



一种用于改善截肢者在冠状面不均匀且不可预测地形上平衡的冠状离合踝关节
为改善下肢截肢者在冠状面不平地形上的平衡能力,研发了一种冠状面离合踝关节 (CCA),可在初始接触后的前 60 ms内主动适应并实现±15度自由冠状足部旋转。三名下肢截肢受试者装配了CCA,并在设有中间台阶的仪器化步道上行走,该台阶分别为齐平、15度内翻或15度外翻状态。中间台阶表面覆盖不透明乳胶膜,使冠状面不平整地形具有不可预测性。与受试者临床 prescribed 假肢相比,CCA在早期站立相表现出显著更高的冠状角适应性。CCA还改善了受试者在恢复步期间的质心(COM)路径调节(内外侧位置变异减少),并减少了髋关节和跨步恢复策略的使用,表明其提升了受试者的平衡能力,并加快了对扰动的恢复速度。然而,CCA的使用并未显著影响受试者在扰动期间对冠状角动量的调节能力,表明CCA 并未改善动态平衡的所有方面。缩短CCA旋转轴与假体足底之间距离可能有助于解决这一问题。这些发现表明,在冠状面不均匀且不可预测的地形上行走时,主动调节假体踝关节冠状面角度可改善下肢截肢者的某些平衡功能。[DOI: 10.1115/1.4040183]
1 引言
许多下肢截肢者在行走时难以保持平衡,尤其是在需要快速应对地形变化的真实环境中。四分之一的户外跌倒发生在存在多种不平整地形的冠状面[1]。当下肢截肢者踏在不平整地形上时,维持平衡可能尤为困难,因为他们缺乏用于补偿的足踝肌肉,导致平衡控制能力下降[2–4]。
非截肢者能够优化其踝关节的冠状面特性,以在冠状面不平整且不可预测的地形上保持平衡(图1)[5]。然而,目前的假肢脚/踝系统缺乏动态优化其冠状面特性的能力,而是依赖于分体式龙骨和/或弹性缓冲系统的静态特性来适应地形。先前的研究表明,此类系统在改善内外侧平衡方面效果有限,这从ML足部放置错误后增大的迈步反应中可见一斑[6]。自适应假肢技术,如切换阻抗和半主动阻尼,可能改善截肢者步态的某些方面[7,8],但目前仅应用于假肢系统的矢状面动力学。因此,冠状面自适应假肢在步态和平衡控制方面的潜在优势仍未得到探索。
冠状面平衡由主动肌肉力量产生所调节,这影响了三种主要的平衡策略:前后足部放置、髋关节外展/内收以及踝关节内翻/外翻[9]。这些策略有助于调节整体的范围全身冠状面角动量(RCAM)[2,10], ,其已与临床平衡测试的结果相关联[11]。除了RCAM之外,调节全身质心( COM)轨迹的能力也提供了有关平衡控制的重要信息[12,13]。

稿件收到日期2017年1月18日;最终稿件收到日期2018年4月11日;在线发表日期 2018年7月13日。副编辑:伊丽莎白·萧‐韦克斯勒。
2 方法
2.1 装置
CCA的设计基于非截肢参与者在冠状面不平整地形上行走时踝关节的行为[5]。在步态周期的前50%阶段,冠状面踝关节角度在足跟触地(HS)后平均162 ms内达到其最大偏转角度的90%(不平整地形下)(图1)。在早期站立相,即垂直地面反作用力(GRF)峰值时刻(不平整地形下的平均值为182 ms),冠状面踝关节角度相对于平齐状态的平均差异为 þ11度(内翻)和 13度(外翻)(图1)。在早期站立相快速适应后,踝关节旋转似乎变得相对缓慢,足部在趾离地时逐渐回到相对中立位。这表明,假体踝关节若能在早期站立相实现角度自适应,将可降低冠状面踝关节力矩,从而减少对平衡的干扰。
因此,CCA被设计为在冠状面不平地形上行走时,使假肢脚的冠状面角度以与人体踝关节相似的程度和时间进行适应。CCA的冠状面旋转轴位于假肢脚锥形适配器的正上方 (图2)。这使得假肢脚能够顺应地形发生角度变化,而不会对其内部分趾结构产生较大变形,从而避免产生显著的反作用冠状面力矩。我们假设,与标准假肢脚/踝系统相比, CCA可降低在冠状面不平地形上迈步时产生的冠状面力矩,进而改善下肢截肢个体的平衡。
CCA(质量:1.24 kg,结构高度:165 mm)安装在用户的假肢接受腔与假肢脚之间(图2),并使用离合器来启用或禁用假肢脚的冠状面旋转。CCA的近端部分为刚性支柱结构,内部装有离合器及其他未在本研究中使用的组件。远端部分由假肢脚和脚架组成。近端与远端部分通过枢轴铰接,连接离合器输出卷筒和脚部卷筒的光谱绳(霍尼韦尔,莫里斯平原,新泽西州)(断裂强度4.5 kN)控制其相对运动。离合器与脚部卷筒之间的1:5传动比使得脚架处的角度停止分辨率为0.75度,回程间隙为0.3度。此外,当离合器脱开时,两个复位弹簧(每个平均刚度为1.7 N/度)可使近端与远端部分恢复至中立角度。
离合器采用棘轮和棘爪系统来控制离合器卷筒的旋转,该卷筒刚性连接到棘轮齿轮(图 3)。一组八个棘爪通过直弹簧钢丝施加偏压,从而啮合棘轮齿轮以阻止其旋转(图 3和 4)。棘爪释放臂向上运动时,棘爪脱离啮合,允许棘轮齿轮旋转。由一个改装为连续旋转的伺服电机(型号:S9650,Futaba,日本茂原)驱动的凸轮实现了这一动作。当凸轮旋转从0度到180度时,棘爪释放臂被抬升,在约160度时实现卷筒自由旋转。在180度时,凸轮上的台阶结合每个棘爪弹簧的偏压力,迅速降低棘爪释放臂的位置,使棘爪重新啮合棘轮齿轮,从而停止卷筒旋转。
CCA 在无束缚状态下运行,由一块 7.4 V 1000 mAh 锂离子电池供电,并通过 Arduino Micro 3.3V(Arduino,意大利都灵)进行控制。电位器 (型号SV01A103AEA01R00,村田制作所,日本京都)用于测量伺服、脚架和线轴角度;力敏电阻(型号402,Interlink,美国卡马里奥)用于测量足底压力;光传感器(型号ISL29125,Intersil,美国米尔皮塔斯)检测步道上战略性放置的蓝色信号灯,以向 CCA提示下一步将踏上不平整地形(见图5)。其他电子元件包括用于存储传感器数据(采样频率250Hz)的micro‐SD卡、 H桥电机驱动器(型号SN754410,德州仪器,美国达拉斯)以及一个简单的用户界面。
控制器专门针对参与者测试协议进行编程,确保CCA仅在踩到扰动时进行适应,并在恢复期脚跟触地之前将假肢脚返回至中立角度和锁定状态。试验开始时,CCA处于锁定状态。在扰动处足跟触地之前,CCA会将信号灯的出现和缺乏足底压力解释为启用离合器自由旋转的提示。在足跟触地时,假肢脚可自由适应地形约56毫秒,这是CCA感知到足底压力激增 (表示足跟触地)到停止离合器卷筒旋转之间的平均时间。在从扰动处蹬离后,CCA会释放离合器,使叶片弹簧将脚恢复至中立角度;在CCA下一次足跟触地之前,离合器再次被锁定。CCA设计用于在锁定模式下运行。在锁定模式下,脚架相对于假肢接受腔支柱的旋转被物理禁用。然而,两种模式产生的机械声音相同,以提高受试者对设备状态的盲化效果。
2.2 台架试验和结果
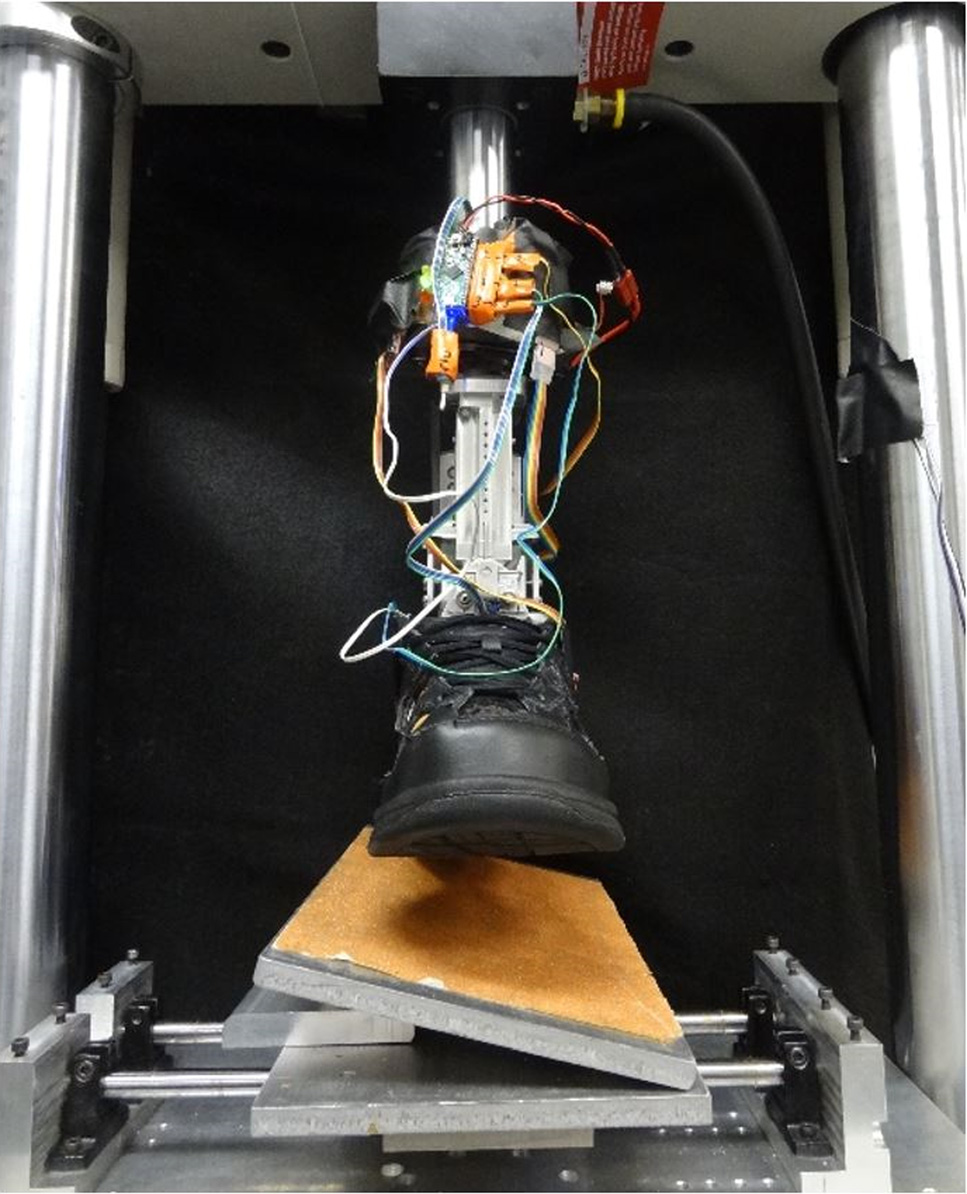
台架测试使用加载框架测试系统 (型号858 Mini Bionix II,MTS,伊登草原,明尼苏达州) 和定制基座来模拟在内翻和外翻地形上行走 [4]。该基座由一个15度冠状面倾斜表面组成,安装在一组线性轴承,允许内外侧平移(图6)。这可以防止系统过度约束,并已在类似的测试程序中使用[14]。将一个低剖面可变柔性脚 (Ossur,冰岛雷克雅未克)安装到CCA上,其参数代表了潜在受试者(尺寸:27,类别:4),并配有装饰性外壳和步行鞋(M577,新百伦,马萨诸塞州波士顿)。
测试头以50毫米/秒的速度进行位移,载荷上限为1000牛顿,并在此载荷下保持1秒保持期。1000 N载荷限制近似于对照研究中通过胫骨的平均最大轴向载荷,而加载速率约为观察值的25%。每种内翻、外翻和平底状态各进行十次试验。所有试验中,足部最初均处于三个旋转平面的中立位。台架试验的动力学数据以 120赫兹记录,CCA的角度数据以250赫兹记录。
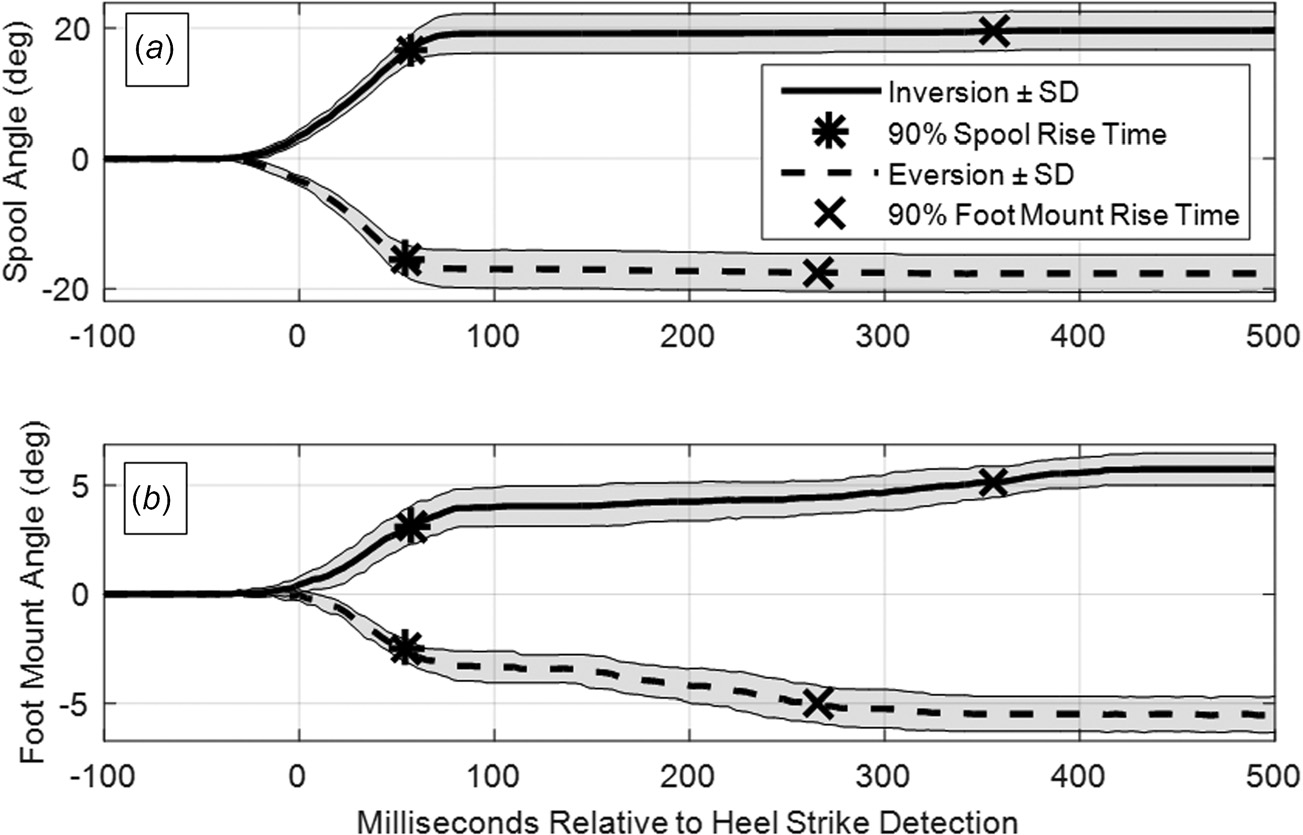
台架测试证实,基于其响应时间和结构完整性(未观察到塑性变形),CCA适用于人体受试者测试。CCA可在足跟触地后54–57毫秒的90%上升时间内停止离合器卷筒的旋转 (图7(a))。此时,脚架的旋转速度减慢,但并未完全停止,其90%上升时间为265–356毫秒(图7(b))。离合器卷筒与脚架上升时间之间的延迟归因于光谱绳的拉伸,这使得在离合器卷筒停止旋转后,脚架仍能继续旋转约3度(图7(b))。由于测试加载速率较慢,额外的3度旋转占脚架总活动范围的较大比例,因此只有在光谱绳被拉伸时,脚架才能达到其总活动范围的90%。然而,当CCA停止离合器卷筒旋转时,似乎将脚架的旋转分为了两种模式:一种是离合前模式,其特征是脚架具有相对较快的角速度;另一种是离合后模式,其特征是脚架具有相对较慢的角速度(图7(b))。在测试载荷被释放后,CCA平均需要428 毫秒使足部安装角度回到中立位并锁定离合器,为下一次足跟触地做准备。如果假肢侧肢体从受干扰的脚跟离地到恢复期脚跟触地之间的时间短于CCA所需时间,则在恢复步期间,脚架可能在冠状面内旋转±15度,直到离合器锁定。根据之前研究的时间数据[5],这种情况被认为不太可能发生;然而,踏步策略和髋关节策略也应能对此类情况提供足够的恢复能力,同时扶手作为额外预防措施以避免跌倒。
 CCA的展开视图,所有主要组件分为近端部分(顶部)和远端部分(底部))
CCA的展开视图,所有主要组件分为近端部分(顶部)和远端部分(底部))


 带有嵌入式测力板、扶手和用于与CCA通信的信号灯(蓝色梯形)的步道)
带有嵌入式测力板、扶手和用于与CCA通信的信号灯(蓝色梯形)的步道)
2.3 人体实验设置
在步态实验室中,使用一条(8.0 米× 1.5 米)的走道产生冠状面不均匀且不可预测的地形,其中间台阶位于一个测力台(型号:9286AA,奇斯特勒,瑞士温特图尔) 上,该测力台可在冠状面内刚性定位 ±15 度,或与走道齐平 (图 5)。研究人员通过定制夹具手动调整测力台位置,并使用快速夹钳和螺栓将其固定 [5]。此扰动的位置可用一个0.5 毫米厚的可拆卸不透明乳胶膜遮盖。该孤立扰动旨在模拟踩到石头、物体或其他单一冠状面扰动的情况,以便观察平衡恢复过程 [5]。
在扰动附近放置一个发光二极管,用于提示其存在至CCA(详见 第 2.1 节)。可调节中间板和四个附加测力台(型号: BP400600,AMTI,马萨诸塞州沃特敦)可用于采集扰动步及前后两步的动力学数据。采用12相机运动捕捉系统(维康运动系统,英国牛津)以120赫兹记录标记点轨迹,同时以1200 赫兹采集测力台数据。对运动学数据和动力学数据分别采用截止频率为 6 赫兹和25 赫兹的数字四阶低通巴特沃斯滤波器进行处理。
2.4 人体实验方案
受试者穿上黑色氨纶服装、合适尺寸的步行鞋(型号:M577,新百伦,马萨诸塞州波士顿)、运动追踪标记点,并装配CCA或其临床处方的(称为:按处方)假肢。如果测试CCA,则由认证持证假肢师将CCA与参与者现有接受腔以及合适尺寸和类别的低剖面可变柔性脚进行对齐。人体测量数据包括身高、质量、肢体长度、关节宽度和走廊自主选择步行速度也被记录下来。
测试持续两天。其中一天测试受试者按处方配置的假肢,另一天测试CCA装置在自适应模式和锁定模式下的表现。按处方配置的假肢与CCA装置的测试顺序是随机化的,CCA模式的呈现顺序也同样随机化。在佩戴每种假肢时,受试者需行走通过内翻、外翻和平整地形,以及盲态内翻和盲态外翻地形。为了使受试者熟悉地形,在盲态试验前先进行非盲态试验。在非盲态试验中,地形条件以区组随机顺序呈现,每个位置重复 3至5次,具体次数取决于时间限制。对于每种条件,要求受试者以自主选择速度在步道上行走,并用其假肢脚撞击扰动装置。在盲态试验期间,扰动装置处于内翻或外翻状态,且每次试验的位置对受试者随机呈现,每个位置重复3至5次,具体次数取决于时间限制。所有盲态试验中,扰动装置上方覆盖不透明乳胶膜,以遮蔽其位置信息。每次盲态试验前,受试者在关闭的门后单独房间内等待,以增强对地形条件的盲态效果。给予受试者的指示与非盲态试验相同。若受试者的脚落在用于记录扰动步、前进步或恢复步的测力台之外,则该试验被拒绝。扰动步由假肢侧肢体完成。前进步和恢复步由健全肢体完成,分别紧接在扰动步之前和之后发生(图8)。
2.5 分析
在Visual 3D(C‐Motion,盖瑟斯敦,马里兰州) 中创建了一个17段改良插件式步态模型(英国牛津Vicon运动系统有限公司)[15],并结合Matlab(MathWorks,纳提克,马萨诸塞州)用于生成所报告的指标[5]。为了改善冠状面足部运动的追踪效果,在第一、第二和第五跖骨头上,以及跟腱在跟骨上的附着点(或假肢脚上相应的等效位置)放置了标记点。对于所有假肢条件,残肢和接受腔被建模为一个单一的刚性节段,并定义了一个踝关节中心(AJC)。定义为与健全肢体的内侧和外侧踝突相对应的两个标记点之间的中点。此外,CCA 的远端部分被建模为与假肢脚分离的独立节段,从而可以相对于 CCA 的近端部分独立追踪刚性脚架和柔性假肢脚。残肢和接受腔的惯性属性在不同假肢条件下保持不变,而 CCA 和按处方配置的假肢的惯性属性则根据质量差异进行了调整。
假肢脚和脚架的适配通过欧拉角进行评估,两者均以 CCA(或按处方假肢的假肢接受腔支柱)的近端节段为参考进行计算。脚架角度测量了假肢脚锥形适配器的旋转,该角度是CCA设计所要控制的。脚角度测量了假肢脚的总旋转,包括脚架角度以及脚掌龙骨的任何附加弹性变形。这两个角度均在早期站立相测量,定义为站立相前50%内垂直地面反作用力峰值时刻。还计算了假肢脚角度的90%上升时间,用于评估每种测试假肢条件的适应速度。
通过恢复步中站立相中期的内外侧质心位置相对于前进步足跟触地时质心位置的变化来评估参与者在恢复过程中对全身质心轨迹的调节(恢复步质心 X )。采用足部内外侧位置(MLFP)来评价恢复过程中的迈步策略[ 5 ],其定义为健全脚足跟触地时全身质心到踝关节中心(AJC)之间的内外侧距离恢复步。足跟触地定义为鞋与测力台首次接触时的时刻。扰动步的内外侧冲量用于表征可能影响受试者恢复过程(如质心轨迹调节和迈步策略使用)的外力。内外侧冲量通过在扰动步的支撑期内对扰动步的内外侧地面反作用力(相对于实验室坐标系)进行积分计算得到。
通过使用从前进中站立相到恢复步中站立相之间的 RCAM来评估扰动期间的步态平衡。这一时间段被称为扰动步行期,其范围计算为该时期内最高值与最低值之间的差值 [5]。围绕CCA枢轴(或对于按处方假体,具有相同方向和位置的轴)以及髋关节的冠状面力矩,通过扰动站立相期间的积分进行表征,该指标称为冠状面角冲量(CAI)[16]。
左下肢截肢受试者的关节角度和力矩被取反,以使所有测量值相对于右下肢截肢受试者。恢复MLFP被归一化至身体高度。RCAM被归一化至行走速度、身体高度和体重。关节力矩和地面反作用力(及其相应的积分)被归一化至质量。
2.6 统计学
所有统计假设均采用显著性水平为0.05的三因素固定效应方差分析(ANOVA)进行检验。方差分析的因素包括假肢、地形,以及受试者,两者之间均包含交互效应。由于本研究的样本量较小,受试者被用作方差分析的一个因素,每位受试者被视为一个独特的类别(详见第4.3和4.4节的进一步讨论)。在适当情况下,使用图基显著性差异检验来确定在给定地形条件下不同假肢之间的成对差异的显著性。对于RCAM、关于CCA枢轴的CAI、早期站立相足部角度、恢复MLFP、恢复 COMX、内外侧(ML)冲量以及髋关节CAI,假设在给定的不平整地形条件下,假肢条件之间会存在差异。
3 结果
三名患有创伤性病因单侧经胫截肢的受试者知情同意参与本经机构审查委员会批准的研究(质量:86.2±63.6 kg,身高: 1.80±0.03 m,年龄:48.7±17.0 yr)。所有受试者均为男性,已装配并使用假肢超过一年,无需辅助工具即可行走,且无自我报告的影响步态的状况。受试者按处方配备的假肢脚部如下:Vari‐Flex、Vari‐Flex XC 和 Vari‐Flex XC Rotate (奥苏尔,雷克雅未克,冰岛)。每位参与者均能顺利完成每种假肢/地形条件组合的至少三次成功试验。
受试者的冠状面站立初期足部角度表现出显著的假肢、地形以及假肢‐地形交互效应(p < 0.001)(表 1)。在内翻地形上,自适应CCA的早期站立相足部角度显著更内翻,相较于其他假肢条件(p< 0.001);在外翻地形上,其足部角度显著更外翻,相较于其他假肢条件(p< 0.001)(图 9,表 1和 2)。此外,在不平整地形上,自适应CCA在早期站立相的足部角度相对于平齐状态存在15–17度的偏差,比其他假肢条件多出6– 10度的偏差(图 9和表 2)。当CCA适应不平整地形时,脚架的冠状面站立初期角度在内翻和外翻地形上的适应程度分别比假肢脚少9.1度和2.5度。自适应CCA足部角度的90%上升时间在内翻时为77毫秒,在外翻时为142毫秒(表 2)。

一种用于改善截肢者在冠状面不均匀且不可预测地形上平衡的冠状离合踝关节(续)
表1 来自性能指标三因素方差分析检验的p值。除非另有说明,所有指标均指扰动站立相或扰动时期。针对给定地形条件下的假肢条件进行成对比较。加粗的p值被认为具有显著性。缩写:A,冠状自适应踝关节;L,冠状锁定踝关节;AP,按处方;ES,支撑初期;CAI,冠状面角冲量(CAI);CCA,冠状离合踝关节;COMX,质心内外侧位置;RCAM,冠状面角动量范围;ML,内外侧;MLFP,足部内外侧位置。
| 指标 | 假肢 main 效果 | 地形 main 效果 | 假肢‐地形交互效果 | 非盲法齐平地形 A-L | 非盲法齐平地形 L-AP | 非盲法齐平地形 A-AP | 盲法内翻地形 A-L | 盲法内翻地形 L-AP | 盲法内翻地形 A-AP | 盲法外翻地形 A-L | 盲法外翻地形 L-AP | 盲法外翻地形 A-AP |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 足部角度 | 0.001 | <0.001 | <0.001 | 0.191 | 0.738 | 0.002 | <0.001 | 0.391 | <0.001 | <0.001 | <0.001 | <0.001 |
| CCA 枢轴 CAI | <0.001 | <0.001 | 0.002 | 0.998 | 0.068 | 0.015 | 0.010 | 0.149 | 0.986 | 0.007 | 0.025 | 1.000 |
| 恢复质心X | 0.059 | <0.001 | <0.001 | 1.000 | 0.321 | 0.491 | <0.001 | 0.638 | 0.035 | 0.876 | 1.000 | 0.737 |
| 恢复MLFP | 0.038 | <0.001 | <0.001 | 1.000 | 0.616 | 0.613 | <0.001 | 0.674 | <0.001 | 0.261 | 1.000 | 0.103 |
| RCAM | 0.003 | <0.001 | 0.370 | 1.000 | 0.246 | 0.104 | 1.000 | 1.000 | 0.982 | 0.515 | 1.000 | 0.407 |
| 髋关节CAI | 0.254 | <0.001 | <0.001 | 0.998 | 0.999 | 1.000 | 0.007 | 0.023 | 1.000 | 0.082 | 1.000 | 0.168 |
| 内外侧冲击 | 0.694 | <0.001 | 0.012 | 0.645 | 1.000 | 0.915 | 0.047 | 0.902 | 0.639 | 1.000 | 1.000 | 1.000 |
表2 Mean and standard deviations(in parenthesis) for all performance metrics. All metrics refer to disturbed stance or disturbed period unless otherwise noted. Abbreviations: CCA, coronally clutching ankle; ES, early stance; RT, 90% rise time; CAI, coronal angular impulse; COMX, center of mass mediolateral position in mid stance recovery step relative to its position at HS of the lead-in step; RCAM, range of coronal angular momentum; ML, mediolateral; MLFP, mediolateral foot position.
| Metric | Unit | Unblinded flush terrain CCA adapting | Unblinded flush terrain CCA locked | Unblinded flush terrain As-prescribed | Blinded inversion terrain CCA adapting | Blinded inversion terrain CCA locked | Blinded inversion terrain As-prescribed | Blinded eversion terrain CCA adapting | Blinded eversion terrain CCA locked | Blinded eversion terrain As-prescribed |
|---|---|---|---|---|---|---|---|---|---|---|
| Complete trials | N/A | 12 | 13 | 13 | 12 | 11 | 13 | 11 | 12 | 13 |
| ES foot angle | deg | 6.6(2.3) | 5.6(0.3) | 4.9(0.3) | 21.8(2.3) | 13(1.4) | 14.0(1.5) | -10.3(1.3) | -0.9(2.0) | -3.7(1.0) |
| ES foot-mount ang. | deg | 0.5(2.7) | -0.5(0.0) | N/A | 12.7(3.8) | 0.1(0.5) | N/A | -12.8(2.2) | -1.2(0.5) | N/A |
| Foot angle RT | ms | 115(30) | 160(33) | 135(35) | 77(27) | 131(28) | 150(23) | 142(50) | 138(34) | 134(32) |
| CCA pivot CAI | N·m·s/kg | 0.000(0.009) | 0.004(0.010) | 0.016(0.032) | -0.121(0.019) | -0.139(0.026) | -0.126(0.043) | 0.134(0.014) | 0.116(0.017) | 0.131(0.048) |
| Recovery COMX | mm | -42(21) | -43(25) | -20(25) | -33(31) | 20(37) | 1(30) | -49(21) | -64(32) | -68(30) |
| Recovery MLFP | mm | 44(14) | 43(10) | 38(12) | 42(15) | 16(12) | 24(14) | 40(15) | 48(16) | 50(11) |
| RCAM | N/A | 0.043(0.009) | 0.042(0.006) | 0.038(0.006) | 0.039(0.005) | 0.038(0.007) | 0.037(0.006) | 0.054(0.009) | 0.051(0.011) | 0.051(0.007) |
| Hip CAI | N·m·s/kg | -0.301(0.028) | -0.291(0.360) | -0.301(0.071) | -0.293(0.057) | -0.334(0.056) | -0.297(0.073) | -0.292(0.078) | -0.255(0.061) | -0.262(0.081) |
| ML impulse | N·s/kg | -0.252(0.029) | -0.220(0.066) | -0.225(0.029) | -0.134(0.092) | -0.194(0.049) | -0.173(0.125) | -0.213(0.117) | -0.205(0.105) | -0.204(0.071) |
CCA 枢轴表现出显著的假肢、地形以及假肢‐地形交互效应(<0.05),并且在每种地形条件下,不同假肢条件之间的成对差异也显著(表1)。然而,枢轴在不同地形条件下的数据呈现出紧密聚集的趋势(图10和表1),地形条件之间的平均差异比假肢条件之间的平均差异大近一个数量级(表2)。
恢复质心表现出显著的地形效应(<0.001),以及假肢‐地形交互作用效应(<0.001)(表1)。在盲性内翻情况下,自适应的恢复质心显著地(<0.05)不同于其他假肢条件,位置更偏向受试者的左侧(健全肢体侧)(表1、2和图8)。此外,在所有地形条件下,自适应的恢复质心表现相对恒定(图8);自适应的平均恢复质心范围为33至49 mm(范围为16 mm),相当于锁定(84 mm)和按处方(69 mm)条件对应范围的19–23%(表2)。
恢复MLFP表现出显著的假肢(p = 0.038)、地形(p < 0.001)以及假肢‐地形交互作用(p < 0.001)效应(表1)。在盲性内翻条件下,自适应CCA条件与其他假肢条件相比存在显著差异(更偏外侧)(p < 0.001)(表1、2及图8)。此外,在所有地形条件下,自适应CCA的平均恢复MLFP表现得相对恒定,范围为40至44 mm(4 mm范围),仅为锁定(32 mm)和按处方(26 mm)条件对应范围幅度的13–15%(表2及图8)。
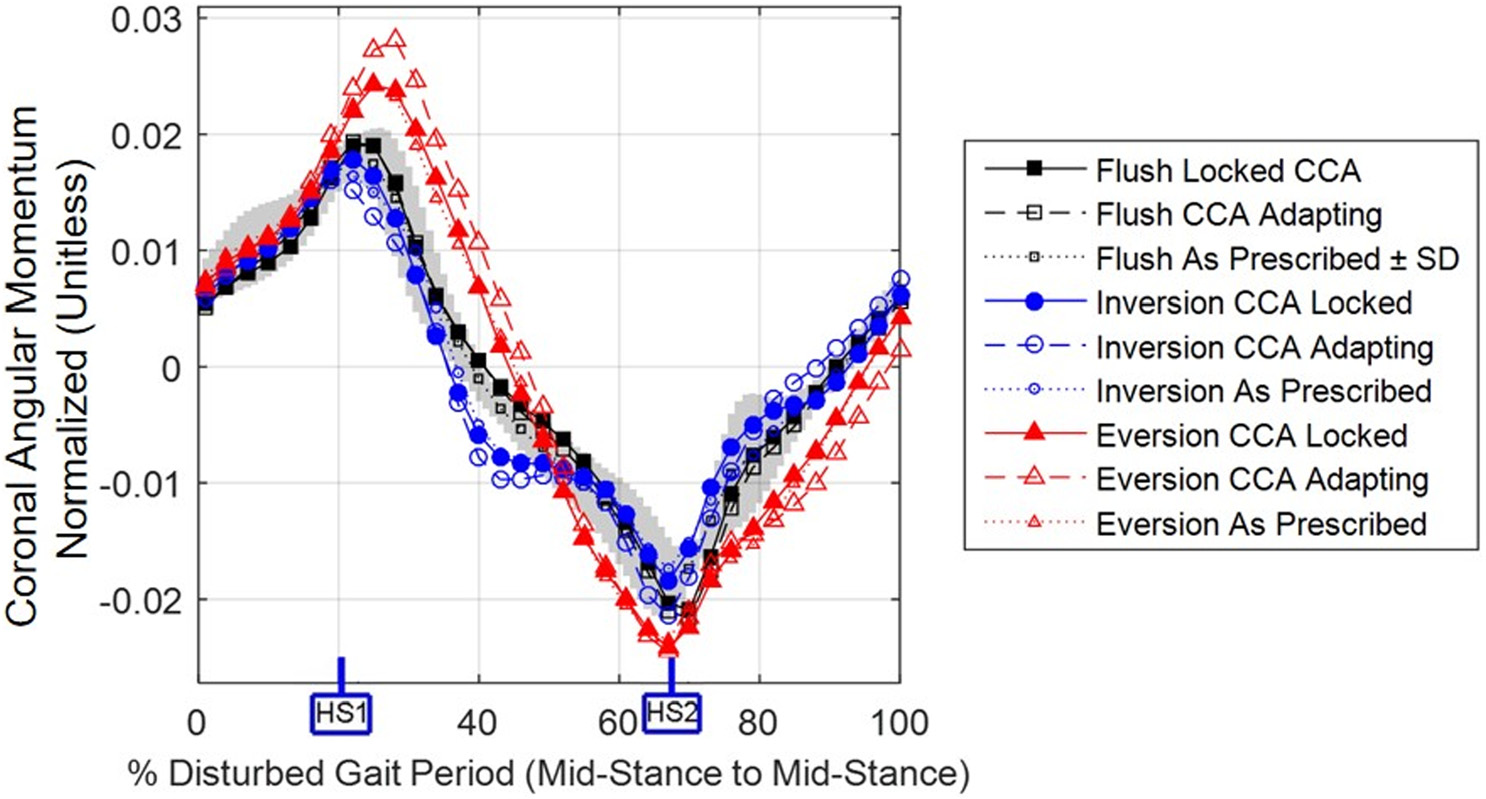
冠状面角动量范围按地形条件紧密分组(图11和表1)。假肢(p = 0.003)和地形(p < 0.001)对RCAM均存在显著主效应;然而,在特定地形条件下,各假肢条件之间的成对比较无显著差异(表1)。平均而言,盲性外翻条件下的RCAM最大,比其他地形条件高27–37%(表2)。
髋关节CAI表现出显著的地形和假肢‐地形交互效应(p < 0.001)(表1)。此外,在盲翻转条件下,适应模式与锁定CCA条件之间存在显著差异(p < 0.05)(表1)。与髋关节CAI密切相关的是,中站立相期间的髋关节力矩似乎按地形条件紧密分组,而在早期站立相期间不同假肢条件之间的差异更为明显(图12)。
扰动步态的内外侧冲量表现出显著的地形和假肢‐地形交互效应(p < 0.05)(表1)。平均而言,内翻时的内外侧冲量更偏向正值(外侧方向),而外翻时则更偏向负值(内侧方向)。在盲性内翻情况下,自适应CCA条件下的内外侧冲量为0.134 N·s/kg,显著高于(p = 0.047)锁定CCA条件(0.194 N·s/kg)(表2)。
4 讨论
4.1 解释
自适应CCA成功地使假肢脚的冠状面角度适应不平坦地形,表现为与其他假肢条件相比,内翻/外翻程度显著更大(图9和表1)。CCA足部安装架表现出明显较小的活动范围(26度),小于假肢脚本身(32度)(图9和表2),表明离合器在脚架达到其最大活动范围(30度)之前已将其停止,而假肢脚最后几度的适应是通过脚部的弹性变形实现的。CCA并未完全模仿生物足的角度适应(图1)。
具体而言,自适应CCA的上升时间快了12–52%,且25%的早期站立相中更大的活动范围(表2)。据非正式反馈,参与者注意到了CCA的适应模式,描述其为“活跃”和“积极”,表明更精细的适应可能更有益处。
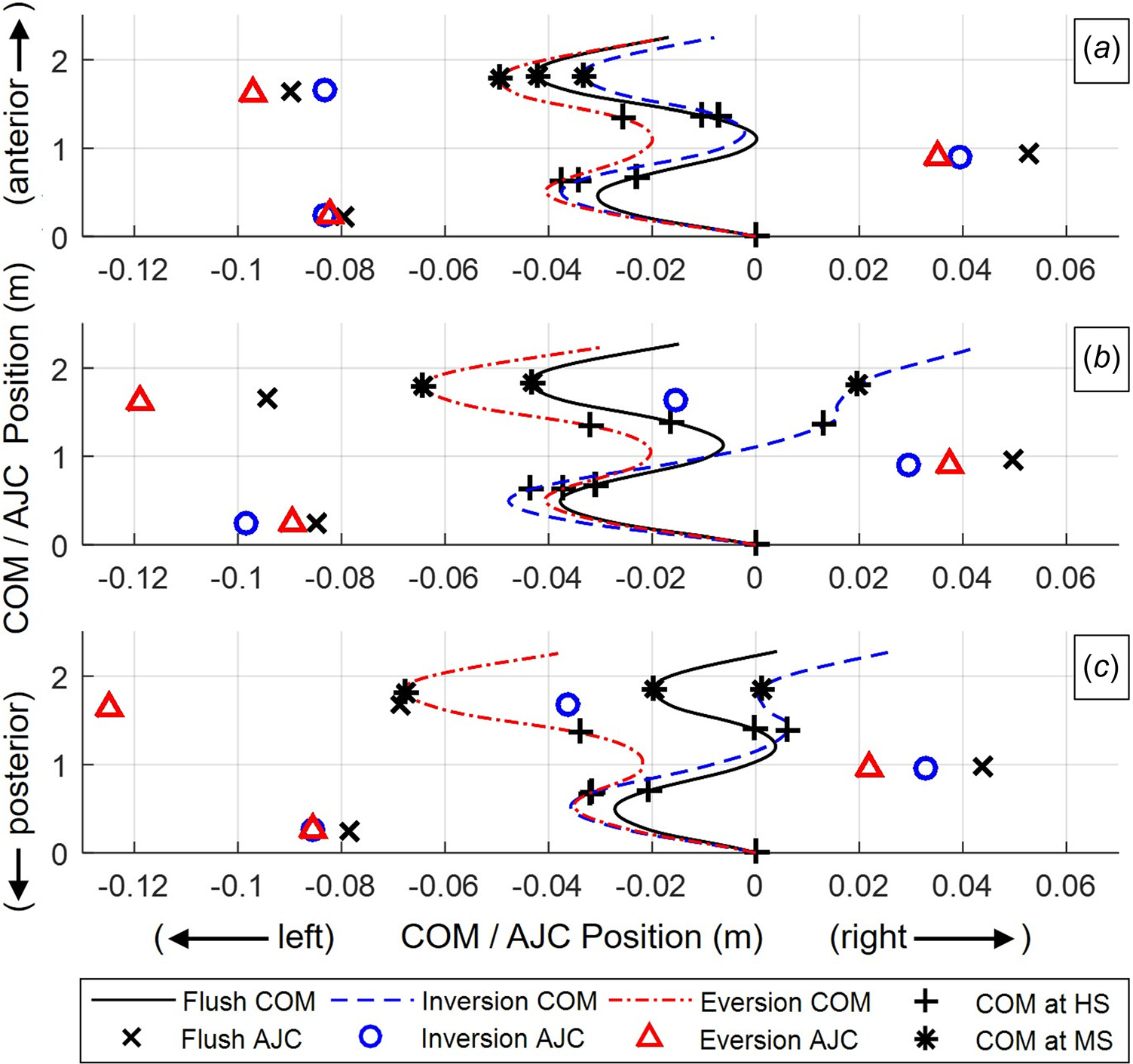
自适应CCA与受试者在不平整地形行走时质心路径调节的改善相关,通过参与者的恢复质心路径进行测量 X 。当使用自适应CCA假肢时,受试者在不平整地形上的恢复质心路径 X 与受试者在平整地形上无扰动步态期间的典型恢复质心路径值相似(表2)。此外,当使用自适应CCA假肢时,受试者在所有地形条件下的恢复质心路径范围约为其他假肢条件下相应范围的25%(表2)。与自适应CCA相关的质心路径调节改善也在图8(a)中可见,其中在踩到不平整地形后,内翻和外翻对应的质心路径相对于平齐状态的偏离明显减少,地形条件,与其他假肢条件相比(图8(b)和8(c))。
有趣的是,CCA的调整似乎并未改善受试者在不平整地形上对冠状角动量的调节能力,这由RCAM在特定地形下不同假肢条件之间未表现出显著差异所表明(表1)。与先前的研究一致,截肢者受试者的稳定性似乎低于非截肢者,因为在所有条件下其RCAM大约高出45%[2,5]。我们假设,通过在不平整地形行走时减小围绕CCA枢轴的扰动力矩,CCA的调整将提升受试者调节冠状角动量的能力。然而,CCA 枢轴 CAI 仍紧密地按地形条件分组,且假肢条件之间的差异比地形条件之间的差异小一个数量级(图10和表2)。因此,假肢条件的影响似乎不够大,在CCA枢轴时刻对受试者冠状面角动量的调节产生有意义的影响。
由于从枢轴到支撑底面(步行鞋底部,见图13)的距离为120mm,CCA的适应模式对CCA枢轴处的力矩影响很小。当CCA适应不平整地形时(图13(a)和13(b)),压力中心相对于支撑底面发生移动,这种移动会减小地面反作用力关于CCA枢轴的力臂。然而,与此同时,支撑底面也发生了移动(移动距离与120mm长度成比例),这种移动会增加地面反作用力关于CCA枢轴的力臂。因此,当CCA适应不平整地形时,地面反作用力关于枢轴的力臂似乎保持与锁定状态下的CCA相同(图13(c)和 13(d))。这一看似恒定的力臂可能解释了在特定地形下所有假肢条件中观察到的相对恒定的CCA枢轴力矩(图10和表2)。
冠状离合踝关节的适应模式还与受试者在从扰动中恢复时减少使用髋关节策略和迈步策略相关。扰动站立相期间的髋关节CAI在不同地形条件下表现出均值范围,该范围比其他假肢条件下的相应值小79–90%(表2)。这表明当CCA处于适应模式时,髋关节策略的使用减少。这与非截肢者的反应不同,非截肢者在不平整地形上行走时依赖髋关节策略,并且在所有地形条件下均表现出更大的冠状面髋关节力矩幅值[5]。相比之下,当下肢截肢受试者使用CCA并处于适应模式时,其迈步策略更接近非截肢者的反应,相较于其他假肢条件而言。在这两种情况下,在恢复步中均观察到迈步策略的最小化使用,这一点由受试者在所有地形条件下表现出相对较小的恢复MLFP范围(4–15 mm)所表明[5],,而使用非适应性假肢的受试者该范围为26–32 mm(表2)。这些结果结合恢复步期间更为稳定的质心调节表明,CCA对不平整地形的适应使受试者能够在扰动步内更好地调节其步态的某些要素,从而实现更快的恢复。
对扰动步力学的进一步探索表明,在比较自适应CCA与其他假肢条件时,施加在受试者身上的内外侧地面反作用力存在显著差异。具体而言,自适应CCA与以下情况相关:与盲性内翻中的其他假肢条件相比,内外侧地面反作用冲量高出20–30%(更具外侧方向性)(表2)。这种差异的幅度与地形条件之间的平均差异相似,表明其可能对受试者的恢复产生了显著影响。尽管存在这种更具外侧方向性的冲量,质心轨迹仍与开放性齐平类似,并且相较于锁定和按处方条件更偏左(图8)。这一意外反应需要进一步研究,以明确内外侧冲量的差异与CCA适应以及受试者后续恢复反应之间的关系。
4.2 意义
我们观察到,假肢脚冠状面角度的适应与改善的质心路径调节以及在从不平整地形恢复过程中减少对迈步和髋关节策略的依赖相关。然而,还应注意的是,在没有CCA适应的情况下,假肢脚仍通过变形表现出约67度的冠状面适应。该范围覆盖了美国交通部建议的人行道允许的最大坡度 [17],,这表明冠状自适应假肢可能为在控制较少的环境中行走的截肢者提供最大益处。
4.3 局限性
主要局限性在于所使用的样本量较小(n=3),以及采用了较不保守的统计模型,其中受试者效应为固定效应。因此,所得结果仅可应用于该样本,而不能推广至总体人群;然而,这些结果支持了CCA在改善平衡及从不平整地形恢复方面的潜在有效性,并证明了进一步在更广泛样本群体中进行测试的合理性。另一个局限性是受试者接受CCA的训练期较短。如果实施更渐进的训练方案,受试者可能会更加熟悉CCA,从而更好地利用其功能[18]。最后,地形扰动本身也存在限制,所有条件均伴随轻微的台阶下降,平齐状态为7 mm,内翻和外翻条件为27 mm。
4.4 未来工作
未来工作将包括使用更大的样本群体进行实验。设计修改可包括减小CCA枢轴与支撑底面之间的距离,以使CCA能够减小冠状面不平地形产生的扰动力矩。也可考虑对脚架的旋转进行阻尼,以便调节假肢脚的上升时间,在不平整地形行走时更好地匹配生物足的上升时间。最后,未来的CCA迭代版本可能会使用额外的传感器来检测不平整地形,而无需信号灯的存在。




















 691
691

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









