t∂u∂x∂u, … makes the equation non-linear.
任何此类项的乘积(如 u 2 u^2 u2、 u d u d t u\frac{du}{dt} udtdu、 ∂ u ∂ t ∂ u ∂ x \frac{\partial u}{\partial t}\frac{\partial u}{\partial x} ∂t∂u∂x∂u 等)都会使方程成为非线性方程。In this course we will study only linear O D E / P D E s ODE/PDEs ODE/PDEs, but you should remember that there’s a huge class of non-linear equations that we are not learning anything about in PHYS312 – and for which the techniques that we will learn in this course do not work, because all these methods are based on the fact that the equations are linear.
本课程仅研究线性 O D E / P D E ODE/PDE ODE/PDE,但需注意:PHYS312 课程不涉及大量非线性方程,且本课程所学方法对非线性方程无效(因这些方法均基于方程的线性性质)。 -
Suppose that u 1 ( t ) , . . . , u n ( t ) u_1(t), ..., u_n(t) u1(t),...,un(t) are solutions of a linear O D E ODE ODE. These solutions are said to be linearly independent if the equation c 1 u 1 ( t ) + . . . + c n u n ( t ) = 0 c_1u_1(t) + ... + c_nu_n(t) = 0 c1u1(t)+...+cnun(t)=0 is satisfied at all t t t if and only if c 1 = c 2 = . . . = c n = 0 c_1=c_2=...=c_n=0 c1=c2=...=cn=0.
设 u 1 ( t ) , . . . , u n ( t ) u_1(t), ..., u_n(t) u1(t),...,un(t) 是线性 O D E ODE ODE 的解,若对所有 t t t,方程 c 1 u 1 ( t ) + . . . + c n u n ( t ) = 0 c_1u_1(t) + ... + c_nu_n(t) = 0 c1u1(t)+...+cnun(t)=0 成立当且仅当 c 1 = c 2 = . . . = c n = 0 c_1=c_2=...=c_n=0 c1=c2=...=cn=0,则称这些解线性无关。
For example, take u 1 ( t ) = t u_1(t)=t u1(t)=t, u 2 ( t ) = e t u_2(t)=e^t u2(t)=et, u 3 ( t ) = 3 t u_3(t)=3t u3(t)=3t. Then, u 1 u_1 u1 and u 2 u_2 u2 are linearly independent (check!), but u 1 u_1 u1 and u 3 u_3 u3 are not.
例如,设 u 1 ( t ) = t u_1(t)=t u1(t)=t、 u 2 ( t ) = e t u_2(t)=e^t u2(t)=et、 u 3 ( t ) = 3 t u_3(t)=3t u3(t)=3t,则 u 1 u_1 u1 与 u 2 u_2 u2 线性无关(可自行验证),而 u 1 u_1 u1 与 u 3 u_3 u3 线性相关。The equation c 1 u 1 ( t ) + c 3 u 3 ( t ) = 0 c_1u_1(t) + c_3u_3(t) = 0 c1u1(t)+c3u3(t)=0 for all t t t has an infinite number of solutions c 1 + 3 c 3 = 0 c_1 + 3c_3 = 0 c1+3c3=0, eg c 1 = − 3 c_1=-3 c1=−3, c 3 = 1 c_3=1 c3=1, or c 1 = 1 c_1=1 c1=1, c 3 = − 1 / 3 c_3=-1/3 c3=−1/3 and so on and so forth.
对所有 t t t,方程 c 1 u 1 ( t ) + c 3 u 3 ( t ) = 0 c_1u_1(t) + c_3u_3(t) = 0 c1u1(t)+c3u3(t)=0 等价于 c 1 + 3 c 3 = 0 c_1 + 3c_3 = 0 c1+3c3=0,存在无穷多解(如 c 1 = − 3 c_1=-3 c1=−3、 c 3 = 1 c_3=1 c3=1 或 c 1 = 1 c_1=1 c1=1、 c 3 = − 1 / 3 c_3=-1/3 c3=−1/3 等)。
Very important facts about ODEs
关于 ODE 的重要事实
-
A linear O D E ODE ODE of order n n n has precisely n n n linearly independent solutions. There are many ways to choose these solutions, but we are certain that there cannot be more than n n n of them.
n n n 阶线性 O D E ODE ODE 恰好有 n n n 个线性无关的解,这些解的选取方式有多种,但最多只能有 n n n 个线性无关解。
-
If we know n n n linearly independent solutions u 1 ( t ) , . . . , u n ( t ) u_1(t), ..., u_n(t) u1(t),...,un(t) of a n t h n^{th} nth order linear homogeneous O D E ODE ODE, then the general solution of this O D E ODE ODE has the form:
若已知 n n n 阶线性齐次 O D E ODE ODE 的 n n n 个线性无关解 u 1 ( t ) , . . . , u n ( t ) u_1(t), ..., u_n(t) u1(t),...,un(t),则该方程的通解形式为:
u h ( t ) = ∑ k = 1 n c k u k ( t ) u_h(t) = \sum_{k=1}^n c_k u_k(t) uh(t)=∑k=1nckuk(t)(其中 c k c_k ck 为常数)To find a unique solution, we must be given an additional n n n conditions (generally known as initial conditions, if t t t is a time) which allow us to find the values of the constants c 1 , . . . , c n c_1, ..., c_n c1,...,cn.
要确定唯一解,需额外给出 n n n 个条件(若 t t t 为时间,则通常称为初始条件),用于求解常数 c 1 , . . . , c n c_1, ..., c_n c1,...,cn 的值。 -
The general solution of an inhomogeneous O D E ODE ODE has the general form:
非齐次 O D E ODE ODE 的通解形式为:
u ( t ) = u h ( t ) + u p ( t ) u(t) = u_h(t) + u_p(t) u(t)=uh(t)+up(t)where u h ( t ) u_h(t) uh(t) is the GENERAL solution of the homogeneous equation (and according to fact 2, is given by a linear combination u h ( t ) = ∑ k = 1 n c k u k ( t ) u_h(t) = \sum_{k=1}^n c_k u_k(t) uh(t)=∑k=1nckuk(t)) and u p ( t ) u_p(t) up(t) is ANY particular solution of the inhomogeneous equation.
其中 u h ( t ) u_h(t) uh(t) 是对应齐次方程的通解(根据事实2,为线性组合 u h ( t ) = ∑ k = 1 n c k u k ( t ) u_h(t) = \sum_{k=1}^n c_k u_k(t) uh(t)=∑k=1nckuk(t)), u p ( t ) u_p(t) up(t) 是非齐次方程的任意一个特解。We will discuss elsewhere and practice in class how to find u p ( t ) u_p(t) up(t).
关于 u p ( t ) u_p(t) up(t) 的求解方法,将在其他章节讨论并在课堂上练习。Note: different textbooks have different names for these components (eg, our textbook uses u c ( t ) u_c(t) uc(t) instead of u h ( t ) u_h(t) uh(t)).
注:不同教材对这些分量的命名不同(例如,本教材用 u c ( t ) u_c(t) uc(t) 表示 u h ( t ) u_h(t) uh(t))。I will use u h u_h uh throughout the course to remind you that it is for the homogeneous part, and u p u_p up to remind that this is a particular solution of the inhomogeneous O D E ODE ODE.
本课程中我将始终使用 u h u_h uh(提醒其对应齐次部分)和 u p u_p up(提醒其是非齐次方程的特解)。
高等数学学习笔记 ——微分方程解法公式
野指针小李 原创于 2020-11-22 14:28:11 发布
本文列举微分方程的相关公式,作为学习笔记以备后续查阅。
本文旨在为模型求解中涉及的微分方程提供参考,不针对考研或本科课程应试,故不包含例题,仅呈现对应解法。
公式与解法暂不完整,后续将根据需求补充。
1 微分方程基础
微分的核心是变化率,例如速度 v = d x d t v = \frac{dx}{dt} v=dtdx(描述每一时刻距离的变化)、加速度 a = d v d t a = \frac{dv}{dt} a=dtdv(描述每一时刻速度的变化)。
微分方程是由变化率构成的方程,其适用场景为:当描述变量间的相对变化比描述绝对量更简便时。
1.1 微分方程的分类
按自变量数量分类
- 常微分方程(Ordinary Differential Equations, ODE):未知函数仅含一个自变量,例如 y ′ ( x ) = p ( x ) y + q ( x ) y'(x) = p(x)y + q(x) y′(x)=p(x)y+q(x)。
- 偏微分方程(Partial Differential Equations, PDE):未知函数含多个自变量,例如 ∂ T ∂ t ( x , y , t ) = ∂ 2 T ∂ x 2 ( x , y , t ) + ∂ 2 T ∂ y 2 ( x , y , t ) \frac{\partial T}{\partial t}(x,y,t) = \frac{\partial^2 T}{\partial x^2}(x,y,t) + \frac{\partial^2 T}{\partial y^2}(x,y,t) ∂t∂T(x,y,t)=∂x2∂2T(x,y,t)+∂y2∂2T(x,y,t)。
按导数阶数分类
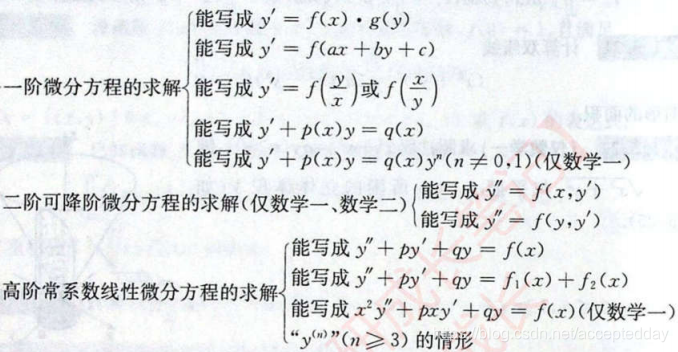
微分方程可分为一阶方程与高阶方程,其具体分类及对应解法如下图所示:

2 一阶微分方程
2.1 一阶线性微分方程
标准形式
y ′ + p ( x ) y = q ( x ) y' + p(x)y = q(x) y′+p(x)y=q(x)
分类
- 若 q ( x ) = 0 q(x) = 0 q(x)=0,则方程为一阶线性齐次微分方程;
- 若 q ( x ) ≠ 0 q(x) \neq 0 q(x)=0,则方程为一阶线性非齐次微分方程。
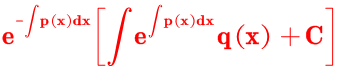
通解公式
y
=
e
−
∫
p
(
x
)
d
x
[
∫
q
(
x
)
e
∫
p
(
x
)
d
x
d
x
+
C
]
y = e^{-\int p(x)dx} \left[ \int q(x)e^{\int p(x)dx}dx + C \right]
y=e−∫p(x)dx[∫q(x)e∫p(x)dxdx+C]
(其中
C
C
C 为任意常数,下同)
2.2 变量可分离微分方程
标准形式
∫ g ( y ) d y = ∫ f ( x ) d x \int g(y)dy = \int f(x)dx ∫g(y)dy=∫f(x)dx
解法步骤
由
d
y
d
x
=
g
(
y
)
f
(
x
)
\frac{dy}{dx} = \frac{g(y)}{f(x)}
dxdy=f(x)g(y),通过变量分离得
g
(
y
)
d
y
=
f
(
x
)
d
x
g(y)dy = f(x)dx
g(y)dy=f(x)dx,两端分别积分:
∫
g
(
y
)
d
y
=
∫
f
(
x
)
d
x
+
C
\int g(y)dy = \int f(x)dx + C
∫g(y)dy=∫f(x)dx+C
记
G
(
y
)
=
∫
g
(
y
)
d
y
G(y) = \int g(y)dy
G(y)=∫g(y)dy、
F
(
x
)
=
∫
f
(
x
)
d
x
F(x) = \int f(x)dx
F(x)=∫f(x)dx,则通解为
G
(
y
)
=
F
(
x
)
+
C
G(y) = F(x) + C
G(y)=F(x)+C。
2.3 齐次微分方程
标准形式
d y d x = f ( y x ) \frac{dy}{dx} = f\left( \frac{y}{x} \right) dxdy=f(xy)
解法步骤
- 变量代换:令 u = y x u = \frac{y}{x} u=xy(即 y = u x y = ux y=ux),对 x x x 求导得 d y d x = u + x d u d x \frac{dy}{dx} = u + x\frac{du}{dx} dxdy=u+xdxdu;
- 代入原方程:将 d y d x = u + x d u d x \frac{dy}{dx} = u + x\frac{du}{dx} dxdy=u+xdxdu 代入 d y d x = f ( y x ) \frac{dy}{dx} = f\left( \frac{y}{x} \right) dxdy=f(xy),得 u + x d u d x = f ( u ) u + x\frac{du}{dx} = f(u) u+xdxdu=f(u);
- 求解变量可分离方程:整理得 d u f ( u ) − u = d x x \frac{du}{f(u) - u} = \frac{dx}{x} f(u)−udu=xdx,两端积分后回代 u = y x u = \frac{y}{x} u=xy,即得原方程通解。
2.4 伯努利方程
标准形式
y ′ + p ( x ) y = q ( x ) y n ( n ≠ 0 , 1 ) y' + p(x)y = q(x)y^n \quad (n \neq 0,1) y′+p(x)y=q(x)yn(n=0,1)
解法步骤
- 变量变换预处理:方程两端同除以 y n y^n yn,得 y − n y ′ + p ( x ) y 1 − n = q ( x ) y^{-n}y' + p(x)y^{1-n} = q(x) y−ny′+p(x)y1−n=q(x);
- 变量代换:令 u = y 1 − n u = y^{1-n} u=y1−n,对 x x x 求导得 d u d x = ( 1 − n ) y − n y ′ \frac{du}{dx} = (1 - n)y^{-n}y' dxdu=(1−n)y−ny′,即 y − n y ′ = 1 1 − n d u d x y^{-n}y' = \frac{1}{1 - n}\frac{du}{dx} y−ny′=1−n1dxdu;
- 转化为一阶线性方程:将
y
−
n
y
′
=
1
1
−
n
d
u
d
x
y^{-n}y' = \frac{1}{1 - n}\frac{du}{dx}
y−ny′=1−n1dxdu 代入步骤1的方程,得:
1 1 − n d u d x + p ( x ) u = q ( x ) \frac{1}{1 - n}\frac{du}{dx} + p(x)u = q(x) 1−n1dxdu+p(x)u=q(x)
整理为一阶线性微分方程标准形式 d u d x + ( 1 − n ) p ( x ) u = ( 1 − n ) q ( x ) \frac{du}{dx} + (1 - n)p(x)u = (1 - n)q(x) dxdu+(1−n)p(x)u=(1−n)q(x); - 求解并回代:利用一阶线性微分方程通解公式求解 u u u,再回代 u = y 1 − n u = y^{1-n} u=y1−n,即得原方程通解。
2.5 全微分方程
标准形式
P
(
x
,
y
)
d
x
+
Q
(
x
,
y
)
d
y
=
0
P(x,y)dx + Q(x,y)dy = 0
P(x,y)dx+Q(x,y)dy=0
其中
P
(
x
,
y
)
P(x,y)
P(x,y)、
Q
(
x
,
y
)
Q(x,y)
Q(x,y) 为连续函数,且满足
∂
P
∂
y
=
∂
Q
∂
x
\frac{\partial P}{\partial y} = \frac{\partial Q}{\partial x}
∂y∂P=∂x∂Q(全微分方程的充要条件)。
解法
-
线积分法:取定点 ( x 0 , y 0 ) (x_0,y_0) (x0,y0),则原方程的通解为:
Φ ( x , y ) = ∫ x 0 x P ( x , y ) d x + ∫ y 0 y Q ( x 0 , y ) d y = C \Phi(x,y) = \int_{x_0}^x P(x,y)dx + \int_{y_0}^y Q(x_0,y)dy = C Φ(x,y)=∫x0xP(x,y)dx+∫y0yQ(x0,y)dy=C
或
Φ ( x , y ) = ∫ ( x 0 , y 0 ) ( x , y ) P ( x , y ) d x + Q ( x , y ) d y = C \Phi(x,y) = \int_{(x_0,y_0)}^{(x,y)} P(x,y)dx + Q(x,y)dy = C Φ(x,y)=∫(x0,y0)(x,y)P(x,y)dx+Q(x,y)dy=C
(其中 Φ ( x , y ) \Phi(x,y) Φ(x,y) 为 P ( x , y ) d x + Q ( x , y ) d y P(x,y)dx + Q(x,y)dy P(x,y)dx+Q(x,y)dy 的原函数) -
偏积分法:由 ∂ Φ ∂ x = P ( x , y ) \frac{\partial \Phi}{\partial x} = P(x,y) ∂x∂Φ=P(x,y),对 x x x 积分得 Φ ( x , y ) = ∫ P ( x , y ) d x + ψ ( y ) \Phi(x,y) = \int P(x,y)dx + \psi(y) Φ(x,y)=∫P(x,y)dx+ψ(y)( ψ ( y ) \psi(y) ψ(y) 为关于 y y y 的待定函数);将其代入 ∂ Φ ∂ y = Q ( x , y ) \frac{\partial \Phi}{\partial y} = Q(x,y) ∂y∂Φ=Q(x,y),求解 ψ ( y ) \psi(y) ψ(y) 后即得 Φ ( x , y ) \Phi(x,y) Φ(x,y),通解为 Φ ( x , y ) = C \Phi(x,y) = C Φ(x,y)=C。
-
凑微分法:通过代数变形将 P ( x , y ) d x + Q ( x , y ) d y P(x,y)dx + Q(x,y)dy P(x,y)dx+Q(x,y)dy 凑为某个函数 Φ ( x , y ) \Phi(x,y) Φ(x,y) 的全微分 d Φ ( x , y ) d\Phi(x,y) dΦ(x,y),通解为 Φ ( x , y ) = C \Phi(x,y) = C Φ(x,y)=C。
3 高阶微分方程
3.1 可降阶的高阶微分方程
3.1.1 型如 y ′ ′ = f ( x , y ′ ) y'' = f(x, y') y′′=f(x,y′) 的方程(不显含未知函数 y y y)
解法步骤
- 变量代换:令 y ′ = P ( x ) y' = P(x) y′=P(x),则 y ′ ′ = d P d x y'' = \frac{dP}{dx} y′′=dxdP;
- 转化为一阶方程:将 y ′ = P ( x ) y' = P(x) y′=P(x)、 y ′ ′ = d P d x y'' = \frac{dP}{dx} y′′=dxdP 代入原方程,得 d P d x = f ( x , P ) \frac{dP}{dx} = f(x, P) dxdP=f(x,P);
- 求解并回代:求解一阶方程
d
P
d
x
=
f
(
x
,
P
)
\frac{dP}{dx} = f(x, P)
dxdP=f(x,P) 得
P
=
φ
(
x
,
C
1
)
P = \varphi(x, C_1)
P=φ(x,C1),再由
y
′
=
P
=
φ
(
x
,
C
1
)
y' = P = \varphi(x, C_1)
y′=P=φ(x,C1) 积分得通解:
y = ∫ φ ( x , C 1 ) d x + C 2 y = \int \varphi(x, C_1)dx + C_2 y=∫φ(x,C1)dx+C2
3.1.2 型如 y ′ ′ = f ( y , y ′ ) y'' = f(y, y') y′′=f(y,y′) 的方程(不显含自变量 x x x)
解法步骤
- 变量代换:令 y ′ = P ( y ) y' = P(y) y′=P(y),则 y ′ ′ = d P d y ⋅ d y d x = P ⋅ d P d y y'' = \frac{dP}{dy} \cdot \frac{dy}{dx} = P \cdot \frac{dP}{dy} y′′=dydP⋅dxdy=P⋅dydP(复合函数求导法则);
- 转化为一阶方程:将 y ′ ′ = P ⋅ d P d y y'' = P \cdot \frac{dP}{dy} y′′=P⋅dydP 代入原方程,得 P ⋅ d P d y = f ( y , P ) P \cdot \frac{dP}{dy} = f(y, P) P⋅dydP=f(y,P);
- 求解并回代:求解一阶方程
P
⋅
d
P
d
y
=
f
(
y
,
P
)
P \cdot \frac{dP}{dy} = f(y, P)
P⋅dydP=f(y,P) 得
P
=
ψ
(
y
,
C
1
)
P = \psi(y, C_1)
P=ψ(y,C1),再由
d
y
d
x
=
P
=
ψ
(
y
,
C
1
)
\frac{dy}{dx} = P = \psi(y, C_1)
dxdy=P=ψ(y,C1) 分离变量并积分得通解:
∫ d y ψ ( y , C 1 ) = x + C 2 \int \frac{dy}{\psi(y, C_1)} = x + C_2 ∫ψ(y,C1)dy=x+C2
3.2 高阶常系数线性微分方程
标准形式
a
n
d
n
y
d
x
n
+
a
n
−
1
d
n
−
1
y
d
x
n
−
1
+
⋯
+
a
1
d
y
d
x
+
a
0
y
=
f
(
x
)
a_n \frac{d^n y}{dx^n} + a_{n-1} \frac{d^{n-1} y}{dx^{n-1}} + \dots + a_1 \frac{dy}{dx} + a_0 y = f(x)
andxndny+an−1dxn−1dn−1y+⋯+a1dxdy+a0y=f(x)
其中
a
n
,
a
n
−
1
,
…
,
a
0
a_n, a_{n-1}, \dots, a_0
an,an−1,…,a0 为常数,且
a
n
≠
0
a_n \neq 0
an=0。
分类
- 若 f ( x ) = 0 f(x) = 0 f(x)=0,则方程为高阶常系数线性齐次微分方程;
- 若 f ( x ) ≠ 0 f(x) \neq 0 f(x)=0,则方程为高阶常系数线性非齐次微分方程。
3.2.1 高阶常系数线性齐次微分方程
解的结构
若
y
1
(
x
)
,
y
2
(
x
)
,
…
,
y
n
(
x
)
y_1(x), y_2(x), \dots, y_n(x)
y1(x),y2(x),…,yn(x) 是方程的
n
n
n 个线性无关的特解,则其通解为:
y
=
C
1
y
1
(
x
)
+
C
2
y
2
(
x
)
+
⋯
+
C
n
y
n
(
x
)
y = C_1 y_1(x) + C_2 y_2(x) + \dots + C_n y_n(x)
y=C1y1(x)+C2y2(x)+⋯+Cnyn(x)
解法(特征方程法)
- 构造特征方程:对于齐次方程
a
n
y
(
n
)
+
a
n
−
1
y
(
n
−
1
)
+
⋯
+
a
1
y
′
+
a
0
y
=
0
a_n y^{(n)} + a_{n-1} y^{(n-1)} + \dots + a_1 y' + a_0 y = 0
any(n)+an−1y(n−1)+⋯+a1y′+a0y=0,其特征方程为:
a n λ n + a n − 1 λ n − 1 + ⋯ + a 1 λ + a 0 = 0 a_n \lambda^n + a_{n-1} \lambda^{n-1} + \dots + a_1 \lambda + a_0 = 0 anλn+an−1λn−1+⋯+a1λ+a0=0 - 根据特征根形式确定特解:
- 单实根 λ \lambda λ:对应特解 e λ x e^{\lambda x} eλx;
- k k k 重实根 λ \lambda λ:对应 k k k 个线性无关的特解 e λ x , x e λ x , … , x k − 1 e λ x e^{\lambda x}, x e^{\lambda x}, \dots, x^{k-1} e^{\lambda x} eλx,xeλx,…,xk−1eλx;
- 一对共轭复根 λ = α ± i β \lambda = \alpha \pm i\beta λ=α±iβ:对应两个线性无关的特解 e α x cos β x , e α x sin β x e^{\alpha x} \cos\beta x, e^{\alpha x} \sin\beta x eαxcosβx,eαxsinβx;
- 一对 k k k 重共轭复根 λ = α ± i β \lambda = \alpha \pm i\beta λ=α±iβ:对应 2 k 2k 2k 个线性无关的特解 e α x cos β x , x e α x cos β x , … , x k − 1 e α x cos β x e^{\alpha x} \cos\beta x, x e^{\alpha x} \cos\beta x, \dots, x^{k-1} e^{\alpha x} \cos\beta x eαxcosβx,xeαxcosβx,…,xk−1eαxcosβx 与 e α x sin β x , x e α x sin β x , … , x k − 1 e α x sin β x e^{\alpha x} \sin\beta x, x e^{\alpha x} \sin\beta x, \dots, x^{k-1} e^{\alpha x} \sin\beta x eαxsinβx,xeαxsinβx,…,xk−1eαxsinβx;
- 组合特解得通解:将所有特征根对应的线性无关特解按解的结构组合,即得齐次方程通解。
3.2.2 高阶常系数线性非齐次微分方程(补充内容)
解的结构
非齐次方程的通解 = 对应齐次方程的通解 + 非齐次方程的一个特解(记为
y
∗
y^*
y∗),即:
y
=
Y
+
y
∗
y = Y + y^*
y=Y+y∗
(其中
Y
Y
Y 为对应齐次方程的通解)
特解 y ∗ y^* y∗ 的求法(待定系数法)
根据非齐次项 f ( x ) f(x) f(x) 的形式设定特解形式,代入原方程确定系数:
- 若
f
(
x
)
=
e
λ
x
P
m
(
x
)
f(x) = e^{\lambda x} P_m(x)
f(x)=eλxPm(x)(
P
m
(
x
)
P_m(x)
Pm(x) 为
m
m
m 次多项式):
- 当 λ \lambda λ 不是特征根时,设 y ∗ = e λ x Q m ( x ) y^* = e^{\lambda x} Q_m(x) y∗=eλxQm(x)( Q m ( x ) Q_m(x) Qm(x) 为 m m m 次待定多项式);
- 当 λ \lambda λ 是 k k k 重特征根时,设 y ∗ = x k e λ x Q m ( x ) y^* = x^k e^{\lambda x} Q_m(x) y∗=xkeλxQm(x);
- 若
f
(
x
)
=
e
α
x
[
P
l
(
x
)
cos
β
x
+
Q
n
(
x
)
sin
β
x
]
f(x) = e^{\alpha x} [P_l(x) \cos\beta x + Q_n(x) \sin\beta x]
f(x)=eαx[Pl(x)cosβx+Qn(x)sinβx](
P
l
(
x
)
P_l(x)
Pl(x) 为
l
l
l 次多项式,
Q
n
(
x
)
Q_n(x)
Qn(x) 为
n
n
n 次多项式):
- 当 α ± i β \alpha \pm i\beta α±iβ 不是特征根时,设 y ∗ = e α x [ R m ( x ) cos β x + S m ( x ) sin β x ] y^* = e^{\alpha x} [R_m(x) \cos\beta x + S_m(x) \sin\beta x] y∗=eαx[Rm(x)cosβx+Sm(x)sinβx]( m = max { l , n } m = \max\{l,n\} m=max{l,n}, R m ( x ) , S m ( x ) R_m(x), S_m(x) Rm(x),Sm(x) 为 m m m 次待定多项式);
- 当 α ± i β \alpha \pm i\beta α±iβ 是 k k k 重特征根时,设 y ∗ = x k e α x [ R m ( x ) cos β x + S m ( x ) sin β x ] y^* = x^k e^{\alpha x} [R_m(x) \cos\beta x + S_m(x) \sin\beta x] y∗=xkeαx[Rm(x)cosβx+Sm(x)sinβx]。
微分方程的求解方法
Super__Tiger 于 2020-12-13 09:21:34 发布
前言
本文系统梳理考研数学范围内微分方程的常见类型及对应求解方法,内容参考张宇《闭关修炼》,旨在为学习者提供条理清晰的知识框架与解题指导。
Ⅰ. 微分方程的基本概念
1.1 阶数的定义
- 微分方程的阶数由方程中含有的导数或微分的最高阶数确定。仅含一阶导数或微分的微分方程称为一阶微分方程。
- 示例:方程 y ′ ′ + x y = y sin x y'' + x y = y \sin x y′′+xy=ysinx 中最高阶导数为二阶导数 y ′ ′ y'' y′′,因此该方程为二阶微分方程。
1.2 线性的定义
- 线性微分方程的标准形式为 y ′ + p ( x ) y + q ( x ) = 0 y' + p(x) y + q(x) = 0 y′+p(x)y+q(x)=0,其特征是:方程简化后,每一项中未知函数 y y y 及其各阶导数的指数均为 1。
- 说明:线性性质仅针对未知函数 y y y 及其导数,对自变量 x x x 无限制;系数 p ( x ) p(x) p(x) 和 q ( x ) q(x) q(x) 可为任意关于 x x x 的函数。
- 非线示例: ( y ′ ) 2 + p ( x ) y + q ( x ) = 0 (y')^2 + p(x) y + q(x) = 0 (y′)2+p(x)y+q(x)=0(含 y ′ y' y′ 的二次项)、 y ′ + p ( x ) y 2 + q ( x ) = 0 y' + p(x) y^2 + q(x) = 0 y′+p(x)y2+q(x)=0(含 y y y 的二次项)均不属于线性方程。
1.3 齐次线性方程的定义
- 对于线性微分方程,若方程中不含有未知数的常数项(即常数项为 0),则称该方程为齐次线性方程。
1.4 齐次微分方程的定义
- 齐次微分方程的标准形式为 y ′ = f ( y x ) y' = f\left( \frac{y}{x} \right) y′=f(xy),其中 f f f 为已知连续函数。
- 特性:通过变量替换可转化为可分离变量方程,其本质是方程右端表达式仅以 y x \frac{y}{x} xy 为自变量构成复合函数。
1.5 一阶线性微分方程的定义

1.6 二阶常系数线性微分方程的定义
- 二阶常系数线性微分方程的标准形式为 y ′ ′ + p y ′ + q y = f ( x ) y'' + p y' + q y = f(x) y′′+py′+qy=f(x),其中 p p p、 q q q 为实常数, f ( x ) f(x) f(x) 为已知函数。
Ⅱ. 考研范围内的微分方程分类
考研数学中,微分方程的求解主要涵盖以下三类:
- 一阶微分方程的求解
- 二阶可降阶微分方程的求解
- 高阶常系数线性微分方程的求解
Ⅲ. 微分方程的求解方法
3.1 一阶微分方程的求解
3.1.1 可分离变量型方程的解法
可分离变量型方程分为两种典型形式,求解关键为通过代数变形将变量分离,再分别积分。
(1)标准形式 y ′ = f ( x ) ⋅ g ( y ) y' = f(x) \cdot g(y) y′=f(x)⋅g(y)
- 求解步骤:将方程变形为变量分离形式,即 d y g ( y ) = f ( x ) d x \frac{dy}{g(y)} = f(x) dx g(y)dy=f(x)dx(要求 g ( y ) ≠ 0 g(y) \neq 0 g(y)=0),对等式两端分别积分 ∫ d y g ( y ) = ∫ f ( x ) d x + C \int \frac{dy}{g(y)} = \int f(x) dx + C ∫g(y)dy=∫f(x)dx+C,其中 C C C 为积分常数,最终得到方程的通解。

解析:

(2)形式 y ′ = f ( a x + b y + c ) y' = f(a x + b y + c) y′=f(ax+by+c)( a a a、 b b b 不同时为 0)
- 求解步骤:令 u = a x + b y + c u = a x + b y + c u=ax+by+c,对 x x x 求导得 u ′ = a + b y ′ u' = a + b y' u′=a+by′,代入原方程整理得 u ′ = a + b f ( u ) u' = a + b f(u) u′=a+bf(u),此时方程转化为可分离变量形式 d u a + b f ( u ) = d x \frac{du}{a + b f(u)} = dx a+bf(u)du=dx,积分后回代 u = a x + b y + c u = a x + b y + c u=ax+by+c 即可得到通解。

解析:
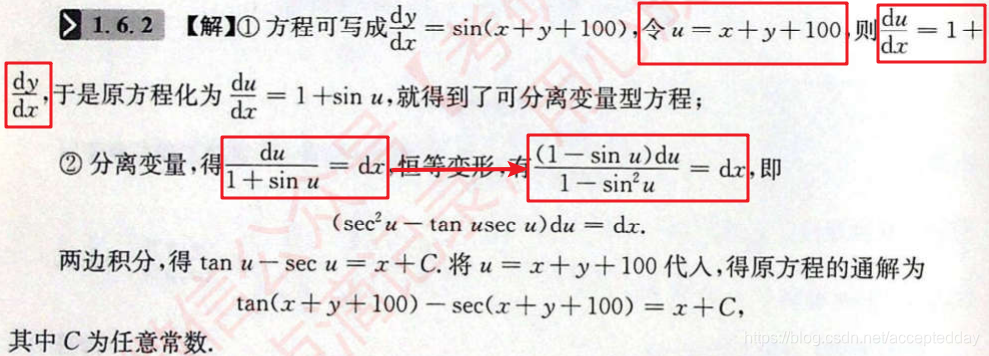
- 注意事项:
- 变量替换后的导数关系: d u d x = a + b d y d x \frac{du}{dx} = a + b \frac{dy}{dx} dxdu=a+bdxdy,需准确推导避免出错;
- 积分 ∫ 1 1 + sin u d u \int \frac{1}{1 + \sin u} du ∫1+sinu1du 的化简技巧:可通过分子分母同乘 1 − sin u 1 - \sin u 1−sinu 转化为 ∫ 1 − sin u cos 2 u d u = ∫ ( sec 2 u − sec u tan u ) d u \int \frac{1 - \sin u}{\cos^2 u} du = \int (\sec^2 u - \sec u \tan u) du ∫cos2u1−sinudu=∫(sec2u−secutanu)du,再利用基本积分公式求解。
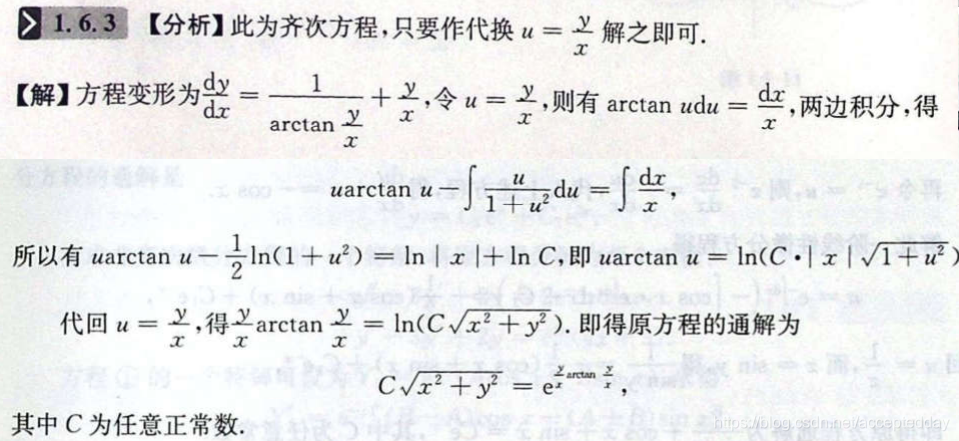
3.1.2 齐次型方程的解法
- 标准形式: y ′ = f ( y x ) y' = f\left( \frac{y}{x} \right) y′=f(xy) 或 y ′ = f ( x y ) y' = f\left( \frac{x}{y} \right) y′=f(yx)
- 求解步骤:
- 变量替换:令 u = y x u = \frac{y}{x} u=xy(或 u = x y u = \frac{x}{y} u=yx),则 y = u x y = u x y=ux(或 x = u y x = u y x=uy),对 x x x 求导得 y ′ = u + x d u d x y' = u + x \frac{du}{dx} y′=u+xdxdu(或相应导数关系);
- 代入化简:将 y ′ y' y′ 代入原方程,消去 y y y 得到关于 u u u 和 x x x 的可分离变量方程;
- 积分求解:分离变量后积分,再回代 u = y x u = \frac{y}{x} u=xy(或 u = x y u = \frac{x}{y} u=yx),得到原方程的通解。

解析:
3.1.3 一阶线性型方程的解法(重难点)
一阶线性微分方程分为标准形式和伯努利方程(数学一专属),解法为公式法,需准确掌握方程形式判定与变量替换技巧。
A. 标准形式: y ′ + p ( x ) y = q ( x ) y' + p(x) y = q(x) y′+p(x)y=q(x)
(1)方程形式判定步骤
- 整理方程项:将方程中所有含 y y y、 y ′ y' y′ 的项移至左端,含 x x x 的非齐次项移至右端;
- 标准化变形:将方程化为 y ′ + p ( x ) y = q ( x ) y' + p(x) y = q(x) y′+p(x)y=q(x) 的标准形式,确保 y ′ y' y′ 的系数为 1;
- 验证线性性:确认方程中 y y y 和 y ′ y' y′ 的指数均为 1,且不含 y y y 与 y ′ y' y′ 的乘积项或高次项。
(2)通解公式
对于标准形式
y
′
+
p
(
x
)
y
=
q
(
x
)
y' + p(x) y = q(x)
y′+p(x)y=q(x),其通解为:
y
=
e
−
∫
p
(
x
)
d
x
(
∫
q
(
x
)
e
∫
p
(
x
)
d
x
d
x
+
C
)
y = e^{-\int p(x) dx} \left( \int q(x) e^{\int p(x) dx} dx + C \right)
y=e−∫p(x)dx(∫q(x)e∫p(x)dxdx+C)
其中
C
C
C 为积分常数,积分过程中无需考虑常数项(已包含在
C
C
C 中)。

解析:

- 注意事项:对于本题中涉及的 x 2 = 1 x^2 = 1 x2=1 相关讨论,因初始条件 y ( 0 ) = 1 y(0) = 1 y(0)=1 限定了求解区间包含 x = 0 x = 0 x=0,而 x = 1 x = 1 x=1 和 x = − 1 x = -1 x=−1 为孤立点,其对应的 y y y 取值不影响初始条件下特解的存在性与唯一性,故无需额外讨论。
B. 伯努利方程(数学一专属)
- 标准形式: y ′ + p ( x ) y = q ( x ) y n y' + p(x) y = q(x) y^n y′+p(x)y=q(x)yn(其中 n ≠ 0 , 1 n \neq 0, 1 n=0,1)
- 求解:通过变量替换转化为一阶线性微分方程,再利用公式法求解。
(1)变量替换步骤
令
z
=
y
1
−
n
z = y^{1 - n}
z=y1−n,对
x
x
x 求导得:
d
z
d
x
=
(
1
−
n
)
y
−
n
d
y
d
x
\frac{dz}{dx} = (1 - n) y^{-n} \frac{dy}{dx}
dxdz=(1−n)y−ndxdy
将原方程两边同乘
(
1
−
n
)
y
−
n
(1 - n) y^{-n}
(1−n)y−n,代入
d
z
d
x
\frac{dz}{dx}
dxdz 的表达式,化简得到一阶线性方程:
d
z
d
x
+
(
1
−
n
)
p
(
x
)
z
=
(
1
−
n
)
q
(
x
)
\frac{dz}{dx} + (1 - n) p(x) z = (1 - n) q(x)
dxdz+(1−n)p(x)z=(1−n)q(x)

(2)求解步骤
- 对转化后的一阶线性方程,利用通解公式求出 z z z 关于 x x x 的表达式;
- 回代 z = y 1 − n z = y^{1 - n} z=y1−n,得到原伯努利方程的通解。

解析:

- 注意事项:本题中对 sin y \sin y siny 进行换元的依据是:观察到方程左端含 cos y ⋅ y ′ \cos y \cdot y' cosy⋅y′,而 ( sin y ) ′ = cos y ⋅ y ′ (\sin y)' = \cos y \cdot y' (siny)′=cosy⋅y′,方程右端含 sin y \sin y siny 项,通过令 z = sin y z = \sin y z=siny 可将方程转化为关于 z z z 的一阶线性方程,简化求解过程。
3.2 二阶可降阶微分方程的求解
二阶可降阶微分方程的求解思路是通过变量替换降低方程阶数,转化为一阶微分方程后求解,根据方程缺项情况分为两类。
3.2.1 缺 y y y 型: y ′ ′ = f ( x , y ′ ) y'' = f(x, y') y′′=f(x,y′)
- 变量替换:令 y ′ = p ( x ) y' = p(x) y′=p(x),则 y ′ ′ = d p d x y'' = \frac{dp}{dx} y′′=dxdp;
- 求解步骤:将 y ′ = p y' = p y′=p、 y ′ ′ = d p d x y'' = \frac{dp}{dx} y′′=dxdp 代入原方程,得到关于 p p p 和 x x x 的一阶微分方程 d p d x = f ( x , p ) \frac{dp}{dx} = f(x, p) dxdp=f(x,p),求解该方程得到 p = φ ( x , C 1 ) p = \varphi(x, C_1) p=φ(x,C1)( C 1 C_1 C1 为积分常数),再通过 y = ∫ φ ( x , C 1 ) d x + C 2 y = \int \varphi(x, C_1) dx + C_2 y=∫φ(x,C1)dx+C2( C 2 C_2 C2 为积分常数)得到原方程的通解。

解析:
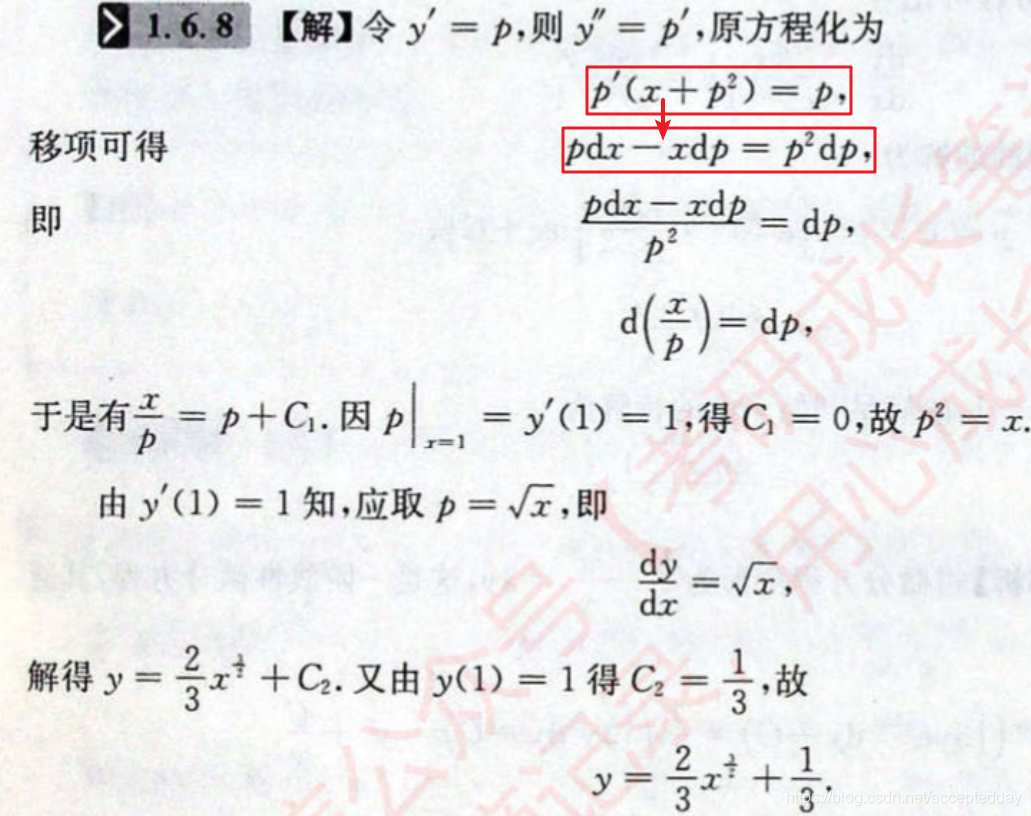
- 注意事项:对于方程 p ′ ( x + p 2 ) = p p'(x + p^2) = p p′(x+p2)=p,其形式不满足一阶线性或齐次方程特征,分离变量难度较大,因此采用整体代换技巧:将方程变形为 p d x − x d p = p 2 d p p dx - x dp = p^2 dp pdx−xdp=p2dp,两边同除以 p 2 p^2 p2 得 p d x − x d p p 2 = d p \frac{p dx - x dp}{p^2} = dp p2pdx−xdp=dp,利用微分公式 d ( x p ) = p d x − x d p p 2 d\left( \frac{x}{p} \right) = \frac{p dx - x dp}{p^2} d(px)=p2pdx−xdp,化简为 d ( x p ) = d p d\left( \frac{x}{p} \right) = dp d(px)=dp,再积分求解。
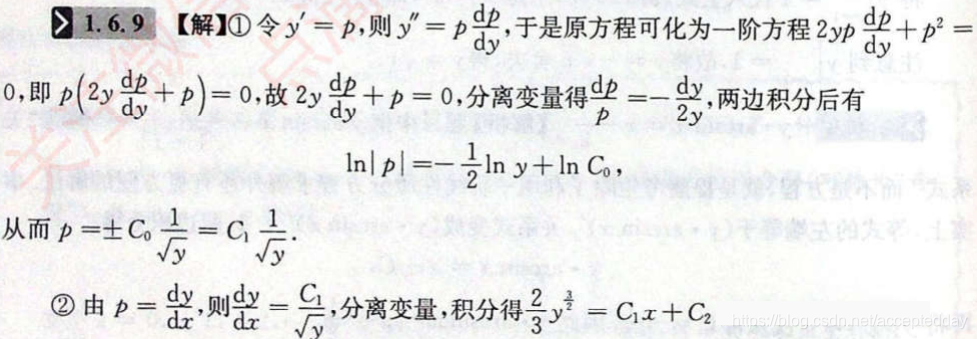
3.2.2 缺 x x x 型: y ′ ′ = f ( y , y ′ ) y'' = f(y, y') y′′=f(y,y′)
- 变量替换:令 y ′ = p ( y ) y' = p(y) y′=p(y),则 y ′ ′ = d p d y ⋅ d y d x = p ⋅ d p d y y'' = \frac{dp}{dy} \cdot \frac{dy}{dx} = p \cdot \frac{dp}{dy} y′′=dydp⋅dxdy=p⋅dydp(利用复合函数求导法则);
- 求解步骤:将 y ′ = p y' = p y′=p、 y ′ ′ = p ⋅ d p d y y'' = p \cdot \frac{dp}{dy} y′′=p⋅dydp 代入原方程,得到关于 p p p 和 y y y 的一阶微分方程 p ⋅ d p d y = f ( y , p ) p \cdot \frac{dp}{dy} = f(y, p) p⋅dydp=f(y,p),求解该方程得到 p = ψ ( y , C 1 ) p = \psi(y, C_1) p=ψ(y,C1)( C 1 C_1 C1 为积分常数),再通过分离变量 d y ψ ( y , C 1 ) = d x \frac{dy}{\psi(y, C_1)} = dx ψ(y,C1)dy=dx,积分得 ∫ d y ψ ( y , C 1 ) = x + C 2 \int \frac{dy}{\psi(y, C_1)} = x + C_2 ∫ψ(y,C1)dy=x+C2( C 2 C_2 C2 为积分常数),即原方程的通解。

解析:
3.3 高阶常系数线性微分方程的求解
考研范围内重点考察二阶常系数线性微分方程,高阶方程求解思路与二阶一致,均为“齐次方程通解 + 非齐次方程特解”的叠加形式。
3.3.1 标准形式 y ′ ′ + p y ′ + q y = f ( x ) y'' + p y' + q y = f(x) y′′+py′+qy=f(x)
求解遵循“先求齐次方程通解,再求非齐次方程特解,最后叠加”的步骤,具体如下:
(1)求齐次方程的通解
对应的齐次方程为:
y
′
′
+
p
y
′
+
q
y
=
0
y'' + p y' + q y = 0
y′′+py′+qy=0
- 构造特征方程:将 y ′ ′ y'' y′′、 y ′ y' y′、 y y y 分别替换为 λ 2 \lambda^2 λ2、 λ \lambda λ、1,得到特征方程 λ 2 + p λ + q = 0 \lambda^2 + p \lambda + q = 0 λ2+pλ+q=0;
- 求解特征根:解二次方程得到两个特征根 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2;
- 构造通解:根据特征根的不同情况,齐次方程的通解分为以下三种形式:
- 若 λ 1 ≠ λ 2 \lambda_1 \neq \lambda_2 λ1=λ2(两个不等实根),通解为 Y = C 1 e λ 1 x + C 2 e λ 2 x Y = C_1 e^{\lambda_1 x} + C_2 e^{\lambda_2 x} Y=C1eλ1x+C2eλ2x;
- 若 λ 1 = λ 2 = λ \lambda_1 = \lambda_2 = \lambda λ1=λ2=λ(两个相等实根),通解为 Y = ( C 1 + C 2 x ) e λ x Y = (C_1 + C_2 x) e^{\lambda x} Y=(C1+C2x)eλx;
- 若
λ
1
,
2
=
α
±
i
β
\lambda_{1,2} = \alpha \pm i \beta
λ1,2=α±iβ(一对共轭复根),通解为
Y
=
e
α
x
(
C
1
cos
β
x
+
C
2
sin
β
x
)
Y = e^{\alpha x} (C_1 \cos \beta x + C_2 \sin \beta x)
Y=eαx(C1cosβx+C2sinβx);
其中 C 1 C_1 C1、 C 2 C_2 C2 为积分常数。

(2)求非齐次方程的特解 y ∗ y^* y∗
特解形式由非齐次项 f ( x ) f(x) f(x) 的结构决定,采用“待定系数法”求解,具体形式如下:
1. f ( x ) = e α x P m ( x ) f(x) = e^{\alpha x} P_m(x) f(x)=eαxPm(x)( P m ( x ) P_m(x) Pm(x) 为 m m m 次多项式)
- 特解形式设为
y
∗
=
x
k
e
α
x
Q
m
(
x
)
y^* = x^k e^{\alpha x} Q_m(x)
y∗=xkeαxQm(x),其中
Q
m
(
x
)
=
a
0
x
m
+
a
1
x
m
−
1
+
⋯
+
a
m
Q_m(x) = a_0 x^m + a_1 x^{m-1} + \dots + a_m
Qm(x)=a0xm+a1xm−1+⋯+am 为待定
m
m
m 次多项式,
k
k
k 的取值规则为:
- 若 α \alpha α 不是特征方程的根,取 k = 0 k = 0 k=0;
- 若 α \alpha α 是特征方程的单根,取 k = 1 k = 1 k=1;
- 若 α \alpha α 是特征方程的二重根,取 k = 2 k = 2 k=2。
2. f ( x ) = e α x [ P m ( x ) cos β x + P n ( x ) sin β x ] f(x) = e^{\alpha x} [P_m(x) \cos \beta x + P_n(x) \sin \beta x] f(x)=eαx[Pm(x)cosβx+Pn(x)sinβx]( P m ( x ) P_m(x) Pm(x)、 P n ( x ) P_n(x) Pn(x) 分别为 m m m 次、 n n n 次多项式)
- 特解形式设为
y
∗
=
x
k
e
α
x
[
Q
L
(
1
)
(
x
)
cos
β
x
+
Q
L
(
2
)
(
x
)
sin
β
x
]
y^* = x^k e^{\alpha x} [Q_L^{(1)}(x) \cos \beta x + Q_L^{(2)}(x) \sin \beta x]
y∗=xkeαx[QL(1)(x)cosβx+QL(2)(x)sinβx],其中:
- L = max { m , n } L = \max\{m, n\} L=max{m,n}, Q L ( 1 ) ( x ) Q_L^{(1)}(x) QL(1)(x)、 Q L ( 2 ) ( x ) Q_L^{(2)}(x) QL(2)(x) 为两个独立的待定 L L L 次多项式;
- k k k 的取值规则为:若 α ± i β \alpha \pm i \beta α±iβ 不是特征方程的根,取 k = 0 k = 0 k=0;若 α ± i β \alpha \pm i \beta α±iβ 是特征方程的根,取 k = 1 k = 1 k=1。


解析:

(3)非齐次方程的通解
非齐次方程的通解为齐次方程通解与非齐次方程特解之和,即 y = Y + y ∗ y = Y + y^* y=Y+y∗。
3.3.2 非齐次项为和式: y ′ ′ + p y ′ + q y = f 1 ( x ) + f 2 ( x ) y'' + p y' + q y = f_1(x) + f_2(x) y′′+py′+qy=f1(x)+f2(x)
- 求解依据:线性微分方程的叠加原理,即若 y 1 ∗ y_1^* y1∗ 是 y ′ ′ + p y ′ + q y = f 1 ( x ) y'' + p y' + q y = f_1(x) y′′+py′+qy=f1(x) 的特解, y 2 ∗ y_2^* y2∗ 是 y ′ ′ + p y ′ + q y = f 2 ( x ) y'' + p y' + q y = f_2(x) y′′+py′+qy=f2(x) 的特解,则 y 1 ∗ + y 2 ∗ y_1^* + y_2^* y1∗+y2∗ 是原方程的特解。
- 求解步骤:
- 求对应齐次方程的通解 Y Y Y;
- 分别求 y ′ ′ + p y ′ + q y = f 1 ( x ) y'' + p y' + q y = f_1(x) y′′+py′+qy=f1(x) 和 y ′ ′ + p y ′ + q y = f 2 ( x ) y'' + p y' + q y = f_2(x) y′′+py′+qy=f2(x) 的特解 y 1 ∗ y_1^* y1∗ 和 y 2 ∗ y_2^* y2∗;
- 原方程的通解为 y = Y + y 1 ∗ + y 2 ∗ y = Y + y_1^* + y_2^* y=Y+y1∗+y2∗。

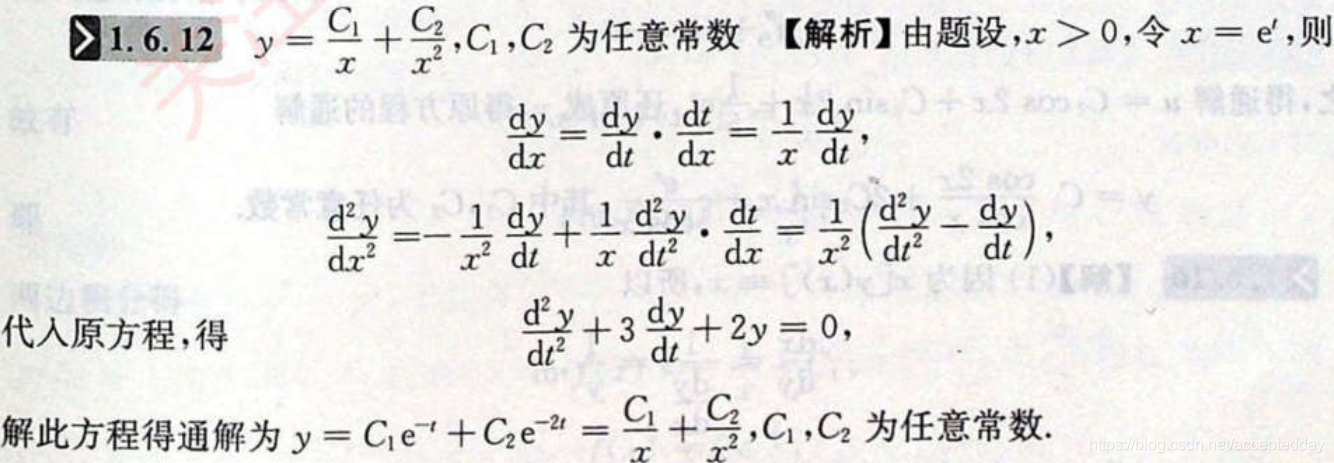
3.3.3 欧拉方程: x 2 y ′ ′ + p x y ′ + q y = f ( x ) x^2 y'' + p x y' + q y = f(x) x2y′′+pxy′+qy=f(x)
欧拉方程是特殊的变系数线性微分方程,通过变量替换可转化为常系数线性微分方程。
- 变量替换:
- 当 x > 0 x > 0 x>0 时,令 x = e t x = e^t x=et(即 t = ln x t = \ln x t=lnx);
- 当 x < 0 x < 0 x<0 时,令 x = − e t x = -e^t x=−et(即 t = ln ( − x ) t = \ln(-x) t=ln(−x));
- 导数转换关系:
通过复合函数求导可得:
x y ′ = d y d t , x 2 y ′ ′ = d 2 y d t 2 − d y d t x y' = \frac{dy}{dt}, \quad x^2 y'' = \frac{d^2 y}{dt^2} - \frac{dy}{dt} xy′=dtdy,x2y′′=dt2d2y−dtdy
代入原方程后,可将其转化为以 t t t 为自变量的二阶常系数线性微分方程; - 求解步骤:
- 通过变量替换转化为常系数线性微分方程;
- 求解转化后的方程,得到关于 t t t 的通解;
- 回代 t = ln ∣ x ∣ t = \ln|x| t=ln∣x∣,得到原欧拉方程的通解。

解析:
- 微分方程 | 定义、类型、解与示例(篇 1)-优快云博客
https://blog.youkuaiyun.com/u013669912/article/details/155299814
via:
-
Definitions and important facts regarding ODEs and PDEs - defs.dvi - defs.pdf
https://phas.ubc.ca/~berciu/TEACHING/PHYS312/LECTURES/FILES/defs.pdf -
高等数学学习笔记(1)——微分方程解法公式_微分方程求解公式-优快云博客
https://blog.youkuaiyun.com/qq_35357274/article/details/109935169 -
微分方程的求解方法-优快云博客
https://blog.youkuaiyun.com/acceptedday/article/details/111088294- 本文参考资料
[1] 3Blue1Brown. 【官方双语】微分方程概论-第一章[EB/OL]. 2019-04-24.
https://www.bilibili.com/video/BV1tb411G72z
[2] 3Blue1Brown. 【官方双语】微分方程概论-第二章:什么是偏微分方程?[EB/OL]. 2019-05-27.
https://www.bilibili.com/video/BV1q4411p7NX
[3] math也是柠檬精. 半小时内搞定一阶常微分方程(带技巧和例题)[EB/OL]. 2019-09-15.
https://www.bilibili.com/video/BV1qJ411A7QK
[4] math也是柠檬精. 半小时搞定高阶线性微分方程[EB/OL]. 2019-10-29.
https://www.bilibili.com/video/BV1qE411h7yp
[5] 柠檬草嘉6的店. 可降解的高阶微分方程[EB/OL]. 2019-03-08.
https://wenku.baidu.com/view/c05bb71cdcccda38376baf1ffc4ffe473368fda4.html
[6] 风车飞了的店. 全微分方程的解法[EB/OL]. 2018-11-16.
https://wenku.baidu.com/view/faefc09dc4da50e2524de518964bcf84b8d52d6c.html
- 本文参考资料
-
……

















 1921
1921

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









