



设计人工踝关节运动的方法
摘要
在本研究工作中,对为胫骨截肢者创造便利条件而开展的人工踝关节的分析与设计方面进行了探讨。人工系统的开发已取得最强大的影响,以复制截肢部位或器官的功能表现和功能。本文开展了与人体工程学和人因相关的研究工作,以促进肢体残疾人人士的发展。这些系统旨在激活受损的肢体,以便使整个生命系统与相应的人工肢体协同实现可操作性。活体通过感觉器官对系统各部分实施整体控制。人工肢体需要与相关系统正确连接,并与截肢患者的肢体直接相连。通常需通过运动来控制的人工肢体,与肌电图信号相关。在此背景下,EMG(肌电图)通过电机驱动肢体,提供适当的输出信号,最终实现踝关节所需的运动或操作。
关键词 —踝关节,生物力学,肌电图,运动
I. 引言
在人体生物力学研究中,通常需要对任务的执行情况进行评估。具有适当功能特征的人工机械驱动踝关节运动[1]需要生物力学的支持。本文尝试提出了足底和背屈自然踝关节运动[2]的设计方案。通过采用生物医学方法,利用机械电机来复制关节运动。实现具备自然同步步态的人工踝关节设计是本研究的重点。本研究将阐述针对人体下肢生物信号的假肢模型及基于仿真的相关工作。
康复[5]过程则系统地应用工程方法和科学原理,以满足需求并克服截肢者面临的困难。设计一种与人体神经肌肉系统完全集成的机器人机构是一项艰巨的任务。准确复制所有类型的下肢运动并有效地加以利用[6]是一个巨大的挑战。机器人学与生物力学均具有重要影响,结合他们的技术,制造出完美的生物机电一体化机制。
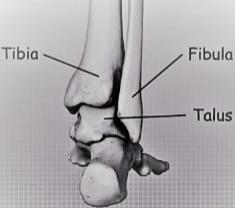
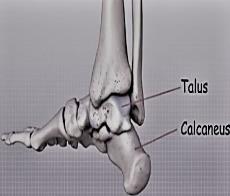
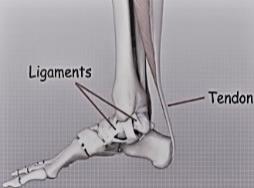
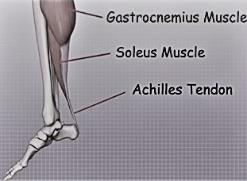
踝关节的基本解剖学[3]包括骨骼、肌肉、韧带、血管、关节、肌腱和神经,如图1所示。人体足部的上部称为背侧表面,下部称为跖面。人体踝关节外侧面上存在的骨性区域称为外踝,踝关节内侧的骨性区域称为内踝。人体踝关节由距骨、胫骨和腓骨三个关节的连接构成,如图2.a所示。踝关节的运动是多种韧带和许多软组织共同作用的结果。踝关节中两种最重要的软组织是韧带和肌腱,如图2.c所示。韧带连接骨骼与骨骼,而肌腱则将骨骼连接到肌肉。在行走、跑步和跳跃等活动中最重要的肌腱是跟腱,如图2.d所示,它将两条小腿肌肉连接到跟骨,如图2.b所示。人工系统旨在复制踝关节的正常运动。模型开发包括在人工系统踝关节[7]处实现肌电图(EMG)信号以及编程执行器或伺服电机功能。

II. 方法论
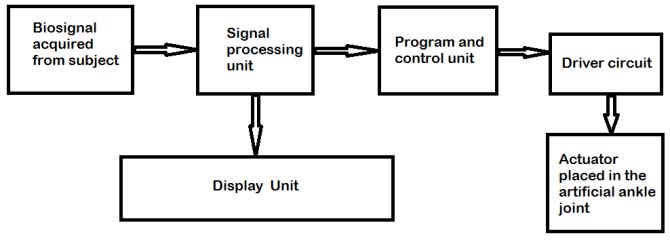
如图3所示的上述框图中,描述了工作流程的概览。首先,从人体踝关节获取生物信号。输出信号经过噪声滤波和放大处理。通过编程实现踝关节在跖屈和背屈时的角运动控制。系统合理的输出结果通过人工系统踝关节处的伺服电机运动来呈现。
人体踝关节的生物力学特性[11]表现出一些特征,这些特征计划在人工踝关节设计阶段实现。设计实施的重要因素[13]如下:
1) 所开发的模型必须具备能够支撑截肢者下肢重量的结构强度。
2) 所设计系统的重量应与人体踝关节缺失部分的重量相匹配。
3) 人工材料必须具备承受足够冲击的能力,同时保证舒适的运动,并防止与运动机制相关的任何机械损伤。
4) 踝关节必须在冠状面具有侧向柔韧性(内翻和外翻),以更好地适应自然运动。
A. 描述人类行走步态周期:的步态周期的人体行走:原型开发的最终目标是实现人体步态周期
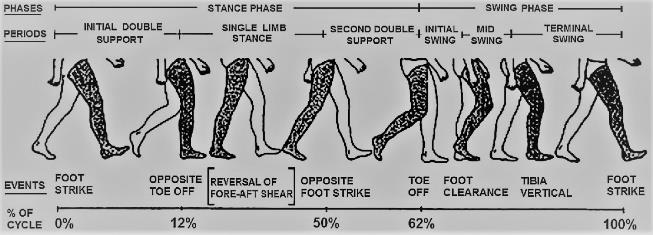
人体步态周期包含两个阶段,即支撑相和摆动相。支撑相从足跟触地开始,持续到脚尖离地位置。支撑相约占步态周期的60%。其余部分(38‐40%)为摆动相。支撑相可分为三个子阶段,如图4所示。
a) 跖屈占人体步态周期的12%,从足跟触地开始到足底平放结束。
b) 背屈占人体步态周期的38%,从足底平放开始到最大背屈位置结束。
c) 动力性跖屈完成人体步态周期的10‐12%,从最大背屈位置开始到脚尖离地位置结束。
摆动相被视为“非负重”阶段,即从一条肢体的大脚趾离地开始,到同一条肢体的足跟触地之前结束。摆动相包括三个阶段,例如:a) 初始摆动是该阶段的起始部分加速,b) 中期摆动,以及c) 末期摆动是减速阶段。
a) 初始摆动是摆动相的初始三分之一阶段,占步态周期的60‐73%。
b) 中间摆动是摆动相的中间三分之一阶段,占步态周期的73‐87%。
c) 减速是摆动相的最后三分之一阶段,占步态周期的78‐100%。
B. 踝关节的角运动:模型的关节旋转角范围基于正常行走时人体踝关节活动范围,如表1所示,其中正常行走速度为1.4米/秒
在支撑相末期,当足部离开地面时,跖屈的最大角位移为7度。背屈的最大角位移为16度,发生在终末控制性背屈阶段,如表1所示。
| SL. 第 号 | 步行 类型 | 脚跟 触地 (度) | 控制 足底 屈曲(度) | 最大值 背屈(度) | 离地(度) |
|---|---|---|---|---|---|
| 01 | Slow | +2 | -7 | +16 | +3 |
| 02 | 正常(1.4米/秒) | +1 | -7 | +15 | -4 |
| 03 | Fast | +5 | -5 | +14 | -7 |
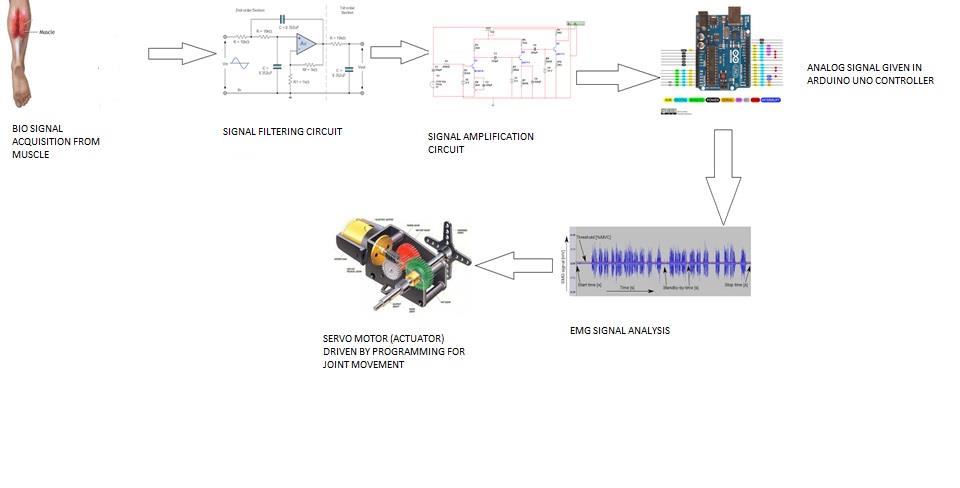
如图5所示的上述原理图中,展示了人工踝关节运动的硬件设计概念。在此模型中,肌电信号[10]从与踝关节相连的肌肉采集。通过滤波和放大电路进行信号调理。处理后的输出被送入Arduino接口板的模拟输入引脚。根据编程的[9]输出,伺服电机在原型的踝关节[12]处移动或改变方向。
III. 结果与讨论
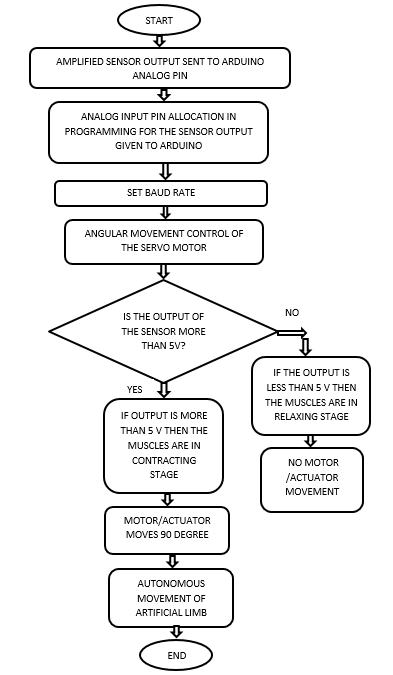
本文考虑了两种类型的踝关节运动,即跖屈和背屈。输出电压值从表2所示的指定位置获得,实验工作的图示见图7。观测到的电压作为输入信号被送入Arduino接口板,构成开发的系统的输入。根据用户指定指令,系统产生相应的电机运动输出。
| SL. 第 号 | 足底 屈曲 (毫伏) | 背屈 Flexion (毫伏) |
|---|---|---|
| 01 | 9 | 5 |
| 02 | 11 | 5 |
| 03 | 12 | 6 |
| 04 | 10 | 3 |
| 05 | 10 | 9 |
| 06 | 8 | 3 |
| 07 | 9 | 3 |
| 08 | 7 | 4 |
| 09 | 15 | 3 |
| 10 | 13 | 6 |
| 11 | 10 | 4 |
| 12 | 11 | 4 |
| 13 | 13 | 3 |
| 14 | 19 | 7 |
| 15 | 16 | 3 |
| 16 | 14 | 3 |
| 17 | 16 | 8 |
| 18 | 17 | 4 |
| 19 | 21 | 5 |
| 20 | 12 | 4 |
| 21 | 15 | 5 |
| 22 | 21 | 3 |
| 23 | 24 | 4 |
| 24 | 27 | 5 |
| 25 | 20 | 6 |
| 26 | 23 | 4 |
| 27 | 20 | 8 |
| 28 | 21 | 9 |
| 29 | 33 | 8 |
| 30 | 35 | 3 |
上述观察结果描述了两种屈曲类型的输出电压变化。

下肢模型的开发系统末端执行器运动是本工作的最终成果。
结论
传统的人工踝关节方法提供机械支撑结构以传递力。这使得模型的开发更加灵活,并有助于减轻重量,从而允许附加应用,例如在步态周期内主动调节腿部长度。假肢需要肌电图信号来控制踝关节处的电机运动。由肌电信号驱动具有适当输出信号的电机可执行下肢踝关节所需的操作。应考虑致力于为具有训练有紧行走方式的下肢截肢患者开发高效假肢。该研究将为未来假肢下肢解决方案的发展提供参考。

















 1045
1045

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









